


This is just so sad. The Create3 educational robot was the highest quality educational robot, with the most dedicated and qualified support team I have ever worked with in 47 years playing with robots.
November 8, 2025 at 11:26 PM
This is just so sad. The Create3 educational robot was the highest quality educational robot, with the most dedicated and qualified support team I have ever worked with in 47 years playing with robots.

New kind of #ERC721
#solidity #NFT #web3
IBindableToken: tokens that exist in multiple collections.
Stuff:
1. Incremental factory (CREATE3) for collections.
2. Main collection has seed 0, but don't need to be deployed now
3. Magical cross-collectional binding.
github.com/sebasky-eth/...
#solidity #NFT #web3
IBindableToken: tokens that exist in multiple collections.
Stuff:
1. Incremental factory (CREATE3) for collections.
2. Main collection has seed 0, but don't need to be deployed now
3. Magical cross-collectional binding.
github.com/sebasky-eth/...

GitHub - sebasky-eth/content-finance-contracts: Still expanded contracts and protocols for content tokenization. Become patron: https://opensea.io/collection/first-patrons
Still expanded contracts and protocols for content tokenization. Become patron: https://opensea.io/collection/first-patrons - sebasky-eth/content-finance-contracts
github.com
July 2, 2025 at 3:02 AM
New kind of #ERC721
#solidity #NFT #web3
IBindableToken: tokens that exist in multiple collections.
Stuff:
1. Incremental factory (CREATE3) for collections.
2. Main collection has seed 0, but don't need to be deployed now
3. Magical cross-collectional binding.
github.com/sebasky-eth/...
#solidity #NFT #web3
IBindableToken: tokens that exist in multiple collections.
Stuff:
1. Incremental factory (CREATE3) for collections.
2. Main collection has seed 0, but don't need to be deployed now
3. Magical cross-collectional binding.
github.com/sebasky-eth/...
USING = """ OSNIT """ .
WHICH """ EVERYONE RUNS TO CREATE3 WORLD WIDE MIS-INFFORMATION CAMPAIGNS """
/
NEVER BE FOOLED AGAIN !!!!!!!!!!!!!!
WHICH """ EVERYONE RUNS TO CREATE3 WORLD WIDE MIS-INFFORMATION CAMPAIGNS """
/
NEVER BE FOOLED AGAIN !!!!!!!!!!!!!!
June 29, 2025 at 7:14 PM
USING = """ OSNIT """ .
WHICH """ EVERYONE RUNS TO CREATE3 WORLD WIDE MIS-INFFORMATION CAMPAIGNS """
/
NEVER BE FOOLED AGAIN !!!!!!!!!!!!!!
WHICH """ EVERYONE RUNS TO CREATE3 WORLD WIDE MIS-INFFORMATION CAMPAIGNS """
/
NEVER BE FOOLED AGAIN !!!!!!!!!!!!!!
> one student is doing API Python
Shortly before iRobot fired the Education folk, I suggested to them to use the API Python, moving all ROS 2 to an external SBC/RaspberryPi. The Create3 internal processors hit a brick wall trying to keep up with ROS 2 message traffic (RMW) with vSLAM for me.
Shortly before iRobot fired the Education folk, I suggested to them to use the API Python, moving all ROS 2 to an external SBC/RaspberryPi. The Create3 internal processors hit a brick wall trying to keep up with ROS 2 message traffic (RMW) with vSLAM for me.
April 14, 2025 at 11:52 AM
> one student is doing API Python
Shortly before iRobot fired the Education folk, I suggested to them to use the API Python, moving all ROS 2 to an external SBC/RaspberryPi. The Create3 internal processors hit a brick wall trying to keep up with ROS 2 message traffic (RMW) with vSLAM for me.
Shortly before iRobot fired the Education folk, I suggested to them to use the API Python, moving all ROS 2 to an external SBC/RaspberryPi. The Create3 internal processors hit a brick wall trying to keep up with ROS 2 message traffic (RMW) with vSLAM for me.
Very cool. Prior year, I wrote a ROS2 node that broadcasts the 7 IR obstacle sensors values as a /scan topic and proved it can drive the mapping algorithm w/o LIDAR (possible because the Create3 fused odometry is so good)
github.com/iRobotEducat...
This was my node:
github.com/slowrunner/w...
github.com/iRobotEducat...
This was my node:
github.com/slowrunner/w...
Create3 WaLI : Wall follower Looking for Intelligence · iRobotEducation create3_docs · Discussion #472
Jump to latest update Create3 WaLi BLOG Terrible Turmoil Totally Too Talkative (in my head) After 7 years of working with my two GoPiGo3 robots, and that great community, I am way too overly excite...
github.com
April 14, 2025 at 11:45 AM
Very cool. Prior year, I wrote a ROS2 node that broadcasts the 7 IR obstacle sensors values as a /scan topic and proved it can drive the mapping algorithm w/o LIDAR (possible because the Create3 fused odometry is so good)
github.com/iRobotEducat...
This was my node:
github.com/slowrunner/w...
github.com/iRobotEducat...
This was my node:
github.com/slowrunner/w...

<a href="https://qiita.com/Z0E/items/4b55f5ffbca317e1349e" class="hover:underline text-blue-600 dark:text-sky-400 no-card-link" target="_blank" rel="noopener" data-link="bsky">qiita.com/Z0E/items...
ガ〇トの某ネコ型ロボットを10万円で作りたい - Qiita
- Create3をベースに、RGBDカメラとPCを搭載
- 3Dプリンター活用で低コスト、約10万円で作成可能
- Ubuntu, ROS環境構築と追加パーツで機能拡張を実現
ガ〇トの某ネコ型ロボットを10万円で作りたい - Qiita
- Create3をベースに、RGBDカメラとPCを搭載
- 3Dプリンター活用で低コスト、約10万円で作成可能
- Ubuntu, ROS環境構築と追加パーツで機能拡張を実現

ガ〇トの某ネコ型ロボットを10万円で作りたい - Qiita
「ガ〇トのネコ型配膳ロボットかわいいよね!研究で使いたい!」と思って値段を見たら〇〇〇万円...。本物は予算オーバーなのでそれっぽいものをお手軽に自作できないかと考えてみました。お掃除ロボットで有…
qiita.com
February 12, 2025 at 8:25 AM
<a href="https://qiita.com/Z0E/items/4b55f5ffbca317e1349e" class="hover:underline text-blue-600 dark:text-sky-400 no-card-link" target="_blank" rel="noopener" data-link="bsky">qiita.com/Z0E/items...
ガ〇トの某ネコ型ロボットを10万円で作りたい - Qiita
- Create3をベースに、RGBDカメラとPCを搭載
- 3Dプリンター活用で低コスト、約10万円で作成可能
- Ubuntu, ROS環境構築と追加パーツで機能拡張を実現
ガ〇トの某ネコ型ロボットを10万円で作りたい - Qiita
- Create3をベースに、RGBDカメラとPCを搭載
- 3Dプリンター活用で低コスト、約10万円で作成可能
- Ubuntu, ROS環境構築と追加パーツで機能拡張を実現

ほとんど iRobot Create3 代か。おもしろそうだが販売中止しちゃったのかあ……
ガ〇トの某ネコ型ロボットを10万円で作りたい - Qiita
ガ〇トの某ネコ型ロボットを10万円で作りたい - Qiita

ガ〇トの某ネコ型ロボットを10万円で作りたい - Qiita
「ガ〇トのネコ型配膳ロボットかわいいよね!研究で使いたい!」と思って値段を見たら〇〇〇万円...。本物は予算オーバーなのでそれっぽいものをお手軽に自作できないかと考えてみました。お掃除ロボットで有…
qiita.com
February 8, 2025 at 8:38 AM
ほとんど iRobot Create3 代か。おもしろそうだが販売中止しちゃったのかあ……
ガ〇トの某ネコ型ロボットを10万円で作りたい - Qiita
ガ〇トの某ネコ型ロボットを10万円で作りたい - Qiita

💡 Summary by GPT:
ガ〇トのネコ型ロボットを約10万円で自作する計画が紹介されています。iRobot社の教育用ロボット「Create3」を基に、RGBDカメラ(Intel RealSense D435i)と制御用PCを搭載する構成です。材料リストには、Create3やRealSense、その他の部品が含まれ、合計107,019円となります。手順としては、PCとCreate3のセットアップ、RealSenseのインストール、頭パーツの作成、ボディの取り付け、補助キャスターの取り付け、顔アニメーションの作成が含まれます。最終的に、 (1/2)
ガ〇トのネコ型ロボットを約10万円で自作する計画が紹介されています。iRobot社の教育用ロボット「Create3」を基に、RGBDカメラ(Intel RealSense D435i)と制御用PCを搭載する構成です。材料リストには、Create3やRealSense、その他の部品が含まれ、合計107,019円となります。手順としては、PCとCreate3のセットアップ、RealSenseのインストール、頭パーツの作成、ボディの取り付け、補助キャスターの取り付け、顔アニメーションの作成が含まれます。最終的に、 (1/2)
February 8, 2025 at 8:03 AM
💡 Summary by GPT:
ガ〇トのネコ型ロボットを約10万円で自作する計画が紹介されています。iRobot社の教育用ロボット「Create3」を基に、RGBDカメラ(Intel RealSense D435i)と制御用PCを搭載する構成です。材料リストには、Create3やRealSense、その他の部品が含まれ、合計107,019円となります。手順としては、PCとCreate3のセットアップ、RealSenseのインストール、頭パーツの作成、ボディの取り付け、補助キャスターの取り付け、顔アニメーションの作成が含まれます。最終的に、 (1/2)
ガ〇トのネコ型ロボットを約10万円で自作する計画が紹介されています。iRobot社の教育用ロボット「Create3」を基に、RGBDカメラ(Intel RealSense D435i)と制御用PCを搭載する構成です。材料リストには、Create3やRealSense、その他の部品が含まれ、合計107,019円となります。手順としては、PCとCreate3のセットアップ、RealSenseのインストール、頭パーツの作成、ボディの取り付け、補助キャスターの取り付け、顔アニメーションの作成が含まれます。最終的に、 (1/2)
https://qiita.com/Z0E/items/4b55f5ffbca317e1349e
ガ〇トのネコ型配膳ロボットを自作する試みを紹介。
iRobot社のCreate3をベースに、ROS2を用いて10万円で製作。
3Dプリンターで作成したパーツや顔アニメーションなど、製作過程を詳細に解説。
ガ〇トのネコ型配膳ロボットを自作する試みを紹介。
iRobot社のCreate3をベースに、ROS2を用いて10万円で製作。
3Dプリンターで作成したパーツや顔アニメーションなど、製作過程を詳細に解説。

ガ〇トの某ネコ型ロボットを10万円で作りたい - Qiita
「ガ〇トのネコ型配膳ロボットかわいいよね!研究で使いたい!」と思って値段を見たら〇〇〇万円...。本物は予算オーバーなのでそれっぽいものをお手軽に自作できないかと考えてみました。お掃除ロボットで有…
qiita.com
February 8, 2025 at 3:03 AM
https://qiita.com/Z0E/items/4b55f5ffbca317e1349e
ガ〇トのネコ型配膳ロボットを自作する試みを紹介。
iRobot社のCreate3をベースに、ROS2を用いて10万円で製作。
3Dプリンターで作成したパーツや顔アニメーションなど、製作過程を詳細に解説。
ガ〇トのネコ型配膳ロボットを自作する試みを紹介。
iRobot社のCreate3をベースに、ROS2を用いて10万円で製作。
3Dプリンターで作成したパーツや顔アニメーションなど、製作過程を詳細に解説。

今日のQiitaトレンド
ガ〇トの某ネコ型ロボットを10万円で作りたい
ガ〇トのネコ型配膳ロボットを自作する記事。
高価な本物の代わりに、iRobot Create3をベースにRGBDカメラや3Dプリントパーツなどを組み合わせ、約10万円で類似機能を実現。
Ubuntu、ROSを用いたセットアップや、RealSenseの組み込み、ボディの作成手順、顔アニメーションの追加などを解説し、Nav2パッケージによる自律移動も可能にしている。
ガ〇トの某ネコ型ロボットを10万円で作りたい
ガ〇トのネコ型配膳ロボットを自作する記事。
高価な本物の代わりに、iRobot Create3をベースにRGBDカメラや3Dプリントパーツなどを組み合わせ、約10万円で類似機能を実現。
Ubuntu、ROSを用いたセットアップや、RealSenseの組み込み、ボディの作成手順、顔アニメーションの追加などを解説し、Nav2パッケージによる自律移動も可能にしている。

ガ〇トの某ネコ型ロボットを10万円で作りたい #ROS2 - Qiita
「ガ〇トのネコ型配膳ロボットかわいいよね!研究で使いたい!」と思って値段を見たら〇〇〇万円...。本物は予算オーバーなのでそれっぽいものをお手軽に自作できないかと考えてみました。お掃除ロボットで有…
qiita.com
February 7, 2025 at 10:18 PM
今日のQiitaトレンド
ガ〇トの某ネコ型ロボットを10万円で作りたい
ガ〇トのネコ型配膳ロボットを自作する記事。
高価な本物の代わりに、iRobot Create3をベースにRGBDカメラや3Dプリントパーツなどを組み合わせ、約10万円で類似機能を実現。
Ubuntu、ROSを用いたセットアップや、RealSenseの組み込み、ボディの作成手順、顔アニメーションの追加などを解説し、Nav2パッケージによる自律移動も可能にしている。
ガ〇トの某ネコ型ロボットを10万円で作りたい
ガ〇トのネコ型配膳ロボットを自作する記事。
高価な本物の代わりに、iRobot Create3をベースにRGBDカメラや3Dプリントパーツなどを組み合わせ、約10万円で類似機能を実現。
Ubuntu、ROSを用いたセットアップや、RealSenseの組み込み、ボディの作成手順、顔アニメーションの追加などを解説し、Nav2パッケージによる自律移動も可能にしている。
Been eyeballing Yahboom $140 Pendulus Mecanum Medium chassis/wheels/motors, their $84 driver board, and $28 USB-C hub to have a chassis big enough for my WALL-E character.
Early this year I built Create3-WaLI (wallfollower looking for intelligence) but sent Create3 back. WaLi needs a platform.
Early this year I built Create3-WaLI (wallfollower looking for intelligence) but sent Create3 back. WaLi needs a platform.
December 14, 2024 at 8:21 PM
Been eyeballing Yahboom $140 Pendulus Mecanum Medium chassis/wheels/motors, their $84 driver board, and $28 USB-C hub to have a chassis big enough for my WALL-E character.
Early this year I built Create3-WaLI (wallfollower looking for intelligence) but sent Create3 back. WaLi needs a platform.
Early this year I built Create3-WaLI (wallfollower looking for intelligence) but sent Create3 back. WaLi needs a platform.
Super cool. Looking at linorobot2 site.
Question - mecanum wheels: do they drive straight, do the encoders allow reasonable heading odometry?
The iRobot Create3 had an optical flow sensor combined with wheel odometry and IMU. It could dead reckon amazing..
(Processor was under-spec'd though)
Question - mecanum wheels: do they drive straight, do the encoders allow reasonable heading odometry?
The iRobot Create3 had an optical flow sensor combined with wheel odometry and IMU. It could dead reckon amazing..
(Processor was under-spec'd though)
December 14, 2024 at 7:06 PM
Super cool. Looking at linorobot2 site.
Question - mecanum wheels: do they drive straight, do the encoders allow reasonable heading odometry?
The iRobot Create3 had an optical flow sensor combined with wheel odometry and IMU. It could dead reckon amazing..
(Processor was under-spec'd though)
Question - mecanum wheels: do they drive straight, do the encoders allow reasonable heading odometry?
The iRobot Create3 had an optical flow sensor combined with wheel odometry and IMU. It could dead reckon amazing..
(Processor was under-spec'd though)
Mourning another "robot death"
Watching the #RugWarriorPro robot end production, the #Cye robot go bust, the #GoPiGo3 fizzling, and now the #ROS_2 #Create3 fizzling, is just so disappointing. 25 years of robot deaths. I cannot find words to express how much this is affecting me.
#Robots
Watching the #RugWarriorPro robot end production, the #Cye robot go bust, the #GoPiGo3 fizzling, and now the #ROS_2 #Create3 fizzling, is just so disappointing. 25 years of robot deaths. I cannot find words to express how much this is affecting me.
#Robots
December 6, 2024 at 12:55 AM
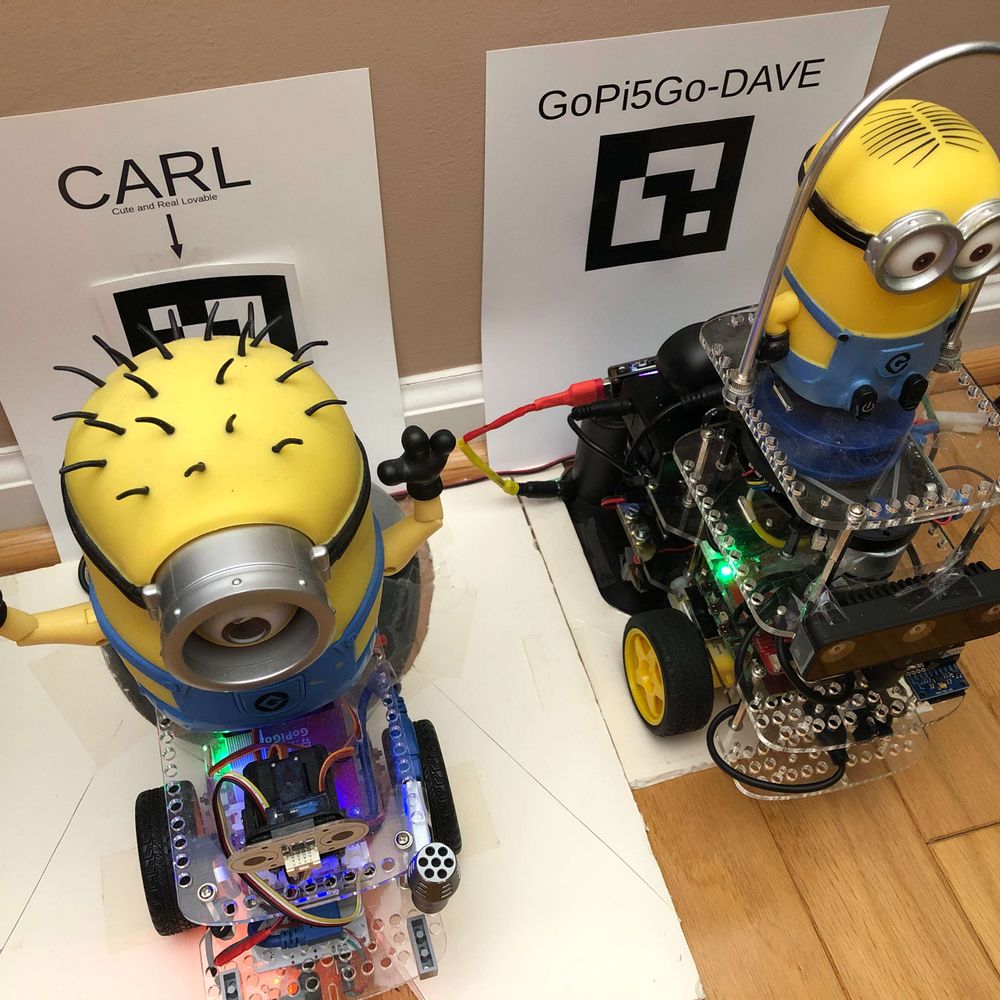
What's on my mind? Disappointment and Disillusionment!
- Invested 7 yrs in #GoPiGo3 #robot
- Robot cannot safely, reliably navigate in complex home environment.
- No slower turns, no inflation value can fix
- No strength for "one more try".
GoPi5Go-Dave shelved with "reached its limit" robots.
- Invested 7 yrs in #GoPiGo3 #robot
- Robot cannot safely, reliably navigate in complex home environment.
- No slower turns, no inflation value can fix
- No strength for "one more try".
GoPi5Go-Dave shelved with "reached its limit" robots.


November 25, 2024 at 2:13 PM
Anyone know what's up with #iRobot #Create3 "Shop" link not working for 3 weeks now? They announced layoffs and have not been seen on their GitHub discussion forum lately.
The Create3 really is/was? the best #ROS2 learning platform: bumpers, self-docking, wall-following, obstacle avoidance, ...
The Create3 really is/was? the best #ROS2 learning platform: bumpers, self-docking, wall-following, obstacle avoidance, ...

November 21, 2024 at 4:00 PM

https://ethereum-magicians.org/t/keyless-contract-deployment-with-create3/16025
“…projects have tried to have same addresses across multiple blockchains and …synchronize account nonce, but eventually one or more goes out of sync and they can no longer …”
“…projects have tried to have same addresses across multiple blockchains and …synchronize account nonce, but eventually one or more goes out of sync and they can no longer …”
October 22, 2023 at 6:14 PM
https://ethereum-magicians.org/t/keyless-contract-deployment-with-create3/16025
“…projects have tried to have same addresses across multiple blockchains and …synchronize account nonce, but eventually one or more goes out of sync and they can no longer …”
“…projects have tried to have same addresses across multiple blockchains and …synchronize account nonce, but eventually one or more goes out of sync and they can no longer …”

"Not only is the #Create3 based on a much more modern #Roomba platform, it’s also compatible with #ROS2, the unexpectedly mature software that a surprising number of #robots are now using to do cool stuff."
#goROS @rosorg #iRobot #robot https://t.co/7KWXKSAR3p
#goROS @rosorg #iRobot #robot https://t.co/7KWXKSAR3p
January 17, 2025 at 1:35 PM
"Not only is the #Create3 based on a much more modern #Roomba platform, it’s also compatible with #ROS2, the unexpectedly mature software that a surprising number of #robots are now using to do cool stuff."
#goROS @rosorg #iRobot #robot https://t.co/7KWXKSAR3p
#goROS @rosorg #iRobot #robot https://t.co/7KWXKSAR3p