



Nico Bohlinger
@nicobohlinger.bsky.social
26 | Morphology-aware Robotics, RL Research | PhD student at @ias-tudarmstadt.bsky.social
I'm presenting four different works at IROS 2025 this week in Hangzhou 🤖

October 20, 2025 at 4:46 AM
I'm presenting four different works at IROS 2025 this week in Hangzhou 🤖
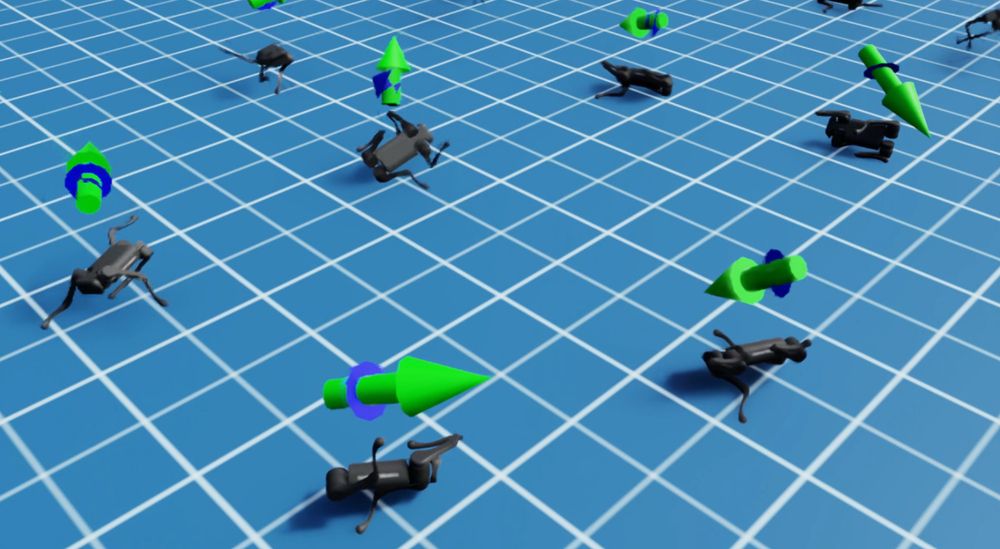
⚡️ Can one unified policy control 10 million different robots and zero-shot transfer to completely unseen robots, even humanoids?
🔗 Yes! Checkout our paper: arxiv.org/abs/2509.02815
🔗 Yes! Checkout our paper: arxiv.org/abs/2509.02815

October 2, 2025 at 4:51 AM
⚡️ Can one unified policy control 10 million different robots and zero-shot transfer to completely unseen robots, even humanoids?
🔗 Yes! Checkout our paper: arxiv.org/abs/2509.02815
🔗 Yes! Checkout our paper: arxiv.org/abs/2509.02815
🇰🇷 Conferences are about finally meeting your collaborators from all around the world!
Check out our work on Embodiment Scaling Laws @CoRL2025
We investigate cross-embodiment learning as the next axis of scaling for truly generalist policies 📈
🔗 All details: embodiment-scaling-laws.github.io
Check out our work on Embodiment Scaling Laws @CoRL2025
We investigate cross-embodiment learning as the next axis of scaling for truly generalist policies 📈
🔗 All details: embodiment-scaling-laws.github.io

September 30, 2025 at 8:10 AM
🇰🇷 Conferences are about finally meeting your collaborators from all around the world!
Check out our work on Embodiment Scaling Laws @CoRL2025
We investigate cross-embodiment learning as the next axis of scaling for truly generalist policies 📈
🔗 All details: embodiment-scaling-laws.github.io
Check out our work on Embodiment Scaling Laws @CoRL2025
We investigate cross-embodiment learning as the next axis of scaling for truly generalist policies 📈
🔗 All details: embodiment-scaling-laws.github.io
Reposted by Nico Bohlinger
Need for Speed or: How I Learned to Stop Worrying About Sample Efficiency
Part II of my blog series "Getting SAC to Work on a Massive Parallel Simulator" is out!
I've included everything I tried that didn't work (and why Jax PPO was different from PyTorch PPO)
araffin.github.io/post/tune-sa...
Part II of my blog series "Getting SAC to Work on a Massive Parallel Simulator" is out!
I've included everything I tried that didn't work (and why Jax PPO was different from PyTorch PPO)
araffin.github.io/post/tune-sa...

Getting SAC to Work on a Massive Parallel Simulator: Tuning for Speed (Part II) | Antonin Raffin | Homepage
This second post details how I tuned the Soft-Actor Critic (SAC) algorithm to learn as fast as PPO in the context of a massively parallel simulator (thousands of robots simulated in parallel).
araffin.github.io
July 7, 2025 at 12:11 PM
Need for Speed or: How I Learned to Stop Worrying About Sample Efficiency
Part II of my blog series "Getting SAC to Work on a Massive Parallel Simulator" is out!
I've included everything I tried that didn't work (and why Jax PPO was different from PyTorch PPO)
araffin.github.io/post/tune-sa...
Part II of my blog series "Getting SAC to Work on a Massive Parallel Simulator" is out!
I've included everything I tried that didn't work (and why Jax PPO was different from PyTorch PPO)
araffin.github.io/post/tune-sa...
Robot Randomization is fun!
July 2, 2025 at 6:19 PM
Robot Randomization is fun!
🚀 Checkout our new work at @rldmdublin2025.bsky.social today at poster#16!
We're showing how to make Explicit Policy-conditioned Value Functions V(θ) (originating from Faccio & Schmidhuber) work for more complex control tasks. The secret? Massive scaling!
We're showing how to make Explicit Policy-conditioned Value Functions V(θ) (originating from Faccio & Schmidhuber) work for more complex control tasks. The secret? Massive scaling!

June 13, 2025 at 11:50 AM
🚀 Checkout our new work at @rldmdublin2025.bsky.social today at poster#16!
We're showing how to make Explicit Policy-conditioned Value Functions V(θ) (originating from Faccio & Schmidhuber) work for more complex control tasks. The secret? Massive scaling!
We're showing how to make Explicit Policy-conditioned Value Functions V(θ) (originating from Faccio & Schmidhuber) work for more complex control tasks. The secret? Massive scaling!
Reposted by Nico Bohlinger

IAS is at RLDM 2025! We have many exiting works to share (see 👇), so come to our posters and talk to us!

June 12, 2025 at 2:55 PM
IAS is at RLDM 2025! We have many exiting works to share (see 👇), so come to our posters and talk to us!
⚡️ Do you think training robot locomotion needs large scale simulation? Think again!
We train an omnidirectional locomotion policy directly on a real quadruped in just a few minutes 🚀
Top speeds of 0.85 m/s, two different control approaches, indoor and outdoor experiments, and more! 🤖🏃♂️
We train an omnidirectional locomotion policy directly on a real quadruped in just a few minutes 🚀
Top speeds of 0.85 m/s, two different control approaches, indoor and outdoor experiments, and more! 🤖🏃♂️
March 18, 2025 at 10:24 PM
⚡️ Do you think training robot locomotion needs large scale simulation? Think again!
We train an omnidirectional locomotion policy directly on a real quadruped in just a few minutes 🚀
Top speeds of 0.85 m/s, two different control approaches, indoor and outdoor experiments, and more! 🤖🏃♂️
We train an omnidirectional locomotion policy directly on a real quadruped in just a few minutes 🚀
Top speeds of 0.85 m/s, two different control approaches, indoor and outdoor experiments, and more! 🤖🏃♂️
Reposted by Nico Bohlinger
"As researchers, we tend to publish only positive results, but I think a lot of valuable insights are lost in our unpublished failures."
New blog post: Getting SAC to Work on a Massive Parallel Simulator (part I)
araffin.github.io/post/sac-mas...
New blog post: Getting SAC to Work on a Massive Parallel Simulator (part I)
araffin.github.io/post/sac-mas...
Getting SAC to Work on a Massive Parallel Simulator: An RL Journey With Off-Policy Algorithms (Part I) | Antonin Raffin | Homepage
This post details how I managed to get the Soft-Actor Critic (SAC) and other off-policy reinforcement learning algorithms to work on massively parallel simulators (think Isaac Sim with thousands of ro...
araffin.github.io
March 10, 2025 at 8:22 AM
"As researchers, we tend to publish only positive results, but I think a lot of valuable insights are lost in our unpublished failures."
New blog post: Getting SAC to Work on a Massive Parallel Simulator (part I)
araffin.github.io/post/sac-mas...
New blog post: Getting SAC to Work on a Massive Parallel Simulator (part I)
araffin.github.io/post/sac-mas...