



Michael Burke
@mgb45.bsky.social
Roboticist at Monash University, Melbourne.
Our ARC DP on Skillphabets for robot tool use was funded!
We will have two PhD positions open on this grant (dextrous manipulation with reusable skills, human-robot information asymmetry) and a postdoc (learning skill decomposition from demonstrations). Drop me a message if you are interested.
We will have two PhD positions open on this grant (dextrous manipulation with reusable skills, human-robot information asymmetry) and a postdoc (learning skill decomposition from demonstrations). Drop me a message if you are interested.

Translation for last year PhD students: You want to watch the ARC webpage tomorrow to see who will be looking for postdocs in 2026

ARC says Discovery Projects outcomes will be tomorrow (Tuesday). Linkage Projects (2025, round 1) on Wed. Over past ~year, it's often been at about 11am (Canberra).
My bot will pick up the change to RMS & post immediately.
ARC should email outcomes to lead CIs, but might take an 1hr or so for DPs
My bot will pick up the change to RMS & post immediately.
ARC should email outcomes to lead CIs, but might take an 1hr or so for DPs
October 28, 2025 at 2:24 AM
Our ARC DP on Skillphabets for robot tool use was funded!
We will have two PhD positions open on this grant (dextrous manipulation with reusable skills, human-robot information asymmetry) and a postdoc (learning skill decomposition from demonstrations). Drop me a message if you are interested.
We will have two PhD positions open on this grant (dextrous manipulation with reusable skills, human-robot information asymmetry) and a postdoc (learning skill decomposition from demonstrations). Drop me a message if you are interested.
Reposted by Michael Burke

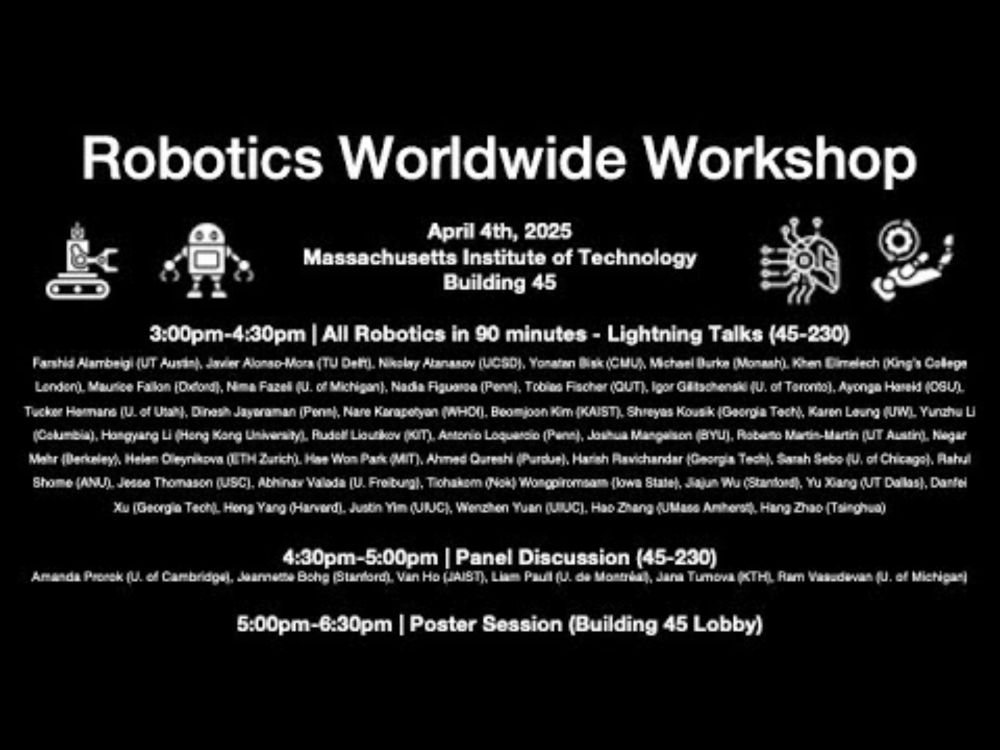
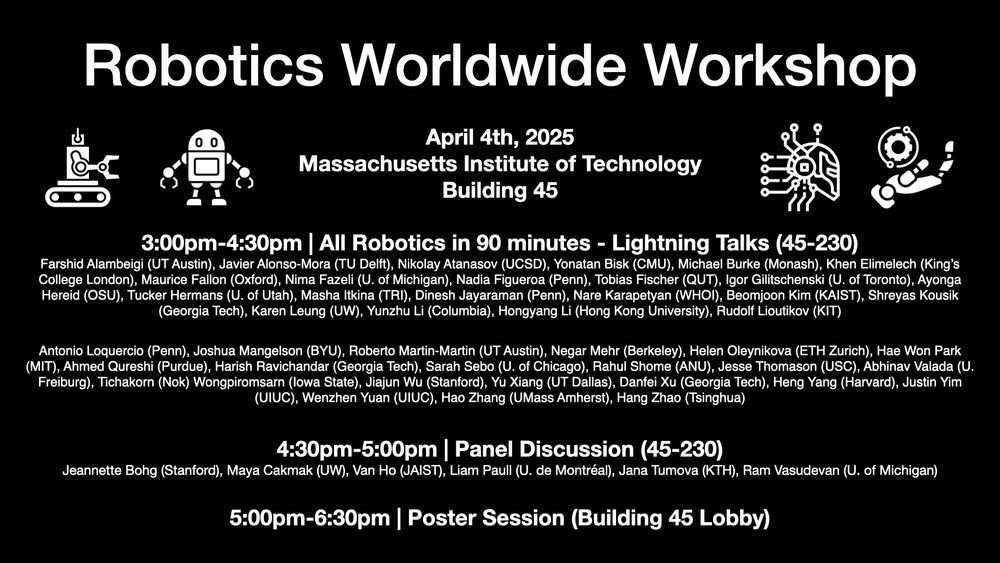
Here is the recording of the Robotics Worldwide Workshop, held at MIT on April 4, 2025: www.youtube.com/watch?v=0OdO... - includes "All Robotics in 90 minutes" lightning talks and a panel discussion on the future of robotics. not for the faint of heart. #mitSparkLab @mitofficial.bsky.social
MIT Robotics - Robotics Worldwide Workshop
YouTube video by MIT Robotics
www.youtube.com
April 27, 2025 at 4:12 PM
Here is the recording of the Robotics Worldwide Workshop, held at MIT on April 4, 2025: www.youtube.com/watch?v=0OdO... - includes "All Robotics in 90 minutes" lightning talks and a panel discussion on the future of robotics. not for the faint of heart. #mitSparkLab @mitofficial.bsky.social
Reposted by Michael Burke

Ending the #RSS AC meeting on a high note with @mgb45.bsky.social, Rudolf Lioutikov, Jana Tumova, and Abhinav Valada. Can’t wait to see all of you again soon!



April 6, 2025 at 5:50 PM
Ending the #RSS AC meeting on a high note with @mgb45.bsky.social, Rudolf Lioutikov, Jana Tumova, and Abhinav Valada. Can’t wait to see all of you again soon!
This was a lot of fun! Livestream seems to now be a recording of you want to watch.
🚨breaking robotics news🚨 We’re thrilled to announce that the MIT Robotics Worldwide Workshop (happening today, April 4, 3-5pm EST) will be livestreamed. You can watch the lightning talks and panel here for free web.mit.edu/webcast/robo...
#MITRobotics #Innovation #TechLiveStream
#MITRobotics #Innovation #TechLiveStream
LIVE WEBCAST - MIT ROBOTICS
web.mit.edu
April 5, 2025 at 12:14 PM
This was a lot of fun! Livestream seems to now be a recording of you want to watch.
Reposted by Michael Burke
I'm very excited to host the Robotics Worldwide Workshop at MIT with Amanda Prorok next week! We have an incredible lineup of roboticists from around the world who will join us for lightning talks, a panel discussion, and a poster session. Join us if you are in the area!
March 28, 2025 at 7:33 PM
I'm very excited to host the Robotics Worldwide Workshop at MIT with Amanda Prorok next week! We have an incredible lineup of roboticists from around the world who will join us for lightning talks, a panel discussion, and a poster session. Join us if you are in the area!
Reposted by Michael Burke
Here's how I used up all my Sora credits.
First, my number one most impossible video model benchmark, "person blowing out a candle"
First, my number one most impossible video model benchmark, "person blowing out a candle"
December 11, 2024 at 10:00 PM
Here's how I used up all my Sora credits.
First, my number one most impossible video model benchmark, "person blowing out a candle"
First, my number one most impossible video model benchmark, "person blowing out a candle"
Reposted by Michael Burke

3 days of keynotes, 10-min paper talks, and 1-min spotlights on the latest research, all free and open to anyone interested! Conference on Robot Learning (CoRL) talks are now online:
youtube.com/watch?v=0joZwi…#Roboticsc#DeepLearningn#CoRL202424
youtube.com/watch?v=0joZwi…#Roboticsc#DeepLearningn#CoRL202424
YouTube
Share your videos with friends, family, and the world
https://youtube.com/watch?v=0joZwi…
November 26, 2024 at 4:13 AM
3 days of keynotes, 10-min paper talks, and 1-min spotlights on the latest research, all free and open to anyone interested! Conference on Robot Learning (CoRL) talks are now online:
youtube.com/watch?v=0joZwi…#Roboticsc#DeepLearningn#CoRL202424
youtube.com/watch?v=0joZwi…#Roboticsc#DeepLearningn#CoRL202424
Reposted by Michael Burke

Adding my love letter to
arxiv.org/pdf/2304.01315
Empirical Design in Reinforcement Learning
by
Andrew Patterson, Samuel Neumann, Martha White, Adam White
JMLR 25 (2024) 1-63
#ReinforcementLearning
These aren’t the heroes we deserve, but they are the heroes we need.
arxiv.org/pdf/2304.01315
Empirical Design in Reinforcement Learning
by
Andrew Patterson, Samuel Neumann, Martha White, Adam White
JMLR 25 (2024) 1-63
#ReinforcementLearning
These aren’t the heroes we deserve, but they are the heroes we need.
arxiv.org
November 23, 2024 at 1:40 PM
Adding my love letter to
arxiv.org/pdf/2304.01315
Empirical Design in Reinforcement Learning
by
Andrew Patterson, Samuel Neumann, Martha White, Adam White
JMLR 25 (2024) 1-63
#ReinforcementLearning
These aren’t the heroes we deserve, but they are the heroes we need.
arxiv.org/pdf/2304.01315
Empirical Design in Reinforcement Learning
by
Andrew Patterson, Samuel Neumann, Martha White, Adam White
JMLR 25 (2024) 1-63
#ReinforcementLearning
These aren’t the heroes we deserve, but they are the heroes we need.
Reposted by Michael Burke

You can use this feed to get only mentions bsky.app/profile/did:...
November 19, 2024 at 11:26 PM
You can use this feed to get only mentions bsky.app/profile/did:...
Challenge accepted! Our incredible undergrads have just released a new open quadruped for you to make at home.
youtu.be/vo-NXgQ52jU?...
github.com/MonashRoboti...
youtu.be/vo-NXgQ52jU?...
github.com/MonashRoboti...
November 15, 2024 at 4:50 AM
Challenge accepted! Our incredible undergrads have just released a new open quadruped for you to make at home.
youtu.be/vo-NXgQ52jU?...
github.com/MonashRoboti...
youtu.be/vo-NXgQ52jU?...
github.com/MonashRoboti...
Reposted by Michael Burke

The Onion should buy Elsevier next
November 14, 2024 at 8:28 PM
The Onion should buy Elsevier next
Reposted by Michael Burke

This is great!

Unitree G1 Open Source Dataset
Unitree G1 robot operation data set is open sourced, adapted to a variety of open source solutions, and continuously updated.
Unitree G1 robot operation data set is open sourced, adapted to a variety of open source solutions, and continuously updated.
November 12, 2024 at 8:11 PM
This is great!
Looking for an exciting industry collaboration postdoc in intelligent robotics for pharmaceutical applications? Come join us if you're keen to explore human-in-the-loop simulation and digital twins! lnkd.in/gBXFr4Hn
Job Search
careers.pageuppeople.com
October 11, 2024 at 7:29 AM
Looking for an exciting industry collaboration postdoc in intelligent robotics for pharmaceutical applications? Come join us if you're keen to explore human-in-the-loop simulation and digital twins! lnkd.in/gBXFr4Hn