




FLATPAQ
@flatpaq.bsky.social




ここほんと狂ってて好き
www.elektronauts.com/t/roland-tr-...
www.elektronauts.com/t/roland-tr-...

October 1, 2025 at 9:10 AM
ここほんと狂ってて好き
www.elektronauts.com/t/roland-tr-...
www.elektronauts.com/t/roland-tr-...
Sketch Audio Blip Box、16パートどれも同じパラメーターを備えているドラムシンセ。色んな音が出せるしすごく良いんだけど、PAN振れないしプリセットの保存方法とかが独特で、時々GUIがもたついたり上手く動作しなかったりと使い勝手でもう一歩というところがある。ので音色を変化させながらマルチサンプリングして使った方が良さそう。Tonv...。
September 17, 2025 at 10:52 AM
Sketch Audio Blip Box、16パートどれも同じパラメーターを備えているドラムシンセ。色んな音が出せるしすごく良いんだけど、PAN振れないしプリセットの保存方法とかが独特で、時々GUIがもたついたり上手く動作しなかったりと使い勝手でもう一歩というところがある。ので音色を変化させながらマルチサンプリングして使った方が良さそう。Tonv...。
Lofi-12 XTの出音含めた癖がだんだんわかってきた気がする。P-6の使い方はこれで合っているのかわからない。
September 5, 2025 at 12:41 PM
Lofi-12 XTの出音含めた癖がだんだんわかってきた気がする。P-6の使い方はこれで合っているのかわからない。
なんでカメラを起動したらカメラ目線になるんだろう。念能力者?

September 4, 2025 at 9:19 AM
なんでカメラを起動したらカメラ目線になるんだろう。念能力者?
Webブラウザで動く相対値エンコーダーのGUI(動かした量がわかりやすいようにあえて指示線を付けている)。
ポット(絶対値)タイプのように270度分回すと最小値から最大値まで取得できる。
無限回転タイプのため、最小値(この例だと0)からマイナス方向に、あるいは最大値(この例だと100)からプラス方向に回しても値は変化しない。
ポットのように回した位置で値が決まるのではなく、回した方向と角度の変化分によって値が増減する。
これを複数基用意してパラメーターごとにVueなどでデータバインドさせれば、ハードウェアスタイルのUIをRust+Wasm上で試すことができる。はず。
ポット(絶対値)タイプのように270度分回すと最小値から最大値まで取得できる。
無限回転タイプのため、最小値(この例だと0)からマイナス方向に、あるいは最大値(この例だと100)からプラス方向に回しても値は変化しない。
ポットのように回した位置で値が決まるのではなく、回した方向と角度の変化分によって値が増減する。
これを複数基用意してパラメーターごとにVueなどでデータバインドさせれば、ハードウェアスタイルのUIをRust+Wasm上で試すことができる。はず。
August 22, 2025 at 9:57 AM
Webブラウザで動く相対値エンコーダーのGUI(動かした量がわかりやすいようにあえて指示線を付けている)。
ポット(絶対値)タイプのように270度分回すと最小値から最大値まで取得できる。
無限回転タイプのため、最小値(この例だと0)からマイナス方向に、あるいは最大値(この例だと100)からプラス方向に回しても値は変化しない。
ポットのように回した位置で値が決まるのではなく、回した方向と角度の変化分によって値が増減する。
これを複数基用意してパラメーターごとにVueなどでデータバインドさせれば、ハードウェアスタイルのUIをRust+Wasm上で試すことができる。はず。
ポット(絶対値)タイプのように270度分回すと最小値から最大値まで取得できる。
無限回転タイプのため、最小値(この例だと0)からマイナス方向に、あるいは最大値(この例だと100)からプラス方向に回しても値は変化しない。
ポットのように回した位置で値が決まるのではなく、回した方向と角度の変化分によって値が増減する。
これを複数基用意してパラメーターごとにVueなどでデータバインドさせれば、ハードウェアスタイルのUIをRust+Wasm上で試すことができる。はず。
デザインはこれで一旦区切りで後はなぜかiPadだとたまに変な挙動があったのでそこを何とかしたい。

August 17, 2025 at 7:49 AM
デザインはこれで一旦区切りで後はなぜかiPadだとたまに変な挙動があったのでそこを何とかしたい。

Web Audio APIのドキュメントはMDNに網羅されているものの実践的なTipsは書籍含めあまり見当たらなかったので、AI(今回はGemini)に実際に動くサンプルコードを生成してもらって質問しながら学ぶことができたのは大きい。特に時間管理系の処理とか独学だと絶対に行き詰まってたと思う。
まだPWMとかGlideとか実装していないけど後は細かいところを修正していくくらいにしようかな。今後はRustに移行したい。
まだPWMとかGlideとか実装していないけど後は細かいところを修正していくくらいにしようかな。今後はRustに移行したい。

August 16, 2025 at 10:52 AM
Web Audio APIのドキュメントはMDNに網羅されているものの実践的なTipsは書籍含めあまり見当たらなかったので、AI(今回はGemini)に実際に動くサンプルコードを生成してもらって質問しながら学ぶことができたのは大きい。特に時間管理系の処理とか独学だと絶対に行き詰まってたと思う。
まだPWMとかGlideとか実装していないけど後は細かいところを修正していくくらいにしようかな。今後はRustに移行したい。
まだPWMとかGlideとか実装していないけど後は細かいところを修正していくくらいにしようかな。今後はRustに移行したい。
Webブラウザで動くシンセを作ってみた。割とWeb Audio APIそのままなんだけど結構良い音。
August 16, 2025 at 10:42 AM
Webブラウザで動くシンセを作ってみた。割とWeb Audio APIそのままなんだけど結構良い音。


横3px縦5pxと、横3px縦4pxのも作ってみた。とりわけ前者と同じサイズのはELEKTRONにもあるけど、0とO、5とSが全く同じ形で区別が付かないのが辛そうなので、それを踏まえて違いを付けてみた。横3pxではもうWやMは潰れざるを得ない。


June 22, 2025 at 5:17 AM
横3px縦5pxと、横3px縦4pxのも作ってみた。とりわけ前者と同じサイズのはELEKTRONにもあるけど、0とO、5とSが全く同じ形で区別が付かないのが辛そうなので、それを踏まえて違いを付けてみた。横3pxではもうWやMは潰れざるを得ない。
止め時がわからなくなってきた。等幅フォントでないのなら大文字もなるべくスリムな方がいいのかも。


June 21, 2025 at 7:10 AM
止め時がわからなくなってきた。等幅フォントでないのなら大文字もなるべくスリムな方がいいのかも。
小文字のgはこの方が読みやすいかも。明らかに9と区別化できてる気がする。


June 20, 2025 at 11:19 AM
小文字のgはこの方が読みやすいかも。明らかに9と区別化できてる気がする。
少し形を修正した。小文字のsとか作成中に間近で見てると全くsに見えないけど、目を離すとそれっぽく見えてくるから不思議だ。

June 19, 2025 at 3:33 AM
少し形を修正した。小文字のsとか作成中に間近で見てると全くsに見えないけど、目を離すとそれっぽく見えてくるから不思議だ。
5 x 5 pxまでが英数字の判読のしやすさの限界なような気がする。これ以上小さくすると文字を崩したり潰した上で、でも何となく読めてしまえる形にデザインする必要がありそう。このサイズでも9とgが結構怪しい。

June 18, 2025 at 2:26 PM
5 x 5 pxまでが英数字の判読のしやすさの限界なような気がする。これ以上小さくすると文字を崩したり潰した上で、でも何となく読めてしまえる形にデザインする必要がありそう。このサイズでも9とgが結構怪しい。
このてっぺんのアルミの円盤だけ売ってたりするけどどうやって取り付けるんだろう?

June 14, 2025 at 1:34 PM
このてっぺんのアルミの円盤だけ売ってたりするけどどうやって取り付けるんだろう?



May 23, 2025 at 5:04 PM
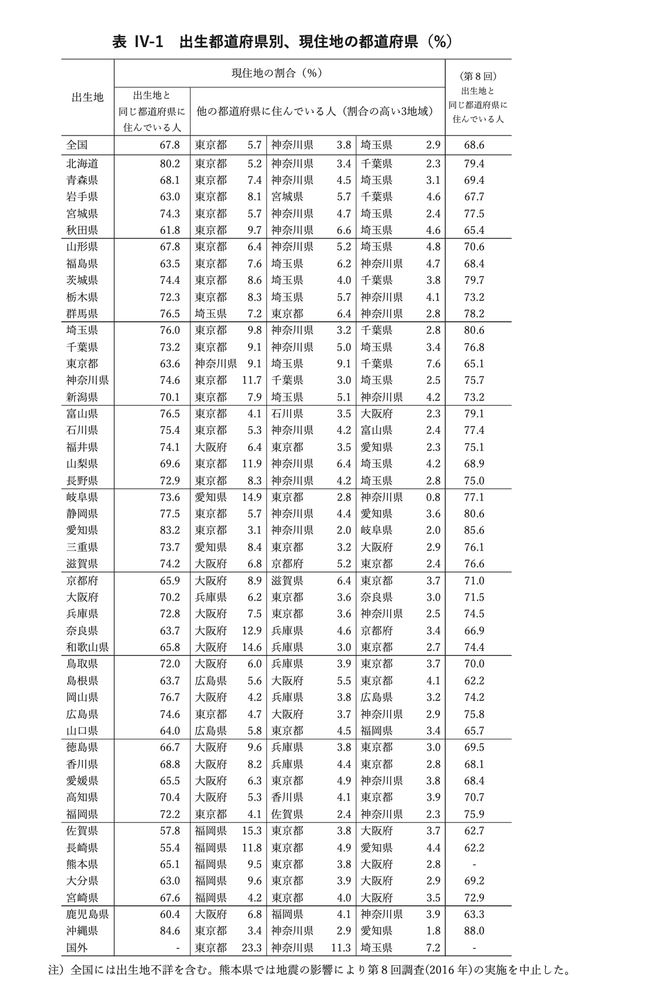
国土交通白書を読んだりしながらぼんやりと仮説を立てていたことが、人口移動調査の統計データとして裏付けられてて腹落ち。
(添付画像は第9回人口移動調査 報告書より引用)
www.e-stat.go.jp/stat-search/...
(添付画像は第9回人口移動調査 報告書より引用)
www.e-stat.go.jp/stat-search/...


May 23, 2025 at 3:39 PM
国土交通白書を読んだりしながらぼんやりと仮説を立てていたことが、人口移動調査の統計データとして裏付けられてて腹落ち。
(添付画像は第9回人口移動調査 報告書より引用)
www.e-stat.go.jp/stat-search/...
(添付画像は第9回人口移動調査 報告書より引用)
www.e-stat.go.jp/stat-search/...