



Jan Peters
@jan-peters.bsky.social
#RobotLearning Professor (#MachineLearning #Robotics) at @ias-tudarmstadt.bsky.social of
@tuda.bsky.social @dfki.bsky.social @hessianai.bsky.social
@tuda.bsky.social @dfki.bsky.social @hessianai.bsky.social
Pinned
Jan Peters
@jan-peters.bsky.social
· Dec 3
@ias-tudarmstadt.bsky.social is the new channel of my research group! Please follow it!
Reposted by Jan Peters

@timschneider94.bsky.social will present "Analysing the Interplay of Vision and Touch for Dexterous Insertion Tasks" by Janis Lenz, Tim Schneider, Theo Gruner, @daniel-palenicek.bsky.social, and
@jan-peters.bsky.social
🗓️ 13.06, 16:30 - 19:30
📍 Poster 100
See bsky.app/profile/tims...
@jan-peters.bsky.social
🗓️ 13.06, 16:30 - 19:30
📍 Poster 100
See bsky.app/profile/tims...
Stoked to present another work at RLDM 2025! If you’re into dexterous robotics, multimodal RL, or tactile sensing, swing by Poster 100 today to see what we cooked up 🦾✨
#Robotics #TactileSensing #RL #DexterousManipulation @ias_tudarmstadt
🧵
#Robotics #TactileSensing #RL #DexterousManipulation @ias_tudarmstadt
🧵

June 13, 2025 at 11:06 AM
@timschneider94.bsky.social will present "Analysing the Interplay of Vision and Touch for Dexterous Insertion Tasks" by Janis Lenz, Tim Schneider, Theo Gruner, @daniel-palenicek.bsky.social, and
@jan-peters.bsky.social
🗓️ 13.06, 16:30 - 19:30
📍 Poster 100
See bsky.app/profile/tims...
@jan-peters.bsky.social
🗓️ 13.06, 16:30 - 19:30
📍 Poster 100
See bsky.app/profile/tims...
Reposted by Jan Peters

Our work introduces a geometrically-aware approach that brings motion planning into Bayesian goal inference—an early but promising direction.
With @anindex.bsky.social , Theo Gruner, @joemwatson.bsky.social , @georgiachal.bsky.social & @jan-peters.bsky.social
With @anindex.bsky.social , Theo Gruner, @joemwatson.bsky.social , @georgiachal.bsky.social & @jan-peters.bsky.social
Bluesky
l.bsky.social
June 13, 2025 at 11:18 AM
Our work introduces a geometrically-aware approach that brings motion planning into Bayesian goal inference—an early but promising direction.
With @anindex.bsky.social , Theo Gruner, @joemwatson.bsky.social , @georgiachal.bsky.social & @jan-peters.bsky.social
With @anindex.bsky.social , Theo Gruner, @joemwatson.bsky.social , @georgiachal.bsky.social & @jan-peters.bsky.social
Reposted by Jan Peters
@kay-pompetzki.bsky.social will present "Geometrically-Aware Goal Inference: Leveraging Motion Planning as Inference" by Kay Pompetzki, @anindex.bsky.social, Theo Gruner, @georgiachal.bsky.social, and @jan-peters.bsky.social
🗓️ 13.06, 16:30 - 19:30
📍 Poster 86
See bsky.app/profile/kay-...
🗓️ 13.06, 16:30 - 19:30
📍 Poster 86
See bsky.app/profile/kay-...
June 13, 2025 at 11:21 AM
@kay-pompetzki.bsky.social will present "Geometrically-Aware Goal Inference: Leveraging Motion Planning as Inference" by Kay Pompetzki, @anindex.bsky.social, Theo Gruner, @georgiachal.bsky.social, and @jan-peters.bsky.social
🗓️ 13.06, 16:30 - 19:30
📍 Poster 86
See bsky.app/profile/kay-...
🗓️ 13.06, 16:30 - 19:30
📍 Poster 86
See bsky.app/profile/kay-...
Reposted by Jan Peters

🦾 By combining EPVFs with massive parallelism and careful regularization, we close the gap with state-of-the-art DRL in complex environments.
🔗 Full paper: arxiv.org/abs/2502.11949
✨ Finally, many thanks to @jan-peters.bsky.social and
@ias-tudarmstadt.bsky.social for the support!
🔗 Full paper: arxiv.org/abs/2502.11949
✨ Finally, many thanks to @jan-peters.bsky.social and
@ias-tudarmstadt.bsky.social for the support!

Massively Scaling Explicit Policy-conditioned Value Functions
We introduce a scaling strategy for Explicit Policy-Conditioned Value Functions (EPVFs) that significantly improves performance on challenging continuous-control tasks. EPVFs learn a value function V(...
arxiv.org
June 13, 2025 at 11:50 AM
🦾 By combining EPVFs with massive parallelism and careful regularization, we close the gap with state-of-the-art DRL in complex environments.
🔗 Full paper: arxiv.org/abs/2502.11949
✨ Finally, many thanks to @jan-peters.bsky.social and
@ias-tudarmstadt.bsky.social for the support!
🔗 Full paper: arxiv.org/abs/2502.11949
✨ Finally, many thanks to @jan-peters.bsky.social and
@ias-tudarmstadt.bsky.social for the support!
Reposted by Jan Peters
We will also present "Scaling Off-Policy Reinforcement Learning with Batch and Weight Normalization" by @daniel-palenicek.bsky.social, Florian Vogt, @joemwatson.bsky.social, and @jan-peters.bsky.social.
🗓️ 13.06, 16:30 - 19:30
📍 Poster 50
See bsky.app/profile/did:...
🗓️ 13.06, 16:30 - 19:30
📍 Poster 50
See bsky.app/profile/did:...
June 13, 2025 at 2:01 PM
We will also present "Scaling Off-Policy Reinforcement Learning with Batch and Weight Normalization" by @daniel-palenicek.bsky.social, Florian Vogt, @joemwatson.bsky.social, and @jan-peters.bsky.social.
🗓️ 13.06, 16:30 - 19:30
📍 Poster 50
See bsky.app/profile/did:...
🗓️ 13.06, 16:30 - 19:30
📍 Poster 50
See bsky.app/profile/did:...
Reposted by Jan Peters
Or come to my talk @ International Symposium on Adaptive Motion of Animals and Machines and LokoAssist Symposium (AMAM) on Friday at TU Darmstadt
Thanks to @ias-tudarmstadt.bsky.social, @jan-peters.bsky.social
Thanks to @ias-tudarmstadt.bsky.social, @jan-peters.bsky.social
July 2, 2025 at 6:19 PM
Or come to my talk @ International Symposium on Adaptive Motion of Animals and Machines and LokoAssist Symposium (AMAM) on Friday at TU Darmstadt
Thanks to @ias-tudarmstadt.bsky.social, @jan-peters.bsky.social
Thanks to @ias-tudarmstadt.bsky.social, @jan-peters.bsky.social
Reposted by Jan Peters

🎤 Very excited to give a talk @cohereforai.bsky.social next week Friday 🎤
I will be presenting the research I have been working on for the last 2 years with Carlo D'Eramo, @jan-peters.bsky.social, and many more collaborators!
I will be presenting the research I have been working on for the last 2 years with Carlo D'Eramo, @jan-peters.bsky.social, and many more collaborators!

July 11, 2025 at 4:17 PM
🎤 Very excited to give a talk @cohereforai.bsky.social next week Friday 🎤
I will be presenting the research I have been working on for the last 2 years with Carlo D'Eramo, @jan-peters.bsky.social, and many more collaborators!
I will be presenting the research I have been working on for the last 2 years with Carlo D'Eramo, @jan-peters.bsky.social, and many more collaborators!
Reposted by Jan Peters

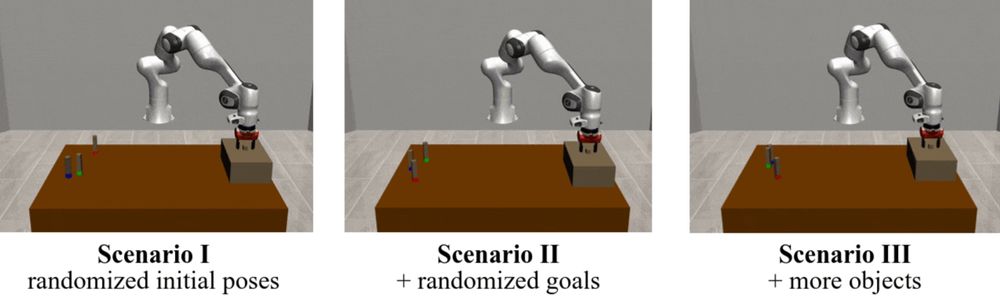
🎉Our paper "Context-Aware Deep Lagrangian Networks for MPC" was accepted at #IROS2025!
We present CaDeLaC: adaptive physics-consistent robot control via online SysID + MPC.
Paper: arxiv.org/abs/2506.15249
Big thanks to @ias-tudarmstadt.bsky.social @jan-peters.bsky.social @olegarenz.bsky.social
We present CaDeLaC: adaptive physics-consistent robot control via online SysID + MPC.
Paper: arxiv.org/abs/2506.15249
Big thanks to @ias-tudarmstadt.bsky.social @jan-peters.bsky.social @olegarenz.bsky.social
July 18, 2025 at 1:29 PM
🎉Our paper "Context-Aware Deep Lagrangian Networks for MPC" was accepted at #IROS2025!
We present CaDeLaC: adaptive physics-consistent robot control via online SysID + MPC.
Paper: arxiv.org/abs/2506.15249
Big thanks to @ias-tudarmstadt.bsky.social @jan-peters.bsky.social @olegarenz.bsky.social
We present CaDeLaC: adaptive physics-consistent robot control via online SysID + MPC.
Paper: arxiv.org/abs/2506.15249
Big thanks to @ias-tudarmstadt.bsky.social @jan-peters.bsky.social @olegarenz.bsky.social
Reposted by Jan Peters

Pushing for #icra but still missing real robot experiments? 😰
Skip the ROS headaches — get your Franka robot running in minutes with franky! 🦾
Super beginner-friendly, Pythonic, and fast to set up.
🔗 github.com/TimSchneider...
@ias-tudarmstadt.bsky.social @jan-peters.bsky.social
Skip the ROS headaches — get your Franka robot running in minutes with franky! 🦾
Super beginner-friendly, Pythonic, and fast to set up.
🔗 github.com/TimSchneider...
@ias-tudarmstadt.bsky.social @jan-peters.bsky.social

GitHub - TimSchneider42/franky: High-Level Control Library for Franka Robots with Python and C++ Support
High-Level Control Library for Franka Robots with Python and C++ Support - GitHub - TimSchneider42/franky: High-Level Control Library for Franka Robots with Python and C++ Support
github.com
July 31, 2025 at 5:09 PM
Pushing for #icra but still missing real robot experiments? 😰
Skip the ROS headaches — get your Franka robot running in minutes with franky! 🦾
Super beginner-friendly, Pythonic, and fast to set up.
🔗 github.com/TimSchneider...
@ias-tudarmstadt.bsky.social @jan-peters.bsky.social
Skip the ROS headaches — get your Franka robot running in minutes with franky! 🦾
Super beginner-friendly, Pythonic, and fast to set up.
🔗 github.com/TimSchneider...
@ias-tudarmstadt.bsky.social @jan-peters.bsky.social
Reposted by Jan Peters

🚀 New preprint! Introducing XQC— a simple, well-conditioned actor-critic that achieves SOTA sample efficiency in #RL
✅ ~4.5× fewer parameters than SimbaV2
✅ Scales to vision-based RL
👉 arxiv.org/pdf/2509.25174
Thanks to Florian Vogt @joemwatson.bsky.social @jan-peters.bsky.social
✅ ~4.5× fewer parameters than SimbaV2
✅ Scales to vision-based RL
👉 arxiv.org/pdf/2509.25174
Thanks to Florian Vogt @joemwatson.bsky.social @jan-peters.bsky.social

October 2, 2025 at 3:48 PM
🚀 New preprint! Introducing XQC— a simple, well-conditioned actor-critic that achieves SOTA sample efficiency in #RL
✅ ~4.5× fewer parameters than SimbaV2
✅ Scales to vision-based RL
👉 arxiv.org/pdf/2509.25174
Thanks to Florian Vogt @joemwatson.bsky.social @jan-peters.bsky.social
✅ ~4.5× fewer parameters than SimbaV2
✅ Scales to vision-based RL
👉 arxiv.org/pdf/2509.25174
Thanks to Florian Vogt @joemwatson.bsky.social @jan-peters.bsky.social
Reposted by Jan Peters
Warming up for #IROS2025 🔥
We’re releasing CaDeLaC as open source!
- Training pipeline
- Integration with acados for adaptive physics-consistent MPC
- Simulation + real Franka torque control
💻 github.com/Schulze18/ca...
@ias-tudarmstadt.bsky.social @jan-peters.bsky.social @olegarenz.bsky.social
We’re releasing CaDeLaC as open source!
- Training pipeline
- Integration with acados for adaptive physics-consistent MPC
- Simulation + real Franka torque control
💻 github.com/Schulze18/ca...
@ias-tudarmstadt.bsky.social @jan-peters.bsky.social @olegarenz.bsky.social
GitHub - Schulze18/cadelac: Context-Aware Deep Lagrangian Networks for Model Predictive Control (CaDeLaC)
Context-Aware Deep Lagrangian Networks for Model Predictive Control (CaDeLaC) - Schulze18/cadelac
github.com
October 14, 2025 at 12:40 PM
Warming up for #IROS2025 🔥
We’re releasing CaDeLaC as open source!
- Training pipeline
- Integration with acados for adaptive physics-consistent MPC
- Simulation + real Franka torque control
💻 github.com/Schulze18/ca...
@ias-tudarmstadt.bsky.social @jan-peters.bsky.social @olegarenz.bsky.social
We’re releasing CaDeLaC as open source!
- Training pipeline
- Integration with acados for adaptive physics-consistent MPC
- Simulation + real Franka torque control
💻 github.com/Schulze18/ca...
@ias-tudarmstadt.bsky.social @jan-peters.bsky.social @olegarenz.bsky.social
Reposted by Jan Peters
🇰🇷 Conferences are about finally meeting your collaborators from all around the world!
Check out our work on Embodiment Scaling Laws @CoRL2025
We investigate cross-embodiment learning as the next axis of scaling for truly generalist policies 📈
🔗 All details: embodiment-scaling-laws.github.io
Check out our work on Embodiment Scaling Laws @CoRL2025
We investigate cross-embodiment learning as the next axis of scaling for truly generalist policies 📈
🔗 All details: embodiment-scaling-laws.github.io

September 30, 2025 at 8:10 AM
🇰🇷 Conferences are about finally meeting your collaborators from all around the world!
Check out our work on Embodiment Scaling Laws @CoRL2025
We investigate cross-embodiment learning as the next axis of scaling for truly generalist policies 📈
🔗 All details: embodiment-scaling-laws.github.io
Check out our work on Embodiment Scaling Laws @CoRL2025
We investigate cross-embodiment learning as the next axis of scaling for truly generalist policies 📈
🔗 All details: embodiment-scaling-laws.github.io
Reposted by Jan Peters
As usual, @ewrl18.bsky.social was a wonderful experience.
I had the pleasure of presenting my research as a Contributed Talk 🎉
Special thanks to the organizers for making it happen!
I had the pleasure of presenting my research as a Contributed Talk 🎉
Special thanks to the organizers for making it happen!

September 19, 2025 at 4:08 PM
As usual, @ewrl18.bsky.social was a wonderful experience.
I had the pleasure of presenting my research as a Contributed Talk 🎉
Special thanks to the organizers for making it happen!
I had the pleasure of presenting my research as a Contributed Talk 🎉
Special thanks to the organizers for making it happen!
Reposted by Jan Peters
Today, @theovincent.bsky.social l will present "Eau De Q-Network: Adaptive Distillation of Neural Networks in Deep Reinforcement Learning" by Théo Vincent, @jan-peters.bsky.social, and Carlo D'Eramo.
🗓️ 12.06, 16:30 - 19:30
📍 Poster 28
See bsky.app/profile/theo...
🗓️ 12.06, 16:30 - 19:30
📍 Poster 28
See bsky.app/profile/theo...
Very excited to present 🎉Eau De Q-Network🎉 on Thursday @rldmdublin2025.bsky.social Poster #28
🔍Eau De Q-Network gradually prunes the network weights at the agent's learning pace, ultimately reaching a final sparsity level that is discovered by the algorithm!🔎
👉📰 arxiv.org/pdf/2503.01437
🔍Eau De Q-Network gradually prunes the network weights at the agent's learning pace, ultimately reaching a final sparsity level that is discovered by the algorithm!🔎
👉📰 arxiv.org/pdf/2503.01437

June 12, 2025 at 2:56 PM
Today, @theovincent.bsky.social l will present "Eau De Q-Network: Adaptive Distillation of Neural Networks in Deep Reinforcement Learning" by Théo Vincent, @jan-peters.bsky.social, and Carlo D'Eramo.
🗓️ 12.06, 16:30 - 19:30
📍 Poster 28
See bsky.app/profile/theo...
🗓️ 12.06, 16:30 - 19:30
📍 Poster 28
See bsky.app/profile/theo...
Reposted by Jan Peters
@timschneider94.bsky.social will present "Active Perception for Tactile Sensing: A Task-Agnostic Attention-Based Approach" by Tim Schneider, Cristiana de Farias, Roberto Calandra, Liming Chen, and @jan-peters.bsky.social
🗓️ 12.06, 16:30 - 19:30
📍 Poster 105
See bsky.app/profile/tims...
🗓️ 12.06, 16:30 - 19:30
📍 Poster 105
See bsky.app/profile/tims...
Excited to present our latest work at RLDM 2025! If you’re curious about tactile sensing, active perception, or RL in robotics, stop by my poster. Here’s what we’ve been up to:
🧵
#Robotics #TactileSensing #ReinforcementLearning #Transformers #ActivePerception @ias-tudarmstadt.bsky.social
🧵
#Robotics #TactileSensing #ReinforcementLearning #Transformers #ActivePerception @ias-tudarmstadt.bsky.social

June 12, 2025 at 2:57 PM
@timschneider94.bsky.social will present "Active Perception for Tactile Sensing: A Task-Agnostic Attention-Based Approach" by Tim Schneider, Cristiana de Farias, Roberto Calandra, Liming Chen, and @jan-peters.bsky.social
🗓️ 12.06, 16:30 - 19:30
📍 Poster 105
See bsky.app/profile/tims...
🗓️ 12.06, 16:30 - 19:30
📍 Poster 105
See bsky.app/profile/tims...
Reposted by Jan Peters

🚀 Interested in Neuro-Symbolic Learning and attending #ICRA2025? 🧠🤖
Do not miss Leon Keller presenting “Neuro-Symbolic Imitation Learning: Discovering Symbolic Abstractions for Skill Learning”.
Joint work of Honda Research Institute EU and @jan-peters.bsky.social (@ias-tudarmstadt.bsky.social).
Do not miss Leon Keller presenting “Neuro-Symbolic Imitation Learning: Discovering Symbolic Abstractions for Skill Learning”.
Joint work of Honda Research Institute EU and @jan-peters.bsky.social (@ias-tudarmstadt.bsky.social).
May 19, 2025 at 8:51 AM
🚀 Interested in Neuro-Symbolic Learning and attending #ICRA2025? 🧠🤖
Do not miss Leon Keller presenting “Neuro-Symbolic Imitation Learning: Discovering Symbolic Abstractions for Skill Learning”.
Joint work of Honda Research Institute EU and @jan-peters.bsky.social (@ias-tudarmstadt.bsky.social).
Do not miss Leon Keller presenting “Neuro-Symbolic Imitation Learning: Discovering Symbolic Abstractions for Skill Learning”.
Joint work of Honda Research Institute EU and @jan-peters.bsky.social (@ias-tudarmstadt.bsky.social).
Reposted by Jan Peters
Thanks to my co-authors Florian Vogt, @joemwatson.bsky.social @jan-peters.bsky.social
@hessianai.bsky.social @ias-tudarmstadt.bsky.social @dfki.bsky.social @cs-tudarmstadt.bsky.social
#RL #ML #AI
@hessianai.bsky.social @ias-tudarmstadt.bsky.social @dfki.bsky.social @cs-tudarmstadt.bsky.social
#RL #ML #AI
May 23, 2025 at 12:50 PM
Thanks to my co-authors Florian Vogt, @joemwatson.bsky.social @jan-peters.bsky.social
@hessianai.bsky.social @ias-tudarmstadt.bsky.social @dfki.bsky.social @cs-tudarmstadt.bsky.social
#RL #ML #AI
@hessianai.bsky.social @ias-tudarmstadt.bsky.social @dfki.bsky.social @cs-tudarmstadt.bsky.social
#RL #ML #AI
Reposted by Jan Peters

Work conducted @ias-tudarmstadt.bsky.social headed by @jan-peters.bsky.social @cs-tudarmstadt.bsky.social @tuda.bsky.social
Many thanks to all #LocoMuJoCo Contributors!
Many thanks to all #LocoMuJoCo Contributors!
April 18, 2025 at 10:47 PM
Work conducted @ias-tudarmstadt.bsky.social headed by @jan-peters.bsky.social @cs-tudarmstadt.bsky.social @tuda.bsky.social
Many thanks to all #LocoMuJoCo Contributors!
Many thanks to all #LocoMuJoCo Contributors!
Reposted by Jan Peters

First German Robotics Conference starting in Messezentrum Nuremberg! 400+ delegates plus RoboCup next door! @jan-peters.bsky.social @tuda.bsky.social



March 13, 2025 at 12:18 PM
First German Robotics Conference starting in Messezentrum Nuremberg! 400+ delegates plus RoboCup next door! @jan-peters.bsky.social @tuda.bsky.social
Reposted by Jan Peters
Many thanks to my colleagues and collaborators: Daniel Palenicek, Łukasz Antczak, @jan-peters.bsky.social and most importantly Jonathan Kinzel (@ibims1jfk.bsky.social), who interned at MAB Robotics and did the experiments.
Also thanks to MAB Robotics for providing the hardware and constant support!
Also thanks to MAB Robotics for providing the hardware and constant support!
March 18, 2025 at 10:24 PM
Many thanks to my colleagues and collaborators: Daniel Palenicek, Łukasz Antczak, @jan-peters.bsky.social and most importantly Jonathan Kinzel (@ibims1jfk.bsky.social), who interned at MAB Robotics and did the experiments.
Also thanks to MAB Robotics for providing the hardware and constant support!
Also thanks to MAB Robotics for providing the hardware and constant support!
Reposted by Jan Peters
We build on the efficient CrossQ DRL algorithm and combine it with two control architectures — Joint Target Prediction for agile maneuvers and Central Pattern Generators for stable, natural gaits — to train locomotion policies directly on the HoneyBadger quadruped robot from MAB Robotics.

March 18, 2025 at 10:24 PM
We build on the efficient CrossQ DRL algorithm and combine it with two control architectures — Joint Target Prediction for agile maneuvers and Central Pattern Generators for stable, natural gaits — to train locomotion policies directly on the HoneyBadger quadruped robot from MAB Robotics.
Reposted by Jan Peters
Intrigued? Check out the paper and videos here: nico-bohlinger.github.io/gait_in_eigh...
Gait in Eight
nico-bohlinger.github.io
March 18, 2025 at 10:24 PM
Intrigued? Check out the paper and videos here: nico-bohlinger.github.io/gait_in_eigh...
Reposted by Jan Peters
⚡️ Do you think training robot locomotion needs large scale simulation? Think again!
We train an omnidirectional locomotion policy directly on a real quadruped in just a few minutes 🚀
Top speeds of 0.85 m/s, two different control approaches, indoor and outdoor experiments, and more! 🤖🏃♂️
We train an omnidirectional locomotion policy directly on a real quadruped in just a few minutes 🚀
Top speeds of 0.85 m/s, two different control approaches, indoor and outdoor experiments, and more! 🤖🏃♂️
March 18, 2025 at 10:24 PM
⚡️ Do you think training robot locomotion needs large scale simulation? Think again!
We train an omnidirectional locomotion policy directly on a real quadruped in just a few minutes 🚀
Top speeds of 0.85 m/s, two different control approaches, indoor and outdoor experiments, and more! 🤖🏃♂️
We train an omnidirectional locomotion policy directly on a real quadruped in just a few minutes 🚀
Top speeds of 0.85 m/s, two different control approaches, indoor and outdoor experiments, and more! 🤖🏃♂️
Reposted by Jan Peters

HAINER stellt sich auch im Video vor: www.youtube.com/watch?v=5chc...

Außergewöhnlicher neuer Mitarbeiter: humanoider Roboter HAINER stellt sich vor
YouTube video by Technische Universität Darmstadt
www.youtube.com
February 28, 2025 at 3:43 PM
HAINER stellt sich auch im Video vor: www.youtube.com/watch?v=5chc...
Reposted by Jan Peters
Neues Level der Mensch-Roboter-Interaktion an der TUDa: Der humanoide Roboter aus der "Talos-Reihe" hört an der TU auf den Namen "HAINER". Mit der Anschaffung beginnt eine spannende Reise in die Zukunft der künstlichen Intelligenz und Robotik. Willkommen, HAINER! www.tu-darmstadt.de/universitaet...

Außergewöhnlicher Mitarbeiter
Die Technische Universität Darmstadt erweitert ihr Portfolio an interdisziplinären Forschungsgroßgeräten um ein besonderes Exemplar: den modernsten humanoiden Roboter „TALOS“. Weltweit gibt es derzeit...
www.tu-darmstadt.de
February 28, 2025 at 3:42 PM
Neues Level der Mensch-Roboter-Interaktion an der TUDa: Der humanoide Roboter aus der "Talos-Reihe" hört an der TU auf den Namen "HAINER". Mit der Anschaffung beginnt eine spannende Reise in die Zukunft der künstlichen Intelligenz und Robotik. Willkommen, HAINER! www.tu-darmstadt.de/universitaet...