




Robotics papers
@roboticspapers.bsky.social
Curated feed of interesting and novel robotics papers.
See lists tab if you are into robotics research.
Starter pack -> https://go.bsky.app/SxrgryM
See lists tab if you are into robotics research.
Starter pack -> https://go.bsky.app/SxrgryM
Pinned
Reposted by Robotics papers

Heads up‼️ RI seminars are back underway for the spring semester! 🌷🤖
You can find the latest recorded talks from Andrea Bajcsy and Aaron Johnson on the CMU RI YouTube channel. Keep an eye out for more! ⬇️ #CMURobotics
www.youtube.com/@cmurobotics
You can find the latest recorded talks from Andrea Bajcsy and Aaron Johnson on the CMU RI YouTube channel. Keep an eye out for more! ⬇️ #CMURobotics
www.youtube.com/@cmurobotics

CMU Robotics Institute
Videos from the Carnegie Mellon University's Robotics Institute. The RI is part of the Carnegie Mellon University School of Computer Science.
www.youtube.com
February 14, 2025 at 10:42 PM
Heads up‼️ RI seminars are back underway for the spring semester! 🌷🤖
You can find the latest recorded talks from Andrea Bajcsy and Aaron Johnson on the CMU RI YouTube channel. Keep an eye out for more! ⬇️ #CMURobotics
www.youtube.com/@cmurobotics
You can find the latest recorded talks from Andrea Bajcsy and Aaron Johnson on the CMU RI YouTube channel. Keep an eye out for more! ⬇️ #CMURobotics
www.youtube.com/@cmurobotics
Reposted by Robotics papers

Just subscribed to Le Chat Pro from @MistralAI
It has pretty much the same features as ChatGPT and it feels good to support 🇪🇺
We need a diversity of solutions to accelerate innovation!
It has pretty much the same features as ChatGPT and it feels good to support 🇪🇺
We need a diversity of solutions to accelerate innovation!
February 10, 2025 at 4:01 PM
Just subscribed to Le Chat Pro from @MistralAI
It has pretty much the same features as ChatGPT and it feels good to support 🇪🇺
We need a diversity of solutions to accelerate innovation!
It has pretty much the same features as ChatGPT and it feels good to support 🇪🇺
We need a diversity of solutions to accelerate innovation!
"Our study reveals [...] increased model accuracy only marginally improves sample efficiency compared to learned models with identical horizons"
Surely an involved read from @tuda.bsky.social & @hessianai.bsky.social, but recommended if you are into model-based RL.
Also, ✨nice figures✨
Surely an involved read from @tuda.bsky.social & @hessianai.bsky.social, but recommended if you are into model-based RL.
Also, ✨nice figures✨
Diminishing Return of Value Expansion Methods
Authors: Daniel Palenicek, Michael Lutter, João Carvalho, Daniel Dennert, Faran Ahmad, and Jan Peters Fellow
pre-print -> arxiv.org/abs/2412.20537
#rl #reinforcement_learning #modelbased_rl #value_expension
Authors: Daniel Palenicek, Michael Lutter, João Carvalho, Daniel Dennert, Faran Ahmad, and Jan Peters Fellow
pre-print -> arxiv.org/abs/2412.20537
#rl #reinforcement_learning #modelbased_rl #value_expension

Diminishing Return of Value Expansion Methods
Model-based reinforcement learning aims to increase sample efficiency, but the accuracy of dynamics models and the resulting compounding errors are often seen as key limitations. This paper empiricall...
arxiv.org
January 8, 2025 at 5:37 PM
"Our study reveals [...] increased model accuracy only marginally improves sample efficiency compared to learned models with identical horizons"
Surely an involved read from @tuda.bsky.social & @hessianai.bsky.social, but recommended if you are into model-based RL.
Also, ✨nice figures✨
Surely an involved read from @tuda.bsky.social & @hessianai.bsky.social, but recommended if you are into model-based RL.
Also, ✨nice figures✨
Diminishing Return of Value Expansion Methods
Authors: Daniel Palenicek, Michael Lutter, João Carvalho, Daniel Dennert, Faran Ahmad, and Jan Peters Fellow
pre-print -> arxiv.org/abs/2412.20537
#rl #reinforcement_learning #modelbased_rl #value_expension
Authors: Daniel Palenicek, Michael Lutter, João Carvalho, Daniel Dennert, Faran Ahmad, and Jan Peters Fellow
pre-print -> arxiv.org/abs/2412.20537
#rl #reinforcement_learning #modelbased_rl #value_expension
Diminishing Return of Value Expansion Methods
Model-based reinforcement learning aims to increase sample efficiency, but the accuracy of dynamics models and the resulting compounding errors are often seen as key limitations. This paper empiricall...
arxiv.org
January 8, 2025 at 5:31 PM
Diminishing Return of Value Expansion Methods
Authors: Daniel Palenicek, Michael Lutter, João Carvalho, Daniel Dennert, Faran Ahmad, and Jan Peters Fellow
pre-print -> arxiv.org/abs/2412.20537
#rl #reinforcement_learning #modelbased_rl #value_expension
Authors: Daniel Palenicek, Michael Lutter, João Carvalho, Daniel Dennert, Faran Ahmad, and Jan Peters Fellow
pre-print -> arxiv.org/abs/2412.20537
#rl #reinforcement_learning #modelbased_rl #value_expension
Reposted by Robotics papers

For other 3D vision newcomers to blue sky: I highly recommend joning @chrisoffner3d.bsky.social 's list to follow the right people ;): go.bsky.app/Cfm9XFe
January 8, 2025 at 2:28 PM
For other 3D vision newcomers to blue sky: I highly recommend joning @chrisoffner3d.bsky.social 's list to follow the right people ;): go.bsky.app/Cfm9XFe
🎊 Happy new year robotics community !
Best wishes for the growing robotics community 🥂
Paper curation will resume tomorrow, but user lists and the starter pack are continuously updated.
Most notably, Pr. (@yiannisdemiris.bsky.social) from Imperial College joined us recently and has been added !
Best wishes for the growing robotics community 🥂
Paper curation will resume tomorrow, but user lists and the starter pack are continuously updated.
Most notably, Pr. (@yiannisdemiris.bsky.social) from Imperial College joined us recently and has been added !
January 7, 2025 at 4:58 PM
🎊 Happy new year robotics community !
Best wishes for the growing robotics community 🥂
Paper curation will resume tomorrow, but user lists and the starter pack are continuously updated.
Most notably, Pr. (@yiannisdemiris.bsky.social) from Imperial College joined us recently and has been added !
Best wishes for the growing robotics community 🥂
Paper curation will resume tomorrow, but user lists and the starter pack are continuously updated.
Most notably, Pr. (@yiannisdemiris.bsky.social) from Imperial College joined us recently and has been added !
Reposted by Robotics papers

Release of open source software (inc #ROS packages) to control the Boston Dynamics Spot with #Hololens #AR glasses. Work by Dr Rodrigo Chacon at the Personal #Robotics Lab at Imperial College London. Papers with extensive user evaluations, code and more videos at github.com/ImperialColl...
December 31, 2024 at 5:20 PM
Release of open source software (inc #ROS packages) to control the Boston Dynamics Spot with #Hololens #AR glasses. Work by Dr Rodrigo Chacon at the Personal #Robotics Lab at Imperial College London. Papers with extensive user evaluations, code and more videos at github.com/ImperialColl...
Reposted by Robotics papers

Inspired by @wimlds.bsky.social , I looked for a "Women in Machine Learning" starter pack and couldn't find one.
So I created one! May have some mistakes. I'll try to do an AI ethics one next. 🤗
go.bsky.app/LT6CwNN
So I created one! May have some mistakes. I'll try to do an AI ethics one next. 🤗
go.bsky.app/LT6CwNN
December 11, 2024 at 4:02 AM
Inspired by @wimlds.bsky.social , I looked for a "Women in Machine Learning" starter pack and couldn't find one.
So I created one! May have some mistakes. I'll try to do an AI ethics one next. 🤗
go.bsky.app/LT6CwNN
So I created one! May have some mistakes. I'll try to do an AI ethics one next. 🤗
go.bsky.app/LT6CwNN
Reposted by Robotics papers

If you're training models with more than one loss term, I can again strongly recommend our ConFIG optimizer: tum-pbs.github.io/ConFIG/ , simply swap out Adam&Co. for ConFIG, and you can potentially see substantial reductions in your training loss 😁 We'd also be curious to hear how it works for you
December 10, 2024 at 7:11 AM
If you're training models with more than one loss term, I can again strongly recommend our ConFIG optimizer: tum-pbs.github.io/ConFIG/ , simply swap out Adam&Co. for ConFIG, and you can potentially see substantial reductions in your training loss 😁 We'd also be curious to hear how it works for you
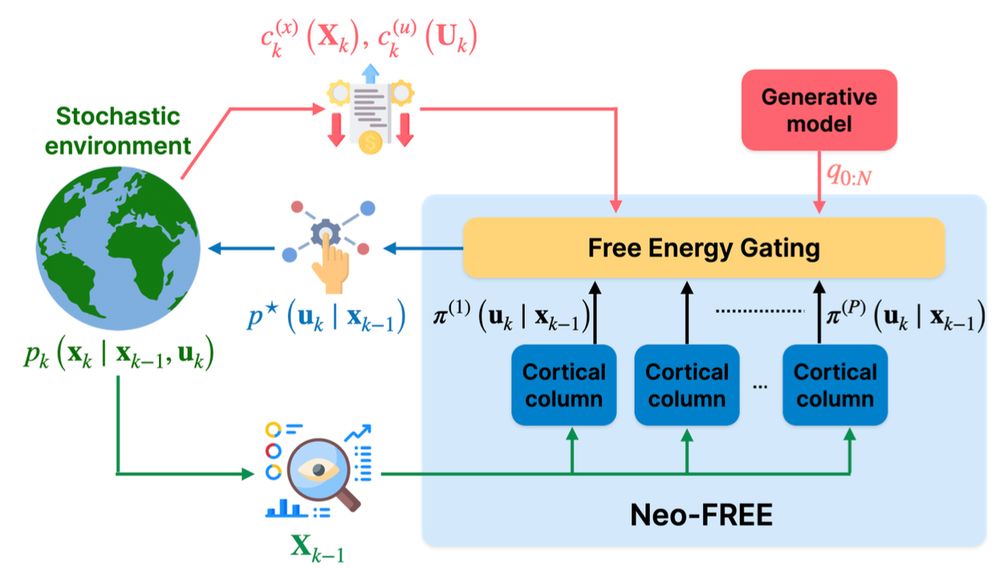
A fresh approach to optimal control leveraging ideas from cognitive science.
With only 10 pages it is a recommended read for its original approach and the potential in further developments.
With only 10 pages it is a recommended read for its original approach and the potential in further developments.
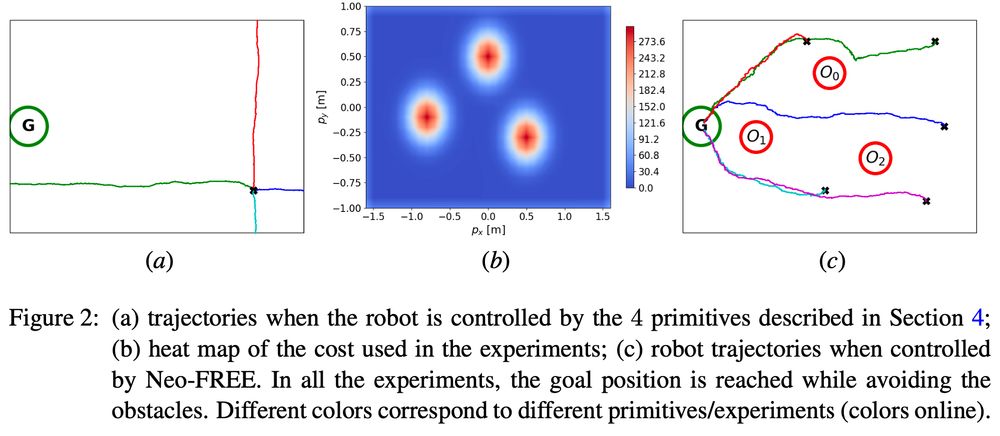
Neo-FREE: Policy Composition Through Thousand Brains And Free Energy Optimization
Authors: Francesca Rossi, Émiland Garrabé, Giovanni Russo
pre-print -> arxiv.org/abs/2412.06636
code -> github.com/GIOVRUSSO/Co...
#robotics #control #optimal_control #movement_primitives
Authors: Francesca Rossi, Émiland Garrabé, Giovanni Russo
pre-print -> arxiv.org/abs/2412.06636
code -> github.com/GIOVRUSSO/Co...
#robotics #control #optimal_control #movement_primitives
December 10, 2024 at 10:47 AM
A fresh approach to optimal control leveraging ideas from cognitive science.
With only 10 pages it is a recommended read for its original approach and the potential in further developments.
With only 10 pages it is a recommended read for its original approach and the potential in further developments.
Neo-FREE: Policy Composition Through Thousand Brains And Free Energy Optimization
Authors: Francesca Rossi, Émiland Garrabé, Giovanni Russo
pre-print -> arxiv.org/abs/2412.06636
code -> github.com/GIOVRUSSO/Co...
#robotics #control #optimal_control #movement_primitives
Authors: Francesca Rossi, Émiland Garrabé, Giovanni Russo
pre-print -> arxiv.org/abs/2412.06636
code -> github.com/GIOVRUSSO/Co...
#robotics #control #optimal_control #movement_primitives
December 10, 2024 at 10:44 AM
Neo-FREE: Policy Composition Through Thousand Brains And Free Energy Optimization
Authors: Francesca Rossi, Émiland Garrabé, Giovanni Russo
pre-print -> arxiv.org/abs/2412.06636
code -> github.com/GIOVRUSSO/Co...
#robotics #control #optimal_control #movement_primitives
Authors: Francesca Rossi, Émiland Garrabé, Giovanni Russo
pre-print -> arxiv.org/abs/2412.06636
code -> github.com/GIOVRUSSO/Co...
#robotics #control #optimal_control #movement_primitives
Reposted by Robotics papers

We now have a starter pack for ROBOTICS. This should be a fun group.
Are you building robots or sharing thoughts/research on the state of robotics? 🤖🦿
Request to join if you would like to be added, before it fills up.
go.bsky.app/61LAgEj
Are you building robots or sharing thoughts/research on the state of robotics? 🤖🦿
Request to join if you would like to be added, before it fills up.
go.bsky.app/61LAgEj
November 17, 2024 at 3:18 PM
We now have a starter pack for ROBOTICS. This should be a fun group.
Are you building robots or sharing thoughts/research on the state of robotics? 🤖🦿
Request to join if you would like to be added, before it fills up.
go.bsky.app/61LAgEj
Are you building robots or sharing thoughts/research on the state of robotics? 🤖🦿
Request to join if you would like to be added, before it fills up.
go.bsky.app/61LAgEj
Reposted by Robotics papers

The first is full but still incomplete. Here is the second one, also largely incomplete. Just say 👋 and you will be added.
go.bsky.app/DWo6RbA
go.bsky.app/DWo6RbA
November 24, 2024 at 2:21 PM
The first is full but still incomplete. Here is the second one, also largely incomplete. Just say 👋 and you will be added.
go.bsky.app/DWo6RbA
go.bsky.app/DWo6RbA
Reposted by Robotics papers

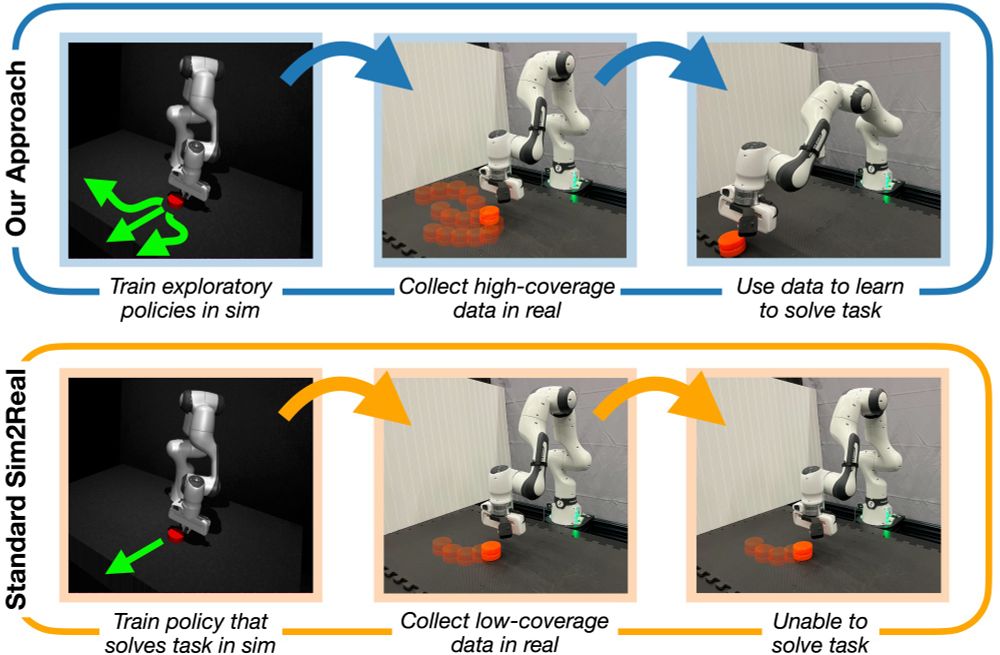
We’ve been investigating how sim, while wrong, can be useful for real-world robotic RL! In our #NeurIPS2024 work, we theoretically showed how naive sim2real transfer can be inefficient, but if you *learn to explore* in sim, this transfers to the real world! We show this works on real robots! 🧵(1/6)
December 6, 2024 at 12:46 AM
We’ve been investigating how sim, while wrong, can be useful for real-world robotic RL! In our #NeurIPS2024 work, we theoretically showed how naive sim2real transfer can be inefficient, but if you *learn to explore* in sim, this transfers to the real world! We show this works on real robots! 🧵(1/6)
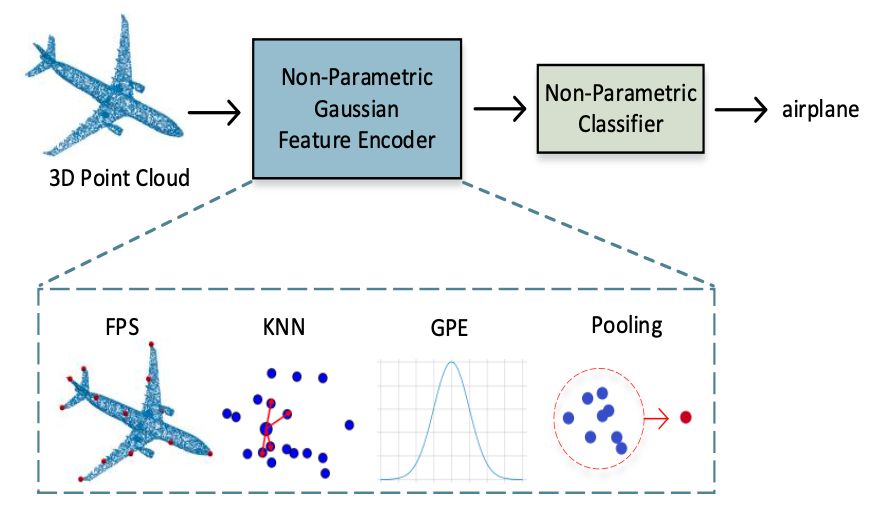
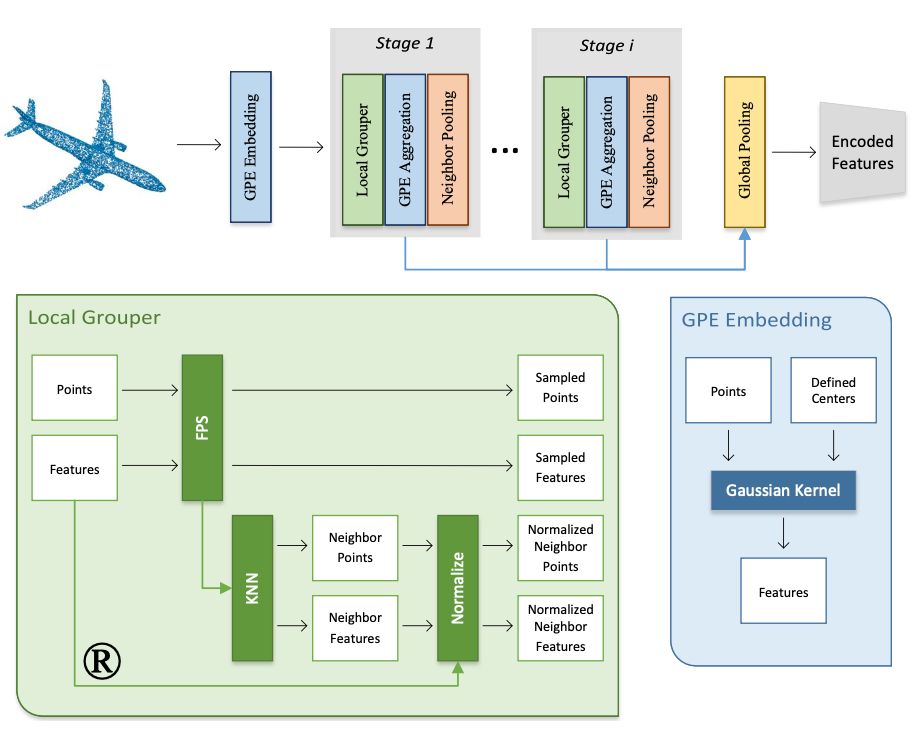
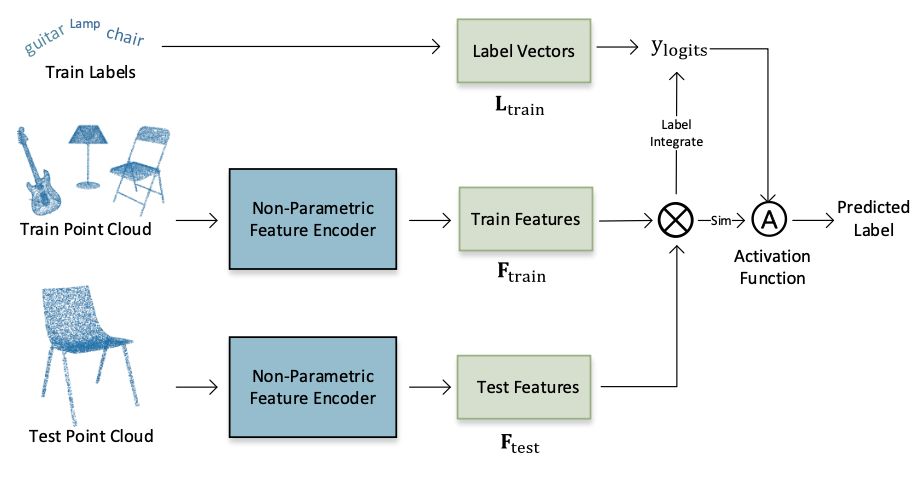
Point cloud segmentation is a crucial challenge in robotics, which this paper tackles without deep learning but by introducing a new member to the ever-growing families of positional embeddings.
While confusing at times, it is an interesting read if you are into machine learning for geometric tasks
While confusing at times, it is an interesting read if you are into machine learning for geometric tasks
Point-GN: A Non-Parametric Network Using Gaussian Positional Encoding for Point Cloud Classification
Authors: Marzieh Mohammadi, Amir Salarpour
pre-print -> arxiv.org/abs/2412.03056
code (to come) -> github.com/asalarpour/P...
#point_cloud #classification #positional_embedding #non_parametric
Authors: Marzieh Mohammadi, Amir Salarpour
pre-print -> arxiv.org/abs/2412.03056
code (to come) -> github.com/asalarpour/P...
#point_cloud #classification #positional_embedding #non_parametric
December 5, 2024 at 4:40 PM
Point cloud segmentation is a crucial challenge in robotics, which this paper tackles without deep learning but by introducing a new member to the ever-growing families of positional embeddings.
While confusing at times, it is an interesting read if you are into machine learning for geometric tasks
While confusing at times, it is an interesting read if you are into machine learning for geometric tasks
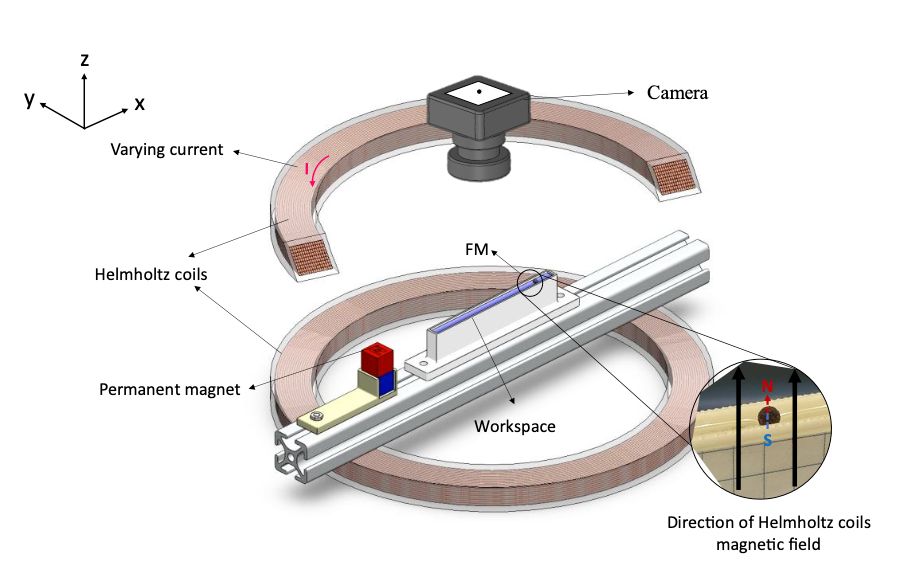
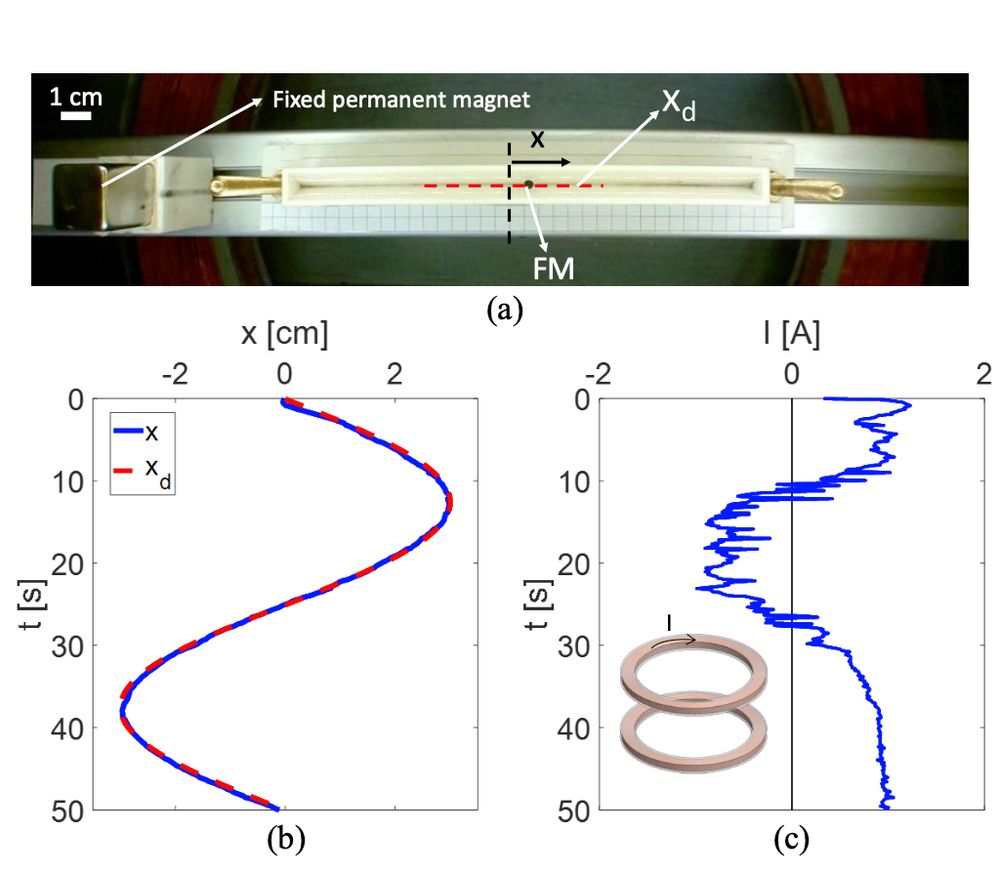
🤖 "Robot" usually evokes a #quadruped or #humanoid system. However, they can also be... liquid ferrofluid marbles.
📄 This 100% 'machine learning' free paper is a sobering return to physics and reminds us that #robotics is, before all, the art of controlling motion.
📄 This 100% 'machine learning' free paper is a sobering return to physics and reminds us that #robotics is, before all, the art of controlling motion.
Novel Magnetic Actuation Strategies for Precise Ferrofluid Marble Manipulation in Magnetic Digital Microfluidics: Position Control and Applications
Authors: M. H. Sarkhosh, H. N. Pishkenari et al.
pre-print -> arxiv.org/abs/2412.02859
#robotics #control #manipulation #microfluidics
Authors: M. H. Sarkhosh, H. N. Pishkenari et al.
pre-print -> arxiv.org/abs/2412.02859
#robotics #control #manipulation #microfluidics
December 5, 2024 at 12:18 PM
🤖 "Robot" usually evokes a #quadruped or #humanoid system. However, they can also be... liquid ferrofluid marbles.
📄 This 100% 'machine learning' free paper is a sobering return to physics and reminds us that #robotics is, before all, the art of controlling motion.
📄 This 100% 'machine learning' free paper is a sobering return to physics and reminds us that #robotics is, before all, the art of controlling motion.
Reposted by Robotics papers
I'm excited about scaling up robot learning! We’ve been scaling up data gen with RL in realistic sims generated from crowdsourced videos. Enables data collection far more cheaply than real world teleop. Importantly, data becomes *cheaper* with more environments and transfers to real robots! 🧵 (1/N)
December 5, 2024 at 2:13 AM
I'm excited about scaling up robot learning! We’ve been scaling up data gen with RL in realistic sims generated from crowdsourced videos. Enables data collection far more cheaply than real world teleop. Importantly, data becomes *cheaper* with more environments and transfers to real robots! 🧵 (1/N)
From Instantaneous to Predictive Control: A More Intuitive and Tunable MPC Formulation for Robot Manipulators
Authors: Johan Ubbink, Ruan Viljoen, Erwin Aertbeliën, Wilm Decré, Joris De Schutter
pre-print -> arxiv.org/abs/2412.015...
#robotics #motion_control #mpc
Authors: Johan Ubbink, Ruan Viljoen, Erwin Aertbeliën, Wilm Decré, Joris De Schutter
pre-print -> arxiv.org/abs/2412.015...
#robotics #motion_control #mpc

From Instantaneous to Predictive Control: A More Intuitive and Tunable MPC Formulation for Robot Manipulators
Model predictive control (MPC) has become increasingly popular for the control of robot manipulators due to its improved performance compared to instantaneous control approaches. However, tuning these...
arxiv.org
December 4, 2024 at 11:02 PM
From Instantaneous to Predictive Control: A More Intuitive and Tunable MPC Formulation for Robot Manipulators
Authors: Johan Ubbink, Ruan Viljoen, Erwin Aertbeliën, Wilm Decré, Joris De Schutter
pre-print -> arxiv.org/abs/2412.015...
#robotics #motion_control #mpc
Authors: Johan Ubbink, Ruan Viljoen, Erwin Aertbeliën, Wilm Decré, Joris De Schutter
pre-print -> arxiv.org/abs/2412.015...
#robotics #motion_control #mpc
Check out my #robotics lists and please RT to reach people I might have missed.
Robotics & ML -> bsky.app/profile/did:...
Robotics Professors -> bsky.app/profile/did:...
Starter pack will be updated to mirror Robotics & ML posting
Robotics & ML -> bsky.app/profile/did:...
Robotics Professors -> bsky.app/profile/did:...
Starter pack will be updated to mirror Robotics & ML posting
December 4, 2024 at 6:07 PM
Check out my #robotics lists and please RT to reach people I might have missed.
Robotics & ML -> bsky.app/profile/did:...
Robotics Professors -> bsky.app/profile/did:...
Starter pack will be updated to mirror Robotics & ML posting
Robotics & ML -> bsky.app/profile/did:...
Robotics Professors -> bsky.app/profile/did:...
Starter pack will be updated to mirror Robotics & ML posting
In my continued effort to give visibility to researchers and lower the entry bar for robotics enthusiasts on 🦋, I have found that lists are a great tools to order content.
Lists can be pinned to the home screen, effectively acting as curated feeds.
Lists can be pinned to the home screen, effectively acting as curated feeds.
December 4, 2024 at 6:03 PM
In my continued effort to give visibility to researchers and lower the entry bar for robotics enthusiasts on 🦋, I have found that lists are a great tools to order content.
Lists can be pinned to the home screen, effectively acting as curated feeds.
Lists can be pinned to the home screen, effectively acting as curated feeds.
Reposted by Robotics papers

With 20 spaces left in the #ResearchIntegrity Starter Pack, could we fill these with early career researchers/professionals or others who might not feel confident putting themselves on the list?
If you have suggestions for people who'd be a good fit, please let me know!
go.bsky.app/5NJ9Z4N
If you have suggestions for people who'd be a good fit, please let me know!
go.bsky.app/5NJ9Z4N
December 4, 2024 at 10:16 AM
With 20 spaces left in the #ResearchIntegrity Starter Pack, could we fill these with early career researchers/professionals or others who might not feel confident putting themselves on the list?
If you have suggestions for people who'd be a good fit, please let me know!
go.bsky.app/5NJ9Z4N
If you have suggestions for people who'd be a good fit, please let me know!
go.bsky.app/5NJ9Z4N
Reposted by Robotics papers

I made an HRI Starter Pack!
If you are a Human-Robot Interaction or Social Robotics researcher and I missed you while scrolling through bsky's suggestions, just ping me and I'll add ya.
go.bsky.app/CsnNn3s
If you are a Human-Robot Interaction or Social Robotics researcher and I missed you while scrolling through bsky's suggestions, just ping me and I'll add ya.
go.bsky.app/CsnNn3s
December 3, 2024 at 6:37 PM
I made an HRI Starter Pack!
If you are a Human-Robot Interaction or Social Robotics researcher and I missed you while scrolling through bsky's suggestions, just ping me and I'll add ya.
go.bsky.app/CsnNn3s
If you are a Human-Robot Interaction or Social Robotics researcher and I missed you while scrolling through bsky's suggestions, just ping me and I'll add ya.
go.bsky.app/CsnNn3s
"Unlike vision and language, data for learning is not available passively[...]. This makes applying the same recipes we did in vision and language challenging"
#real2sim is a strong emergent tendency in robotics this year.
See previously shared articles
🧵
#real2sim is a strong emergent tendency in robotics this year.
See previously shared articles
🧵
December 3, 2024 at 3:07 PM
"Unlike vision and language, data for learning is not available passively[...]. This makes applying the same recipes we did in vision and language challenging"
#real2sim is a strong emergent tendency in robotics this year.
See previously shared articles
🧵
#real2sim is a strong emergent tendency in robotics this year.
See previously shared articles
🧵
Robot Learning with Super-Linear Scaling
Authors: M. Torne, A. Jain, J. Yuan, V. Macha, L. Ankile, A. Simeonov, P. Agrawal, A. Gupta
pre-print -> arxiv.org/abs/2412.017...
website -> casher-robot-learning.github.io/CASHER/
#robotics #rl #reinforcement_learning #data_generation #real2sim2real
Authors: M. Torne, A. Jain, J. Yuan, V. Macha, L. Ankile, A. Simeonov, P. Agrawal, A. Gupta
pre-print -> arxiv.org/abs/2412.017...
website -> casher-robot-learning.github.io/CASHER/
#robotics #rl #reinforcement_learning #data_generation #real2sim2real


December 3, 2024 at 2:58 PM
Robot Learning with Super-Linear Scaling
Authors: M. Torne, A. Jain, J. Yuan, V. Macha, L. Ankile, A. Simeonov, P. Agrawal, A. Gupta
pre-print -> arxiv.org/abs/2412.017...
website -> casher-robot-learning.github.io/CASHER/
#robotics #rl #reinforcement_learning #data_generation #real2sim2real
Authors: M. Torne, A. Jain, J. Yuan, V. Macha, L. Ankile, A. Simeonov, P. Agrawal, A. Gupta
pre-print -> arxiv.org/abs/2412.017...
website -> casher-robot-learning.github.io/CASHER/
#robotics #rl #reinforcement_learning #data_generation #real2sim2real