


Harsh Mahesheka
@harshmahesheka.bsky.social
Tinkering with bots and brains 🛠️🤖 | EE @ IIT BHU 🎓 | Previous Robot Learning @ Uni Freiburg, ASU, IIIT-H | GSoC '22 @ Open Robotics | Teaching bots to fetch me a beer 🍺
Visit me at - https://harshmahesheka.github.io/
Visit me at - https://harshmahesheka.github.io/
You just witnessed the birth of Skynet
November 24, 2024 at 8:48 AM
You just witnessed the birth of Skynet
Great list!! Could you add me?
I work on Multi-Agent Reinforcement Learning and it's applications in robotics. Would love to connect with community.
I work on Multi-Agent Reinforcement Learning and it's applications in robotics. Would love to connect with community.
November 23, 2024 at 12:58 PM
Great list!! Could you add me?
I work on Multi-Agent Reinforcement Learning and it's applications in robotics. Would love to connect with community.
I work on Multi-Agent Reinforcement Learning and it's applications in robotics. Would love to connect with community.
Love to get added!!
A few of my open source projects 🤖-
1. Mesa_RL- github.com/projectmesa/...
2. Household Bot - github.com/harshmaheshe...
3. Gazebo Pkg_Create - github.com/gazebosim/gz...
A few of my open source projects 🤖-
1. Mesa_RL- github.com/projectmesa/...
2. Household Bot - github.com/harshmaheshe...
3. Gazebo Pkg_Create - github.com/gazebosim/gz...
mesa-examples/rl at main · projectmesa/mesa-examples
User and showcase agent-based models developed using Mesa - projectmesa/mesa-examples
github.com
November 23, 2024 at 12:53 PM
Love to get added!!
A few of my open source projects 🤖-
1. Mesa_RL- github.com/projectmesa/...
2. Household Bot - github.com/harshmaheshe...
3. Gazebo Pkg_Create - github.com/gazebosim/gz...
A few of my open source projects 🤖-
1. Mesa_RL- github.com/projectmesa/...
2. Household Bot - github.com/harshmaheshe...
3. Gazebo Pkg_Create - github.com/gazebosim/gz...
Great List! Would love to be added and connect with the community.
November 23, 2024 at 7:29 AM
Great List! Would love to be added and connect with the community.
I work in robot learning. Would love to be added in the list.
November 21, 2024 at 10:24 PM
I work in robot learning. Would love to be added in the list.
Hello👋, Would love to be added.
November 21, 2024 at 10:22 PM
Hello👋, Would love to be added.
Hi, Thanks for the list.
Would love to be added to this list. I work on robot learning and its applications.
Would love to be added to this list. I work on robot learning and its applications.
November 21, 2024 at 10:07 PM
Hi, Thanks for the list.
Would love to be added to this list. I work on robot learning and its applications.
Would love to be added to this list. I work on robot learning and its applications.
November 21, 2024 at 9:59 PM
By chaining a VLM and LLM in a bi-level framework, we use the “chain rule” to guide reward search directly from video demos.
This work was done under guidance of Prof. Wanxin Jin and Prof. Zhorang Wang at Intelligent Robotics and Interactive Systems (IRIS) Lab, Arizona State University.
This work was done under guidance of Prof. Wanxin Jin and Prof. Zhorang Wang at Intelligent Robotics and Interactive Systems (IRIS) Lab, Arizona State University.
November 21, 2024 at 7:39 PM
By chaining a VLM and LLM in a bi-level framework, we use the “chain rule” to guide reward search directly from video demos.
This work was done under guidance of Prof. Wanxin Jin and Prof. Zhorang Wang at Intelligent Robotics and Interactive Systems (IRIS) Lab, Arizona State University.
This work was done under guidance of Prof. Wanxin Jin and Prof. Zhorang Wang at Intelligent Robotics and Interactive Systems (IRIS) Lab, Arizona State University.
This was work with my great colleagues Harsh Mahesheka, Jan Ole von Hartz, Tim Welschehold and Abhinav Valada at the Technische Fakultät der Universität Freiburg, University of Freiburg.
November 21, 2024 at 7:21 PM
This was work with my great colleagues Harsh Mahesheka, Jan Ole von Hartz, Tim Welschehold and Abhinav Valada at the Technische Fakultät der Universität Freiburg, University of Freiburg.
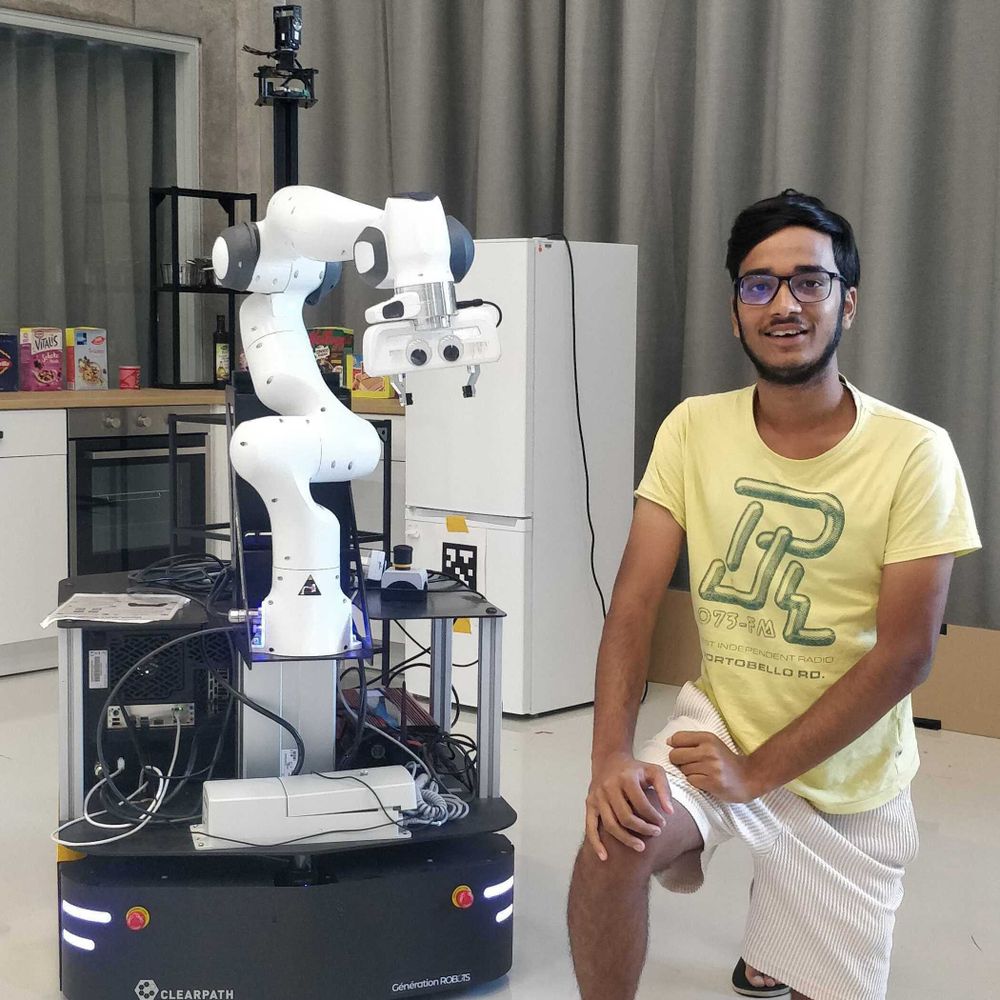
By modularizing commands, the operator can fully focus on the task relevant end-effector motions. This even enables kinesthetic teaching of mobile manipulators in cluttered environments. We show that this allows us to rapidly learn whole-body mobile manipulation skills with less than ten minutes.
November 21, 2024 at 7:21 PM
By modularizing commands, the operator can fully focus on the task relevant end-effector motions. This even enables kinesthetic teaching of mobile manipulators in cluttered environments. We show that this allows us to rapidly learn whole-body mobile manipulation skills with less than ten minutes.