



Hide Matsuki
@hidematsu82.bsky.social
PhD candidate at the Dyson Robotics Lab, Imperial College London (SLAM, Dynamic Vision, Robotics).
Love to make something fast, intuitive, and interactive.
https://muskie82.github.io/
Love to make something fast, intuitive, and interactive.
https://muskie82.github.io/
Reposted by Hide Matsuki

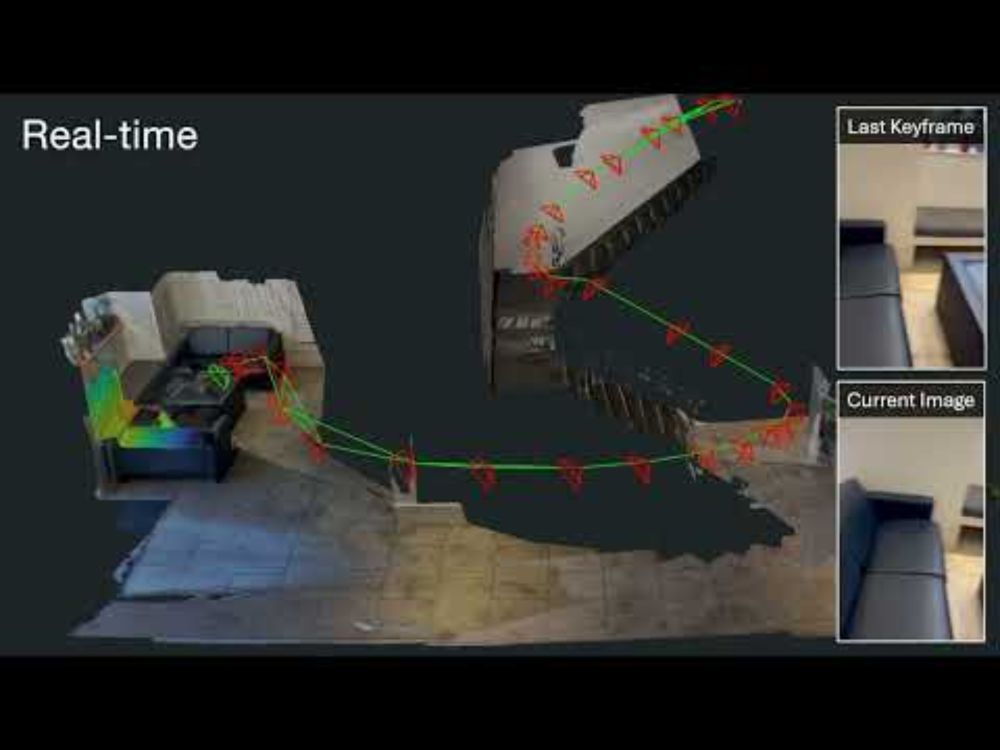
MASt3R-SLAM: Real-Time Dense SLAM with 3D Reconstruction Priors
YouTube video by Riku Murai
youtu.be
December 16, 2024 at 3:43 PM
Reposted by Hide Matsuki
For robustness, MASt3R-SLAM performs relocalisation allowing it to handle the kidnapped robot problem.
As a purely monocular SLAM, it loses track when the camera’s view is obstructed, but as soon as the view is unblocked, it immediately relocalises and resumes mapping.
As a purely monocular SLAM, it loses track when the camera’s view is obstructed, but as soon as the view is unblocked, it immediately relocalises and resumes mapping.
December 16, 2024 at 3:43 PM
For robustness, MASt3R-SLAM performs relocalisation allowing it to handle the kidnapped robot problem.
As a purely monocular SLAM, it loses track when the camera’s view is obstructed, but as soon as the view is unblocked, it immediately relocalises and resumes mapping.
As a purely monocular SLAM, it loses track when the camera’s view is obstructed, but as soon as the view is unblocked, it immediately relocalises and resumes mapping.
Reposted by Hide Matsuki

Nice question! My favorite scene representation is code -- procedurally generated scenes. One of my most beloved videos is Inigo Quilez's "Painting a Landscape with Maths" (www.youtube.com/watch?v=BFld...). This nicely shows the power of composing simple functions in synthesizing visual complexity.

Painting a Landscape with Maths
YouTube video by Inigo Quilez
www.youtube.com
November 27, 2024 at 1:15 AM
Nice question! My favorite scene representation is code -- procedurally generated scenes. One of my most beloved videos is Inigo Quilez's "Painting a Landscape with Maths" (www.youtube.com/watch?v=BFld...). This nicely shows the power of composing simple functions in synthesizing visual complexity.