



Vincent Lepetit
@vincentlepetit.bsky.social
Reposted by Vincent Lepetit
We introduce MIRO: a new paradigm for T2I model alignment integrating reward conditioning into pretraining, eliminating the need for separate fine-tuning/RL stages. This single-stage approach offers unprecedented efficiency and control.
- 19x faster convergence ⚡
- 370x less FLOPS than FLUX-dev 📉
- 19x faster convergence ⚡
- 370x less FLOPS than FLUX-dev 📉

October 31, 2025 at 11:24 AM
We introduce MIRO: a new paradigm for T2I model alignment integrating reward conditioning into pretraining, eliminating the need for separate fine-tuning/RL stages. This single-stage approach offers unprecedented efficiency and control.
- 19x faster convergence ⚡
- 370x less FLOPS than FLUX-dev 📉
- 19x faster convergence ⚡
- 370x less FLOPS than FLUX-dev 📉
Reposted by Vincent Lepetit

Did you open-source your #ICCV2025 works?
As a PyTorch Ambassador, I would like to write an article to introduce open-sourced ICCV 2025 works (including workshops and demos) for promoting open-source/science + PyTorch
If interested, share your work via the form in my reply 👇
As a PyTorch Ambassador, I would like to write an article to introduce open-sourced ICCV 2025 works (including workshops and demos) for promoting open-source/science + PyTorch
If interested, share your work via the form in my reply 👇

October 12, 2025 at 7:55 PM
Did you open-source your #ICCV2025 works?
As a PyTorch Ambassador, I would like to write an article to introduce open-sourced ICCV 2025 works (including workshops and demos) for promoting open-source/science + PyTorch
If interested, share your work via the form in my reply 👇
As a PyTorch Ambassador, I would like to write an article to introduce open-sourced ICCV 2025 works (including workshops and demos) for promoting open-source/science + PyTorch
If interested, share your work via the form in my reply 👇
Reposted by Vincent Lepetit

Familiar names among #ICCV2025 Outstanding Reviewers from our team 😇
Antoine Guédon @antoine-guedon.bsky.social
Sinisa Stekovic
Renaud Marlet
👏
@iccv.bsky.social
iccv.thecvf.com/Conferences/...
Antoine Guédon @antoine-guedon.bsky.social
Sinisa Stekovic
Renaud Marlet
👏
@iccv.bsky.social
iccv.thecvf.com/Conferences/...
2025 ICCV Program Committee
iccv.thecvf.com
October 4, 2025 at 3:12 PM
Familiar names among #ICCV2025 Outstanding Reviewers from our team 😇
Antoine Guédon @antoine-guedon.bsky.social
Sinisa Stekovic
Renaud Marlet
👏
@iccv.bsky.social
iccv.thecvf.com/Conferences/...
Antoine Guédon @antoine-guedon.bsky.social
Sinisa Stekovic
Renaud Marlet
👏
@iccv.bsky.social
iccv.thecvf.com/Conferences/...
Reposted by Vincent Lepetit

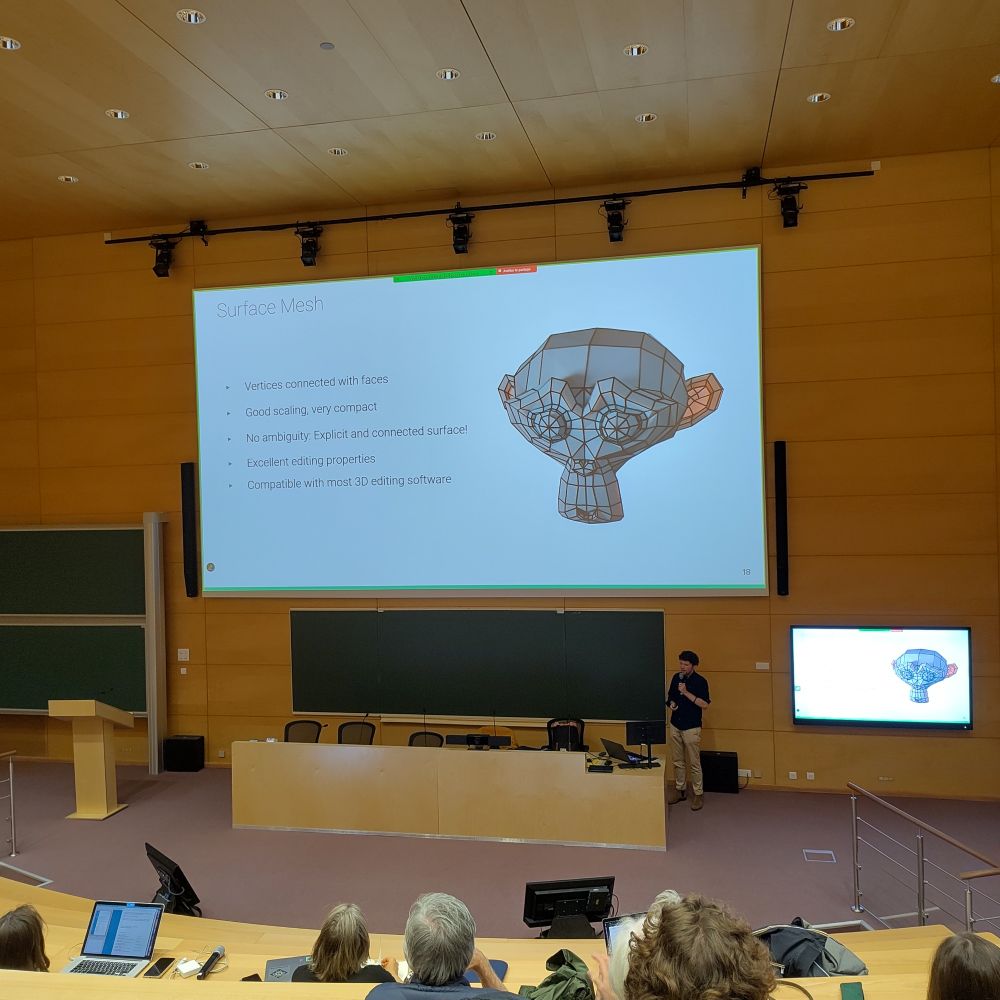
Today is Antoine Guedon's PhD! Already pretty cool visuals right at the start.



September 25, 2025 at 3:17 PM
Today is Antoine Guedon's PhD! Already pretty cool visuals right at the start.
Reposted by Vincent Lepetit
And lastly, if @neuripsconf.bsky.social would choose to reverse the decisions on the papers affected by space constraints, we would be happy and able to accommodate their presentation
September 19, 2025 at 10:01 AM
And lastly, if @neuripsconf.bsky.social would choose to reverse the decisions on the papers affected by space constraints, we would be happy and able to accommodate their presentation
Reposted by Vincent Lepetit

This post from Terence Tao, on the threats to research and science, should be broadly shared wherever you can. It is measured and clear: newsletter.ofthebrave.org/p/im-an-awar...
newsletter.ofthebrave.org
August 18, 2025 at 5:07 PM
This post from Terence Tao, on the threats to research and science, should be broadly shared wherever you can. It is measured and clear: newsletter.ofthebrave.org/p/im-an-awar...
Reposted by Vincent Lepetit

I love the #eurips initiative! But to live up to its potential, it should be accepted an official #neurips conference location (similar to Mexico City) and not just an addon! Then we would save C02, rather than adding to it!!! What can we do to achieve this?
EurIPS is coming! 📣 Mark your calendar for Dec. 2-7, 2025 in Copenhagen 📅
EurIPS is a community-organized conference where you can present accepted NeurIPS 2025 papers, endorsed by @neuripsconf.bsky.social and @nordicair.bsky.social and is co-developed by @ellis.eu
eurips.cc
EurIPS is a community-organized conference where you can present accepted NeurIPS 2025 papers, endorsed by @neuripsconf.bsky.social and @nordicair.bsky.social and is co-developed by @ellis.eu
eurips.cc

July 21, 2025 at 4:30 PM
Reposted by Vincent Lepetit
Probably because #NeurIPS2025 reviews were out, I saw some discussions on author-reviewer duties in ML/CV/NLP communities and complaints based on some common misinformation
Currently, CVPR, ICCV, and WACV require all *qualified* authors to serve as reviewers, NOT all authors
Currently, CVPR, ICCV, and WACV require all *qualified* authors to serve as reviewers, NOT all authors
July 25, 2025 at 12:06 AM
Probably because #NeurIPS2025 reviews were out, I saw some discussions on author-reviewer duties in ML/CV/NLP communities and complaints based on some common misinformation
Currently, CVPR, ICCV, and WACV require all *qualified* authors to serve as reviewers, NOT all authors
Currently, CVPR, ICCV, and WACV require all *qualified* authors to serve as reviewers, NOT all authors
Reposted by Vincent Lepetit

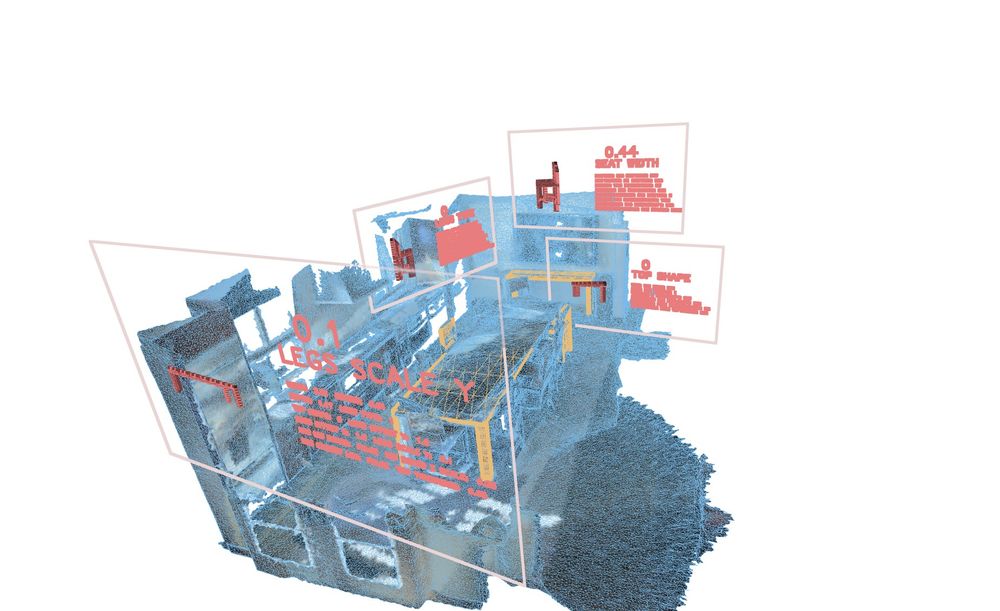
We've released code for integrating Gaussian Splatting with PyTorchGeoNodes — enabling procedural Gaussian Splatting!
This allows interpretable 3D reconstructions with better handling of occlusion, noise, and symmetry. Edit splats by tweaking program parameters.
vevenom.github.io/pytorchgeono...
This allows interpretable 3D reconstructions with better handling of occlusion, noise, and symmetry. Edit splats by tweaking program parameters.
vevenom.github.io/pytorchgeono...
June 30, 2025 at 9:00 AM
We've released code for integrating Gaussian Splatting with PyTorchGeoNodes — enabling procedural Gaussian Splatting!
This allows interpretable 3D reconstructions with better handling of occlusion, noise, and symmetry. Edit splats by tweaking program parameters.
vevenom.github.io/pytorchgeono...
This allows interpretable 3D reconstructions with better handling of occlusion, noise, and symmetry. Edit splats by tweaking program parameters.
vevenom.github.io/pytorchgeono...
I think we did a pretty good job with my amazing #CVPR2025 fellow PCs. With a lot of efforts, and thanks to the hard work of reviewers, ACs, and SACs, the review quality increased while we had to handle a steadily increasing number of submissions.
June 14, 2025 at 9:51 AM
I think we did a pretty good job with my amazing #CVPR2025 fellow PCs. With a lot of efforts, and thanks to the hard work of reviewers, ACs, and SACs, the review quality increased while we had to handle a steadily increasing number of submissions.
Reposted by Vincent Lepetit

The #CVPR2025 main conference open access proceedings is up:
openaccess.thecvf.com/CVPR2025
Workshop papers will be posted shortly. Stay tuned...
openaccess.thecvf.com/CVPR2025
Workshop papers will be posted shortly. Stay tuned...

June 3, 2025 at 2:46 PM
The #CVPR2025 main conference open access proceedings is up:
openaccess.thecvf.com/CVPR2025
Workshop papers will be posted shortly. Stay tuned...
openaccess.thecvf.com/CVPR2025
Workshop papers will be posted shortly. Stay tuned...
Reposted by Vincent Lepetit
Imagine retreat 2025 in progress ☀️🏖️



June 3, 2025 at 1:15 PM
Imagine retreat 2025 in progress ☀️🏖️
Reposted by Vincent Lepetit

Got some recent research related to 6D Object Pose Estimation? Want to present it at #ICCV2025 in Hawaii? 🌴
Then submit and present at the 𝟏𝟎𝐭𝐡 𝐈𝐧𝐭𝐞𝐫𝐧𝐚𝐭𝐢𝐨𝐧𝐚𝐥 𝐖𝐨𝐫𝐤𝐬𝐡𝐨𝐩 𝐨𝐧 𝐑𝐞𝐜𝐨𝐯𝐞𝐫𝐢𝐧𝐠 𝟔𝐃 𝐎𝐛𝐣𝐞𝐜𝐭 𝐏𝐨𝐬𝐞 (𝐑𝟔𝐃).
Paper deadlines: Jun 30 (in-proceedings), Aug 29 (non-proceedings)
Then submit and present at the 𝟏𝟎𝐭𝐡 𝐈𝐧𝐭𝐞𝐫𝐧𝐚𝐭𝐢𝐨𝐧𝐚𝐥 𝐖𝐨𝐫𝐤𝐬𝐡𝐨𝐩 𝐨𝐧 𝐑𝐞𝐜𝐨𝐯𝐞𝐫𝐢𝐧𝐠 𝟔𝐃 𝐎𝐛𝐣𝐞𝐜𝐭 𝐏𝐨𝐬𝐞 (𝐑𝟔𝐃).
Paper deadlines: Jun 30 (in-proceedings), Aug 29 (non-proceedings)
10th International Workshop on Recovering 6D Object Pose (R6D)
cmp.felk.cvut.cz
May 23, 2025 at 12:34 PM
Got some recent research related to 6D Object Pose Estimation? Want to present it at #ICCV2025 in Hawaii? 🌴
Then submit and present at the 𝟏𝟎𝐭𝐡 𝐈𝐧𝐭𝐞𝐫𝐧𝐚𝐭𝐢𝐨𝐧𝐚𝐥 𝐖𝐨𝐫𝐤𝐬𝐡𝐨𝐩 𝐨𝐧 𝐑𝐞𝐜𝐨𝐯𝐞𝐫𝐢𝐧𝐠 𝟔𝐃 𝐎𝐛𝐣𝐞𝐜𝐭 𝐏𝐨𝐬𝐞 (𝐑𝟔𝐃).
Paper deadlines: Jun 30 (in-proceedings), Aug 29 (non-proceedings)
Then submit and present at the 𝟏𝟎𝐭𝐡 𝐈𝐧𝐭𝐞𝐫𝐧𝐚𝐭𝐢𝐨𝐧𝐚𝐥 𝐖𝐨𝐫𝐤𝐬𝐡𝐨𝐩 𝐨𝐧 𝐑𝐞𝐜𝐨𝐯𝐞𝐫𝐢𝐧𝐠 𝟔𝐃 𝐎𝐛𝐣𝐞𝐜𝐭 𝐏𝐨𝐬𝐞 (𝐑𝟔𝐃).
Paper deadlines: Jun 30 (in-proceedings), Aug 29 (non-proceedings)
Reposted by Vincent Lepetit

#CVPR2025 had a 13% rise in paper submissions--13,008 papers, 40,000+ authors. The technical program chairs say it’s courtesy of the #AI explosion & emerging image, video, and world synthesis methods, among other trends. cvpr.thecvf.com/Conferences/...

May 21, 2025 at 7:25 PM
#CVPR2025 had a 13% rise in paper submissions--13,008 papers, 40,000+ authors. The technical program chairs say it’s courtesy of the #AI explosion & emerging image, video, and world synthesis methods, among other trends. cvpr.thecvf.com/Conferences/...
Reposted by Vincent Lepetit
#CVPR2025 Sun June 15 (PM)
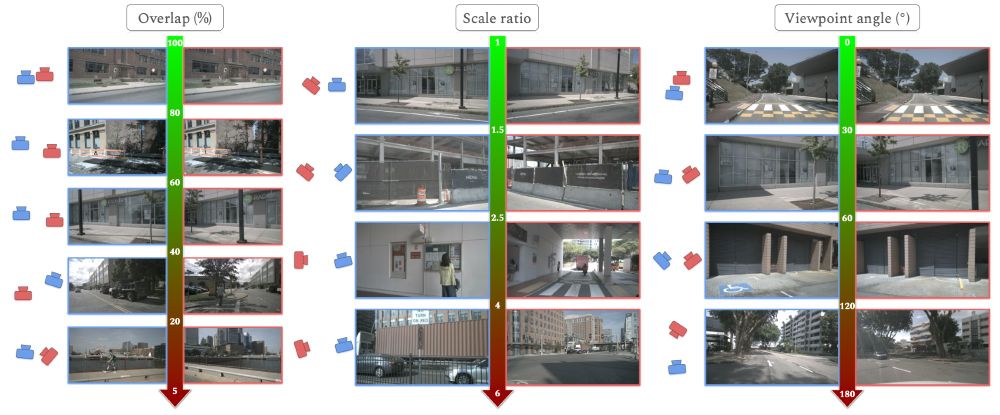
🧩 RUBIK: A Structured Benchmark for Image Matching across Geometric Challenges
@thibaut_loiseau @GBourmaud
@thibautloiseau.bsky.social @gbourmaud.bsky.social
📄 pdf: arxiv.org/abs/2502.19955
🧩 RUBIK: A Structured Benchmark for Image Matching across Geometric Challenges
@thibaut_loiseau @GBourmaud
@thibautloiseau.bsky.social @gbourmaud.bsky.social
📄 pdf: arxiv.org/abs/2502.19955
April 30, 2025 at 1:04 PM
#CVPR2025 Sun June 15 (PM)
🧩 RUBIK: A Structured Benchmark for Image Matching across Geometric Challenges
@thibaut_loiseau @GBourmaud
@thibautloiseau.bsky.social @gbourmaud.bsky.social
📄 pdf: arxiv.org/abs/2502.19955
🧩 RUBIK: A Structured Benchmark for Image Matching across Geometric Challenges
@thibaut_loiseau @GBourmaud
@thibautloiseau.bsky.social @gbourmaud.bsky.social
📄 pdf: arxiv.org/abs/2502.19955
Reposted by Vincent Lepetit
#CVPR2025 Fri June 13 (PM) ✨ Highlight
🍵 MAtCha Gaussians: Atlas of Charts for High-Quality Geometry and Photorealism From Sparse Views
@antoine-guedon.bsky.social @kyotovision.bsky.social
📄 pdf: arxiv.org/abs/2412.06767
🌐 webpage: anttwo.github.io/matcha/
🍵 MAtCha Gaussians: Atlas of Charts for High-Quality Geometry and Photorealism From Sparse Views
@antoine-guedon.bsky.social @kyotovision.bsky.social
📄 pdf: arxiv.org/abs/2412.06767
🌐 webpage: anttwo.github.io/matcha/

April 30, 2025 at 1:04 PM
#CVPR2025 Fri June 13 (PM) ✨ Highlight
🍵 MAtCha Gaussians: Atlas of Charts for High-Quality Geometry and Photorealism From Sparse Views
@antoine-guedon.bsky.social @kyotovision.bsky.social
📄 pdf: arxiv.org/abs/2412.06767
🌐 webpage: anttwo.github.io/matcha/
🍵 MAtCha Gaussians: Atlas of Charts for High-Quality Geometry and Photorealism From Sparse Views
@antoine-guedon.bsky.social @kyotovision.bsky.social
📄 pdf: arxiv.org/abs/2412.06767
🌐 webpage: anttwo.github.io/matcha/
Reposted by Vincent Lepetit
#CVPR2025 Sat June 14 (PM)
🛠️ PyTorchGeoNodes: Enabling Differentiable Shape Programs for 3D Shape Reconstruction
@sinisastekovic.bsky.social Arslan Artykov Stefan Ainetter Mattia D'Urso Friedrich Fraundorfer
📄 pdf: arxiv.org/abs/2404.10620
🌐 webpage: vevenom.github.io/pytorchgeono...
🛠️ PyTorchGeoNodes: Enabling Differentiable Shape Programs for 3D Shape Reconstruction
@sinisastekovic.bsky.social Arslan Artykov Stefan Ainetter Mattia D'Urso Friedrich Fraundorfer
📄 pdf: arxiv.org/abs/2404.10620
🌐 webpage: vevenom.github.io/pytorchgeono...
April 30, 2025 at 1:04 PM
#CVPR2025 Sat June 14 (PM)
🛠️ PyTorchGeoNodes: Enabling Differentiable Shape Programs for 3D Shape Reconstruction
@sinisastekovic.bsky.social Arslan Artykov Stefan Ainetter Mattia D'Urso Friedrich Fraundorfer
📄 pdf: arxiv.org/abs/2404.10620
🌐 webpage: vevenom.github.io/pytorchgeono...
🛠️ PyTorchGeoNodes: Enabling Differentiable Shape Programs for 3D Shape Reconstruction
@sinisastekovic.bsky.social Arslan Artykov Stefan Ainetter Mattia D'Urso Friedrich Fraundorfer
📄 pdf: arxiv.org/abs/2404.10620
🌐 webpage: vevenom.github.io/pytorchgeono...
Reposted by Vincent Lepetit

Leveraging Automatic CAD Annotations for Supervised Learning in 3D Scene Understanding
Yuchen Rao, Stefan Ainetter, Sinisa Stekovic, @vincentlepetit.bsky.social , Friedrich Fraundorfer
tl;dr: in title
arxiv.org/abs/2504.13580
Yuchen Rao, Stefan Ainetter, Sinisa Stekovic, @vincentlepetit.bsky.social , Friedrich Fraundorfer
tl;dr: in title
arxiv.org/abs/2504.13580




April 28, 2025 at 9:13 AM
Leveraging Automatic CAD Annotations for Supervised Learning in 3D Scene Understanding
Yuchen Rao, Stefan Ainetter, Sinisa Stekovic, @vincentlepetit.bsky.social , Friedrich Fraundorfer
tl;dr: in title
arxiv.org/abs/2504.13580
Yuchen Rao, Stefan Ainetter, Sinisa Stekovic, @vincentlepetit.bsky.social , Friedrich Fraundorfer
tl;dr: in title
arxiv.org/abs/2504.13580
Reposted by Vincent Lepetit
Reminder! The deadline for #CVPR2025 Social Events proposals is fast approaching. If you are planning to submit, make sure you do not miss the submission closing time!
The #CVPR2025 Social Events proposal deadline has been EXTENDED!
🆕 Deadline: Apr 25, 2025 11:59 PM AOE
Notification by: Apr 28, 2025
Call: cvpr.thecvf.com/Conferences/...
🆕 Deadline: Apr 25, 2025 11:59 PM AOE
Notification by: Apr 28, 2025
Call: cvpr.thecvf.com/Conferences/...
Check out the Call for #CVPR2025 Socials
CVPR is inviting proposals for social events to happen during the main conference (in-person)!
Have a great idea for a social event? Please send us your proposal!
The Deadline is quickly approaching, Apr 18, 2025 11:59 PM AOE.
CVPR is inviting proposals for social events to happen during the main conference (in-person)!
Have a great idea for a social event? Please send us your proposal!
The Deadline is quickly approaching, Apr 18, 2025 11:59 PM AOE.
April 24, 2025 at 11:22 AM
Reminder! The deadline for #CVPR2025 Social Events proposals is fast approaching. If you are planning to submit, make sure you do not miss the submission closing time!
Reposted by Vincent Lepetit
We're hiring! IMAGINE @ École des Ponts (Paris area) is opening a 4-year "CV for X" researcher position:
– competitive salary
– no teaching load
– starting pkg ≈ 2 PhDs
– goal: impactful core AI + X (climate, biodiversity, robotics...)
Apply by May 31: imagine-lab.enpc.fr/wp-content/u...
– competitive salary
– no teaching load
– starting pkg ≈ 2 PhDs
– goal: impactful core AI + X (climate, biodiversity, robotics...)
Apply by May 31: imagine-lab.enpc.fr/wp-content/u...
April 24, 2025 at 3:02 PM
We're hiring! IMAGINE @ École des Ponts (Paris area) is opening a 4-year "CV for X" researcher position:
– competitive salary
– no teaching load
– starting pkg ≈ 2 PhDs
– goal: impactful core AI + X (climate, biodiversity, robotics...)
Apply by May 31: imagine-lab.enpc.fr/wp-content/u...
– competitive salary
– no teaching load
– starting pkg ≈ 2 PhDs
– goal: impactful core AI + X (climate, biodiversity, robotics...)
Apply by May 31: imagine-lab.enpc.fr/wp-content/u...
Reposted by Vincent Lepetit

The BOP report of 2024 is out: arxiv.org/abs/2504.02812
BOP is a benchmark for 6D object pose estimation, with a new challenge organised yearly.
Community: Model-based 6D localisation? Pff, easy-peasy. 💪
BOP: Ok. Model-free 6D detection on the datasets below 👇
Community: 🙈 (0 entries submitted)
BOP is a benchmark for 6D object pose estimation, with a new challenge organised yearly.
Community: Model-based 6D localisation? Pff, easy-peasy. 💪
BOP: Ok. Model-free 6D detection on the datasets below 👇
Community: 🙈 (0 entries submitted)

April 8, 2025 at 7:55 AM
The BOP report of 2024 is out: arxiv.org/abs/2504.02812
BOP is a benchmark for 6D object pose estimation, with a new challenge organised yearly.
Community: Model-based 6D localisation? Pff, easy-peasy. 💪
BOP: Ok. Model-free 6D detection on the datasets below 👇
Community: 🙈 (0 entries submitted)
BOP is a benchmark for 6D object pose estimation, with a new challenge organised yearly.
Community: Model-based 6D localisation? Pff, easy-peasy. 💪
BOP: Ok. Model-free 6D detection on the datasets below 👇
Community: 🙈 (0 entries submitted)
Reposted by Vincent Lepetit
There is some discussion of having a satellite location for NEURIPS 25 outside the US but in a similar time zone. Folks are studying the feasibility and trying to guess how many people would go there
March 21, 2025 at 4:31 PM
There is some discussion of having a satellite location for NEURIPS 25 outside the US but in a similar time zone. Folks are studying the feasibility and trying to guess how many people would go there
Reposted by Vincent Lepetit
Would you present your next NeurIPS paper in Europe instead of traveling to San Diego (US) if this was an option? Søren Hauberg (DTU) and I would love to hear the answer through this poll: (1/6)
NeurIPS participation in Europe
We seek to understand if there is interest in being able to attend NeurIPS in Europe, i.e. without travelling to San Diego, US. In the following, assume that it is possible to present accepted papers ...
docs.google.com
March 30, 2025 at 6:04 PM
Would you present your next NeurIPS paper in Europe instead of traveling to San Diego (US) if this was an option? Søren Hauberg (DTU) and I would love to hear the answer through this poll: (1/6)