



Nico Bohlinger
@nicobohlinger.bsky.social
26 | Morphology-aware Robotics, RL Research | PhD student at @ias-tudarmstadt.bsky.social
4. Multi-Embodiment Locomotion at Scale with extreme Embodiment Randomization -> Monday Workshop on Foundation Models for Robotic Design & Friday Workshop on Challenges and Applications Prospects for
Paper: ias.informatik.tu-darmstadt.de/uploads/Team...
Paper: ias.informatik.tu-darmstadt.de/uploads/Team...
October 20, 2025 at 4:46 AM
4. Multi-Embodiment Locomotion at Scale with extreme Embodiment Randomization -> Monday Workshop on Foundation Models for Robotic Design & Friday Workshop on Challenges and Applications Prospects for
Paper: ias.informatik.tu-darmstadt.de/uploads/Team...
Paper: ias.informatik.tu-darmstadt.de/uploads/Team...
3. Evaluation of an Actuated Spine in Agile Quadruped Locomotion -> Friday Workshop on Climbing Robotics
Paper: ias.informatik.tu-darmstadt.de/uploads/Team...
Paper: ias.informatik.tu-darmstadt.de/uploads/Team...
ias.informatik.tu-darmstadt.de
October 20, 2025 at 4:46 AM
3. Evaluation of an Actuated Spine in Agile Quadruped Locomotion -> Friday Workshop on Climbing Robotics
Paper: ias.informatik.tu-darmstadt.de/uploads/Team...
Paper: ias.informatik.tu-darmstadt.de/uploads/Team...
2. Bridge the Gap: Enhancing Quadruped Locomotion with Vertical Ground Perturbations -> Wednesday Session, Bioinspired Robot Learning
Website: nico-bohlinger.github.io/bridge_the_g...
Website: nico-bohlinger.github.io/bridge_the_g...
October 20, 2025 at 4:46 AM
2. Bridge the Gap: Enhancing Quadruped Locomotion with Vertical Ground Perturbations -> Wednesday Session, Bioinspired Robot Learning
Website: nico-bohlinger.github.io/bridge_the_g...
Website: nico-bohlinger.github.io/bridge_the_g...
1. Gait in Eight: Efficient On-Robot Learning for Omnidirectional Quadruped Locomotion -> Wednesday Session, Legged Robots 1 - Locomotion
Website: nico-bohlinger.github.io/gait_in_eigh...
Website: nico-bohlinger.github.io/gait_in_eigh...
October 20, 2025 at 4:46 AM
1. Gait in Eight: Efficient On-Robot Learning for Omnidirectional Quadruped Locomotion -> Wednesday Session, Legged Robots 1 - Locomotion
Website: nico-bohlinger.github.io/gait_in_eigh...
Website: nico-bohlinger.github.io/gait_in_eigh...
Many thanks to @jan-peters.bsky.social and @ias-tudarmstadt.bsky.social for all the support!
October 2, 2025 at 4:51 AM
Many thanks to @jan-peters.bsky.social and @ias-tudarmstadt.bsky.social for all the support!
If you are interested in massive multi-embodiment learning, come and chat with me at:
- Today, WS Sim-to-Real Transfer for Humanoid Robots
at Humanoids2025
- Oct 20th, WS Foundation Models for Robotic Design
at IROS2025
- Oct 24th, WS Reconfigurable Modular Robots
at IROS2025
- Today, WS Sim-to-Real Transfer for Humanoid Robots
at Humanoids2025
- Oct 20th, WS Foundation Models for Robotic Design
at IROS2025
- Oct 24th, WS Reconfigurable Modular Robots
at IROS2025
October 2, 2025 at 4:51 AM
If you are interested in massive multi-embodiment learning, come and chat with me at:
- Today, WS Sim-to-Real Transfer for Humanoid Robots
at Humanoids2025
- Oct 20th, WS Foundation Models for Robotic Design
at IROS2025
- Oct 24th, WS Reconfigurable Modular Robots
at IROS2025
- Today, WS Sim-to-Real Transfer for Humanoid Robots
at Humanoids2025
- Oct 20th, WS Foundation Models for Robotic Design
at IROS2025
- Oct 24th, WS Reconfigurable Modular Robots
at IROS2025
👏 Huge thanks to everyone involved:
Bo Ai, Liu Dai, Dichen Li, Tongzhou Mu, Zhanxin Wu, K. Fay, Henrik I. Christensen, @jan-peters.bsky.social and Hao Su
Bo Ai, Liu Dai, Dichen Li, Tongzhou Mu, Zhanxin Wu, K. Fay, Henrik I. Christensen, @jan-peters.bsky.social and Hao Su
September 30, 2025 at 8:10 AM
👏 Huge thanks to everyone involved:
Bo Ai, Liu Dai, Dichen Li, Tongzhou Mu, Zhanxin Wu, K. Fay, Henrik I. Christensen, @jan-peters.bsky.social and Hao Su
Bo Ai, Liu Dai, Dichen Li, Tongzhou Mu, Zhanxin Wu, K. Fay, Henrik I. Christensen, @jan-peters.bsky.social and Hao Su
Or come to my talk @ International Symposium on Adaptive Motion of Animals and Machines and LokoAssist Symposium (AMAM) on Friday at TU Darmstadt
Thanks to @ias-tudarmstadt.bsky.social, @jan-peters.bsky.social
Thanks to @ias-tudarmstadt.bsky.social, @jan-peters.bsky.social
July 2, 2025 at 6:19 PM
Or come to my talk @ International Symposium on Adaptive Motion of Animals and Machines and LokoAssist Symposium (AMAM) on Friday at TU Darmstadt
Thanks to @ias-tudarmstadt.bsky.social, @jan-peters.bsky.social
Thanks to @ias-tudarmstadt.bsky.social, @jan-peters.bsky.social
If you want to know how to create a neural network architecture to train one policy to control any robot embodiment, check out: nico-bohlinger.github.io/one_policy_t...
One Policy to Run Them All
nico-bohlinger.github.io
July 2, 2025 at 6:19 PM
If you want to know how to create a neural network architecture to train one policy to control any robot embodiment, check out: nico-bohlinger.github.io/one_policy_t...
🦾 By combining EPVFs with massive parallelism and careful regularization, we close the gap with state-of-the-art DRL in complex environments.
🔗 Full paper: arxiv.org/abs/2502.11949
✨ Finally, many thanks to @jan-peters.bsky.social and
@ias-tudarmstadt.bsky.social for the support!
🔗 Full paper: arxiv.org/abs/2502.11949
✨ Finally, many thanks to @jan-peters.bsky.social and
@ias-tudarmstadt.bsky.social for the support!

Massively Scaling Explicit Policy-conditioned Value Functions
We introduce a scaling strategy for Explicit Policy-Conditioned Value Functions (EPVFs) that significantly improves performance on challenging continuous-control tasks. EPVFs learn a value function V(...
arxiv.org
June 13, 2025 at 11:50 AM
🦾 By combining EPVFs with massive parallelism and careful regularization, we close the gap with state-of-the-art DRL in complex environments.
🔗 Full paper: arxiv.org/abs/2502.11949
✨ Finally, many thanks to @jan-peters.bsky.social and
@ias-tudarmstadt.bsky.social for the support!
🔗 Full paper: arxiv.org/abs/2502.11949
✨ Finally, many thanks to @jan-peters.bsky.social and
@ias-tudarmstadt.bsky.social for the support!
⚙️ Architecture matters
We also explored architectures like Universal Neural Functionals (UNF) and action-based representations ("Probing").
And yes, our scaled EPVFs are competitive with PPO and SAC in their final performance.
We also explored architectures like Universal Neural Functionals (UNF) and action-based representations ("Probing").
And yes, our scaled EPVFs are competitive with PPO and SAC in their final performance.

June 13, 2025 at 11:50 AM
⚙️ Architecture matters
We also explored architectures like Universal Neural Functionals (UNF) and action-based representations ("Probing").
And yes, our scaled EPVFs are competitive with PPO and SAC in their final performance.
We also explored architectures like Universal Neural Functionals (UNF) and action-based representations ("Probing").
And yes, our scaled EPVFs are competitive with PPO and SAC in their final performance.
⚡ But it's not just about size
Key ingredients for stability and performance are weight clipping and using uniform noise scaled to the parameter magnitudes.
Our ablation studies show just how critical these components are. Without them, performance collapses.
Key ingredients for stability and performance are weight clipping and using uniform noise scaled to the parameter magnitudes.
Our ablation studies show just how critical these components are. Without them, performance collapses.

June 13, 2025 at 11:50 AM
⚡ But it's not just about size
Key ingredients for stability and performance are weight clipping and using uniform noise scaled to the parameter magnitudes.
Our ablation studies show just how critical these components are. Without them, performance collapses.
Key ingredients for stability and performance are weight clipping and using uniform noise scaled to the parameter magnitudes.
Our ablation studies show just how critical these components are. Without them, performance collapses.
📈 Massive Scaling Pays Off
We see strong scaling effects when using MJX to rollout up to 4000 differently perturbed policies in parallel.
This explores the policy space effectively and large batches drastically reduce the variance of the resulting gradients.
We see strong scaling effects when using MJX to rollout up to 4000 differently perturbed policies in parallel.
This explores the policy space effectively and large batches drastically reduce the variance of the resulting gradients.


June 13, 2025 at 11:50 AM
📈 Massive Scaling Pays Off
We see strong scaling effects when using MJX to rollout up to 4000 differently perturbed policies in parallel.
This explores the policy space effectively and large batches drastically reduce the variance of the resulting gradients.
We see strong scaling effects when using MJX to rollout up to 4000 differently perturbed policies in parallel.
This explores the policy space effectively and large batches drastically reduce the variance of the resulting gradients.
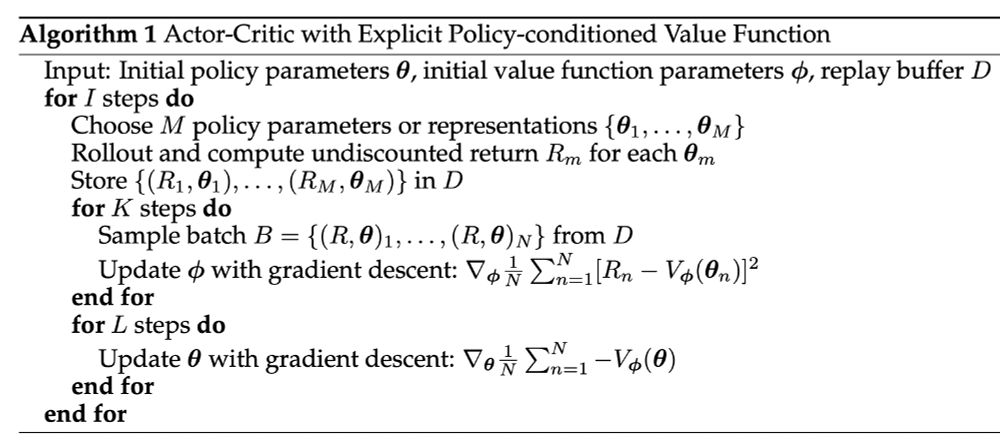
🧠 Simple & Powerful RL
This unlocks fully off-policy learning and policy parameter space exploration using any policy data and leads to the probably most simple DRL algorithm one can imagine:
This unlocks fully off-policy learning and policy parameter space exploration using any policy data and leads to the probably most simple DRL algorithm one can imagine:
June 13, 2025 at 11:50 AM
🧠 Simple & Powerful RL
This unlocks fully off-policy learning and policy parameter space exploration using any policy data and leads to the probably most simple DRL algorithm one can imagine:
This unlocks fully off-policy learning and policy parameter space exploration using any policy data and leads to the probably most simple DRL algorithm one can imagine:
🔍 What are EPVFs?
Imagine a value function that understands the policy's parameters directly: V(θ).
This allows for direct, gradient-based policy updates:
Imagine a value function that understands the policy's parameters directly: V(θ).
This allows for direct, gradient-based policy updates:

June 13, 2025 at 11:50 AM
🔍 What are EPVFs?
Imagine a value function that understands the policy's parameters directly: V(θ).
This allows for direct, gradient-based policy updates:
Imagine a value function that understands the policy's parameters directly: V(θ).
This allows for direct, gradient-based policy updates:
Many thanks to my colleagues and collaborators: Daniel Palenicek, Łukasz Antczak, @jan-peters.bsky.social and most importantly Jonathan Kinzel (@ibims1jfk.bsky.social), who interned at MAB Robotics and did the experiments.
Also thanks to MAB Robotics for providing the hardware and constant support!
Also thanks to MAB Robotics for providing the hardware and constant support!
March 18, 2025 at 10:24 PM
Many thanks to my colleagues and collaborators: Daniel Palenicek, Łukasz Antczak, @jan-peters.bsky.social and most importantly Jonathan Kinzel (@ibims1jfk.bsky.social), who interned at MAB Robotics and did the experiments.
Also thanks to MAB Robotics for providing the hardware and constant support!
Also thanks to MAB Robotics for providing the hardware and constant support!
We build on the efficient CrossQ DRL algorithm and combine it with two control architectures — Joint Target Prediction for agile maneuvers and Central Pattern Generators for stable, natural gaits — to train locomotion policies directly on the HoneyBadger quadruped robot from MAB Robotics.

March 18, 2025 at 10:24 PM
We build on the efficient CrossQ DRL algorithm and combine it with two control architectures — Joint Target Prediction for agile maneuvers and Central Pattern Generators for stable, natural gaits — to train locomotion policies directly on the HoneyBadger quadruped robot from MAB Robotics.