


Gaspard Lambrechts
@gsprd.be
PhD Student doing RL in POMDP at the University of Liège - Intern at McGill - gsprd.be
Interestingly, this distribution can be learned from off-policy samples with a TD-like update. And this, even when encouraging the visitation of features of future states (possibly aliased).
arxiv.org/abs/2412.06655
arxiv.org/abs/2412.06655

Off-Policy Maximum Entropy RL with Future State and Action Visitation Measures
Maximum entropy reinforcement learning integrates exploration into policy learning by providing additional intrinsic rewards proportional to the entropy of some distribution. In this paper, we propose...
arxiv.org
October 6, 2025 at 9:50 AM
Interestingly, this distribution can be learned from off-policy samples with a TD-like update. And this, even when encouraging the visitation of features of future states (possibly aliased).
arxiv.org/abs/2412.06655
arxiv.org/abs/2412.06655
4) Off-Policy Maximum Entropy RL with Future State and Action Visitation Measures.
With Adrien Bolland and Damien Ernst, we propose a new intrinsic reward. Instead of encouraging visiting states uniformly, we encourage visiting *future* states uniformly, from every state.
With Adrien Bolland and Damien Ernst, we propose a new intrinsic reward. Instead of encouraging visiting states uniformly, we encourage visiting *future* states uniformly, from every state.
October 6, 2025 at 9:50 AM
4) Off-Policy Maximum Entropy RL with Future State and Action Visitation Measures.
With Adrien Bolland and Damien Ernst, we propose a new intrinsic reward. Instead of encouraging visiting states uniformly, we encourage visiting *future* states uniformly, from every state.
With Adrien Bolland and Damien Ernst, we propose a new intrinsic reward. Instead of encouraging visiting states uniformly, we encourage visiting *future* states uniformly, from every state.
This view offers interesting insights for the design of intrinsic rewards, by providing four criteria.
arxiv.org/abs/2402.00162
arxiv.org/abs/2402.00162
Behind the Myth of Exploration in Policy Gradients
In order to compute near-optimal policies with policy-gradient algorithms, it is common in practice to include intrinsic exploration terms in the learning objective. Although the effectiveness of thes...
arxiv.org
October 6, 2025 at 9:50 AM
This view offers interesting insights for the design of intrinsic rewards, by providing four criteria.
arxiv.org/abs/2402.00162
arxiv.org/abs/2402.00162
3) Behind the Myth of Exploration in Policy Gradients.
With Adrien Bolland and Damien Ernst, we decided to frame the exploration problem for policy-gradient methods from the optimization point of view.
With Adrien Bolland and Damien Ernst, we decided to frame the exploration problem for policy-gradient methods from the optimization point of view.
October 6, 2025 at 9:50 AM
3) Behind the Myth of Exploration in Policy Gradients.
With Adrien Bolland and Damien Ernst, we decided to frame the exploration problem for policy-gradient methods from the optimization point of view.
With Adrien Bolland and Damien Ernst, we decided to frame the exploration problem for policy-gradient methods from the optimization point of view.
By adapting a finite-time bound, we uncover an interesting tradeoff between informativeness of the additional information and complexity of the resulting value function.
openreview.net/forum?id=wNV...
openreview.net/forum?id=wNV...
Informed Asymmetric Actor-Critic: Theoretical Insights and Open...
Reinforcement learning in partially observable environments requires agents to make decisions under uncertainty, based on incomplete and noisy observations. Asymmetric actor-critic methods improve...
openreview.net
October 6, 2025 at 9:50 AM
By adapting a finite-time bound, we uncover an interesting tradeoff between informativeness of the additional information and complexity of the resulting value function.
openreview.net/forum?id=wNV...
openreview.net/forum?id=wNV...
2) Informed Asymmetric Actor-Critic: Theoretical Insights and Open Questions.
With Daniel Ebi and Damien Ernst, we looked for a reason why asymmetric actor-critic was performing better, even when using RNN-based policies with the full observation history as input (no aliasing).
With Daniel Ebi and Damien Ernst, we looked for a reason why asymmetric actor-critic was performing better, even when using RNN-based policies with the full observation history as input (no aliasing).
October 6, 2025 at 9:50 AM
2) Informed Asymmetric Actor-Critic: Theoretical Insights and Open Questions.
With Daniel Ebi and Damien Ernst, we looked for a reason why asymmetric actor-critic was performing better, even when using RNN-based policies with the full observation history as input (no aliasing).
With Daniel Ebi and Damien Ernst, we looked for a reason why asymmetric actor-critic was performing better, even when using RNN-based policies with the full observation history as input (no aliasing).
In AsymAC, while the policy maintains an agent state based on observations only, the critic also takes the state as input. Its better performance is linked to eventual "aliasing" in the agent state, hurting TD learning in the symmetric case only.
arxiv.org/abs/2501.19116
arxiv.org/abs/2501.19116
A Theoretical Justification for Asymmetric Actor-Critic Algorithms
In reinforcement learning for partially observable environments, many successful algorithms have been developed within the asymmetric learning paradigm. This paradigm leverages additional state inform...
arxiv.org
October 6, 2025 at 9:50 AM
In AsymAC, while the policy maintains an agent state based on observations only, the critic also takes the state as input. Its better performance is linked to eventual "aliasing" in the agent state, hurting TD learning in the symmetric case only.
arxiv.org/abs/2501.19116
arxiv.org/abs/2501.19116
1) A Theoretical Justification for Asymmetric Actor-Critic Algorithms.
With Damien Ernst and Aditya Mahajan, we looked for a reason why asymmetric actor-critic algorithms are performing better than their symmetric counterparts.
With Damien Ernst and Aditya Mahajan, we looked for a reason why asymmetric actor-critic algorithms are performing better than their symmetric counterparts.
October 6, 2025 at 9:50 AM
1) A Theoretical Justification for Asymmetric Actor-Critic Algorithms.
With Damien Ernst and Aditya Mahajan, we looked for a reason why asymmetric actor-critic algorithms are performing better than their symmetric counterparts.
With Damien Ernst and Aditya Mahajan, we looked for a reason why asymmetric actor-critic algorithms are performing better than their symmetric counterparts.
TL;DR: Do not make the problem harder than it is! Using state information during training is provably better.
📝 Paper: arxiv.org/abs/2501.19116
🎤 Talk: orbi.uliege.be/handle/2268/...
A warm thank to Aditya Mahajan for welcoming me at McGill University and for his precious supervision.
📝 Paper: arxiv.org/abs/2501.19116
🎤 Talk: orbi.uliege.be/handle/2268/...
A warm thank to Aditya Mahajan for welcoming me at McGill University and for his precious supervision.
A Theoretical Justification for Asymmetric Actor-Critic Algorithms
In reinforcement learning for partially observable environments, many successful algorithms have been developed within the asymmetric learning paradigm. This paradigm leverages additional state inform...
arxiv.org
June 9, 2025 at 2:43 PM
TL;DR: Do not make the problem harder than it is! Using state information during training is provably better.
📝 Paper: arxiv.org/abs/2501.19116
🎤 Talk: orbi.uliege.be/handle/2268/...
A warm thank to Aditya Mahajan for welcoming me at McGill University and for his precious supervision.
📝 Paper: arxiv.org/abs/2501.19116
🎤 Talk: orbi.uliege.be/handle/2268/...
A warm thank to Aditya Mahajan for welcoming me at McGill University and for his precious supervision.
While this work has considered fixed feature z = f(h) with linear approximators, we discuss possible generalizations in the conclusion.
Despite not matching the usual recurrent actor-critic setting, this analysis still provides insights into the effectiveness of asymmetric actor-critic algorithms.
Despite not matching the usual recurrent actor-critic setting, this analysis still provides insights into the effectiveness of asymmetric actor-critic algorithms.
June 9, 2025 at 2:43 PM
While this work has considered fixed feature z = f(h) with linear approximators, we discuss possible generalizations in the conclusion.
Despite not matching the usual recurrent actor-critic setting, this analysis still provides insights into the effectiveness of asymmetric actor-critic algorithms.
Despite not matching the usual recurrent actor-critic setting, this analysis still provides insights into the effectiveness of asymmetric actor-critic algorithms.
The conclusion is that asymmetric learning is less sensitive to aliasing than symmetric learning.
Now, what is aliasing exactly?
The aliasing and inference terms arise from z = f(h) not being Markovian. They can be bounded by the difference between the approximate p(s|z) and exact p(s|h) beliefs.
Now, what is aliasing exactly?
The aliasing and inference terms arise from z = f(h) not being Markovian. They can be bounded by the difference between the approximate p(s|z) and exact p(s|h) beliefs.
June 9, 2025 at 2:43 PM
The conclusion is that asymmetric learning is less sensitive to aliasing than symmetric learning.
Now, what is aliasing exactly?
The aliasing and inference terms arise from z = f(h) not being Markovian. They can be bounded by the difference between the approximate p(s|z) and exact p(s|h) beliefs.
Now, what is aliasing exactly?
The aliasing and inference terms arise from z = f(h) not being Markovian. They can be bounded by the difference between the approximate p(s|z) and exact p(s|h) beliefs.
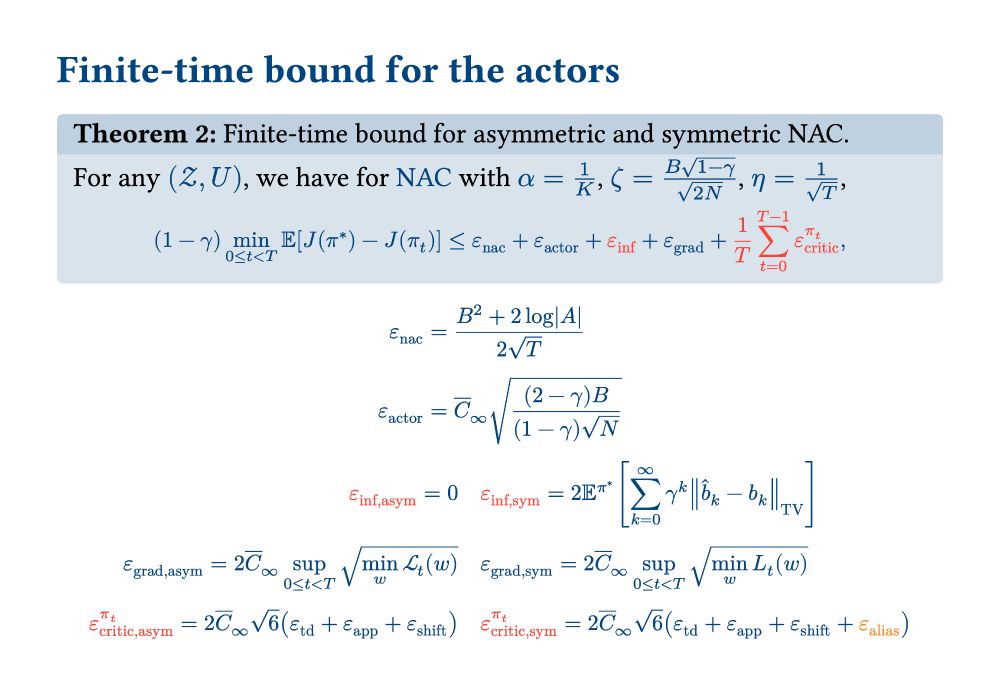
Now, as far as the actor suboptimality is concerned, we obtained the following finite-time bounds.
In addition to the average critic error, which is also present in the actor bound, the symmetric actor-critic algorithm suffers from an additional "inference term".
In addition to the average critic error, which is also present in the actor bound, the symmetric actor-critic algorithm suffers from an additional "inference term".
June 9, 2025 at 2:43 PM
Now, as far as the actor suboptimality is concerned, we obtained the following finite-time bounds.
In addition to the average critic error, which is also present in the actor bound, the symmetric actor-critic algorithm suffers from an additional "inference term".
In addition to the average critic error, which is also present in the actor bound, the symmetric actor-critic algorithm suffers from an additional "inference term".
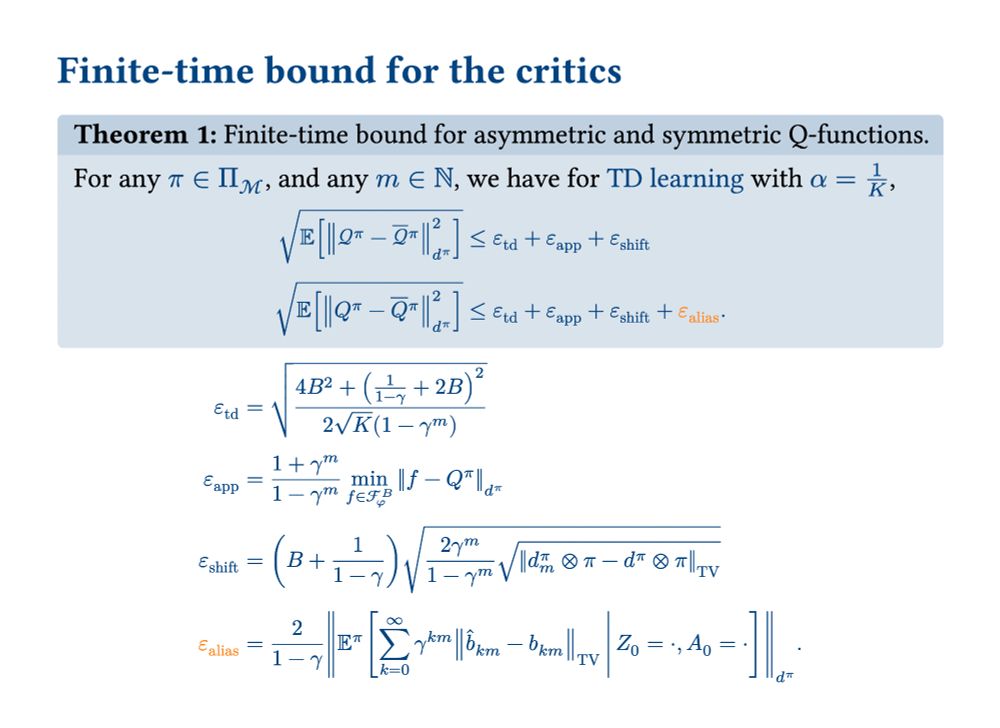
By adapting the finite-time bound from the symmetric setting to the asymmetric setting, we obtain the following error bounds for the critic estimates.
The symmetric temporal difference learning algorithm has an additional "aliasing term".
The symmetric temporal difference learning algorithm has an additional "aliasing term".
June 9, 2025 at 2:43 PM
By adapting the finite-time bound from the symmetric setting to the asymmetric setting, we obtain the following error bounds for the critic estimates.
The symmetric temporal difference learning algorithm has an additional "aliasing term".
The symmetric temporal difference learning algorithm has an additional "aliasing term".
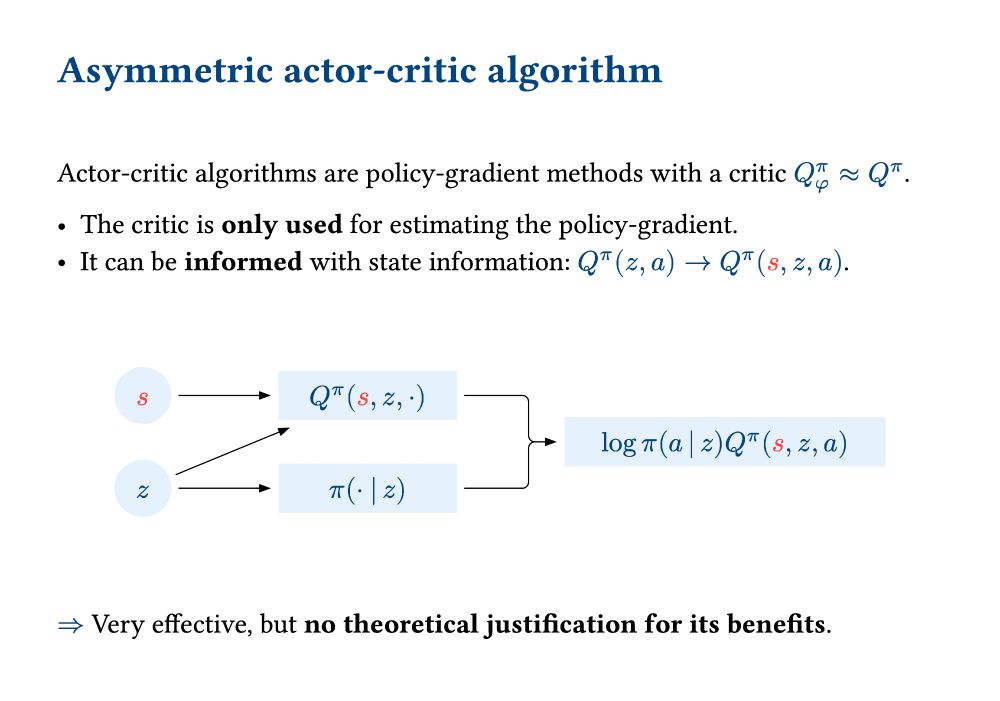
While this algorithm is valid/unbiased (Baisero & Amato, 2022), a theoretical justification for its benefit is still missing.
Does it really learn faster than symmetric learning?
In this paper, we provide theoretical evidence for this, based on an adapted finite-time analysis (Cayci et al., 2024).
Does it really learn faster than symmetric learning?
In this paper, we provide theoretical evidence for this, based on an adapted finite-time analysis (Cayci et al., 2024).
June 9, 2025 at 2:43 PM
While this algorithm is valid/unbiased (Baisero & Amato, 2022), a theoretical justification for its benefit is still missing.
Does it really learn faster than symmetric learning?
In this paper, we provide theoretical evidence for this, based on an adapted finite-time analysis (Cayci et al., 2024).
Does it really learn faster than symmetric learning?
In this paper, we provide theoretical evidence for this, based on an adapted finite-time analysis (Cayci et al., 2024).
However, with actor-critic algorithms, it can be noticed that the critic is not needed at execution!
As a result, the state can be an input of the critic, which becomes Q(s, z, a) in the asymmetric setting instead of Q(z, a) in the symmetric setting.
As a result, the state can be an input of the critic, which becomes Q(s, z, a) in the asymmetric setting instead of Q(z, a) in the symmetric setting.
June 9, 2025 at 2:43 PM
However, with actor-critic algorithms, it can be noticed that the critic is not needed at execution!
As a result, the state can be an input of the critic, which becomes Q(s, z, a) in the asymmetric setting instead of Q(z, a) in the symmetric setting.
As a result, the state can be an input of the critic, which becomes Q(s, z, a) in the asymmetric setting instead of Q(z, a) in the symmetric setting.
In a POMDP, the goal is to find an optimal policy π(a|z) that maps a feature z = f(h) of the history h to an action a.
In a privileged POMDP, the state can be used to learn a policy π(a|z) faster.
But note that the state cannot be an input of the policy, since it is not available at execution.
In a privileged POMDP, the state can be used to learn a policy π(a|z) faster.
But note that the state cannot be an input of the policy, since it is not available at execution.

June 9, 2025 at 2:43 PM
In a POMDP, the goal is to find an optimal policy π(a|z) that maps a feature z = f(h) of the history h to an action a.
In a privileged POMDP, the state can be used to learn a policy π(a|z) faster.
But note that the state cannot be an input of the policy, since it is not available at execution.
In a privileged POMDP, the state can be used to learn a policy π(a|z) faster.
But note that the state cannot be an input of the policy, since it is not available at execution.
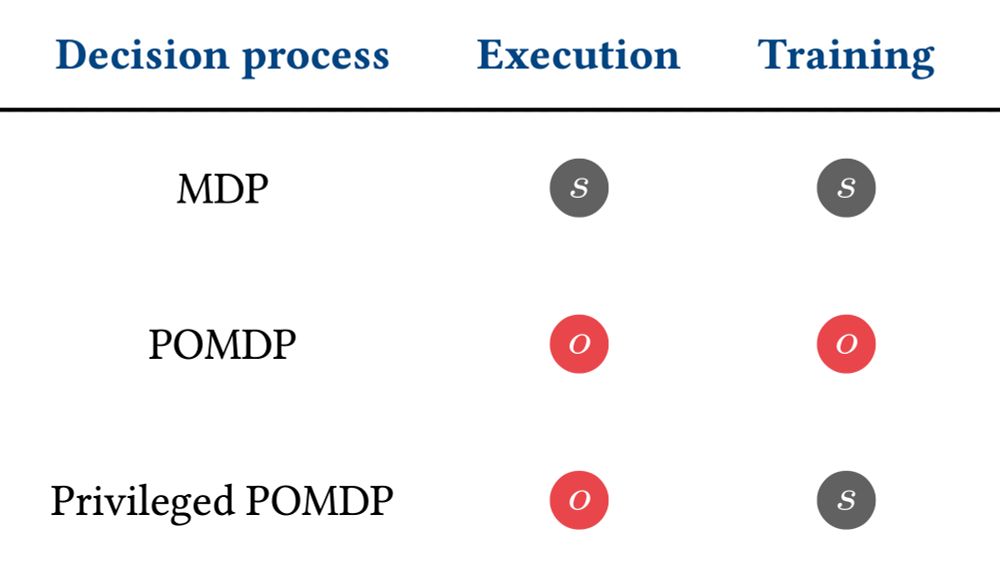
Typically, classical RL methods assume:
- MDP: full state observability (too optimistic),
- POMDP: partial state observability (too pessimistic).
Instead, asymmetric RL methods assume:
- Privileged POMDP: asymmetric state observability (full at training, partial at execution).
- MDP: full state observability (too optimistic),
- POMDP: partial state observability (too pessimistic).
Instead, asymmetric RL methods assume:
- Privileged POMDP: asymmetric state observability (full at training, partial at execution).
June 9, 2025 at 2:43 PM
Typically, classical RL methods assume:
- MDP: full state observability (too optimistic),
- POMDP: partial state observability (too pessimistic).
Instead, asymmetric RL methods assume:
- Privileged POMDP: asymmetric state observability (full at training, partial at execution).
- MDP: full state observability (too optimistic),
- POMDP: partial state observability (too pessimistic).
Instead, asymmetric RL methods assume:
- Privileged POMDP: asymmetric state observability (full at training, partial at execution).