



Hide Matsuki
@hidematsu82.bsky.social
PhD candidate at the Dyson Robotics Lab, Imperial College London (SLAM, Dynamic Vision, Robotics).
Love to make something fast, intuitive, and interactive.
https://muskie82.github.io/
Love to make something fast, intuitive, and interactive.
https://muskie82.github.io/
Reposted by Hide Matsuki
Full draft of the SLAM Handbook now released --- available as a free PDF, with a printed version coming soon. Now including Part 3, "From SLAM to Spatial AI" (I knew it would catch on eventually), with contributions from @hidematsu82.bsky.social and me.
#SpatialAI
github.com/SLAM-Handboo...
#SpatialAI
github.com/SLAM-Handboo...
GitHub - SLAM-Handbook-contributors/slam-handbook-public-release: Release repo for our SLAM Handbook
Release repo for our SLAM Handbook. Contribute to SLAM-Handbook-contributors/slam-handbook-public-release development by creating an account on GitHub.
github.com
May 16, 2025 at 2:24 PM
Full draft of the SLAM Handbook now released --- available as a free PDF, with a printed version coming soon. Now including Part 3, "From SLAM to Spatial AI" (I knew it would catch on eventually), with contributions from @hidematsu82.bsky.social and me.
#SpatialAI
github.com/SLAM-Handboo...
#SpatialAI
github.com/SLAM-Handboo...
Reposted by Hide Matsuki

MASt3R-SLAM: Real-Time Dense SLAM with 3D Reconstruction Priors
YouTube video by Riku Murai
youtu.be
December 16, 2024 at 3:43 PM
Reposted by Hide Matsuki
For robustness, MASt3R-SLAM performs relocalisation allowing it to handle the kidnapped robot problem.
As a purely monocular SLAM, it loses track when the camera’s view is obstructed, but as soon as the view is unblocked, it immediately relocalises and resumes mapping.
As a purely monocular SLAM, it loses track when the camera’s view is obstructed, but as soon as the view is unblocked, it immediately relocalises and resumes mapping.
December 16, 2024 at 3:43 PM
For robustness, MASt3R-SLAM performs relocalisation allowing it to handle the kidnapped robot problem.
As a purely monocular SLAM, it loses track when the camera’s view is obstructed, but as soon as the view is unblocked, it immediately relocalises and resumes mapping.
As a purely monocular SLAM, it loses track when the camera’s view is obstructed, but as soon as the view is unblocked, it immediately relocalises and resumes mapping.
Reposted by Hide Matsuki
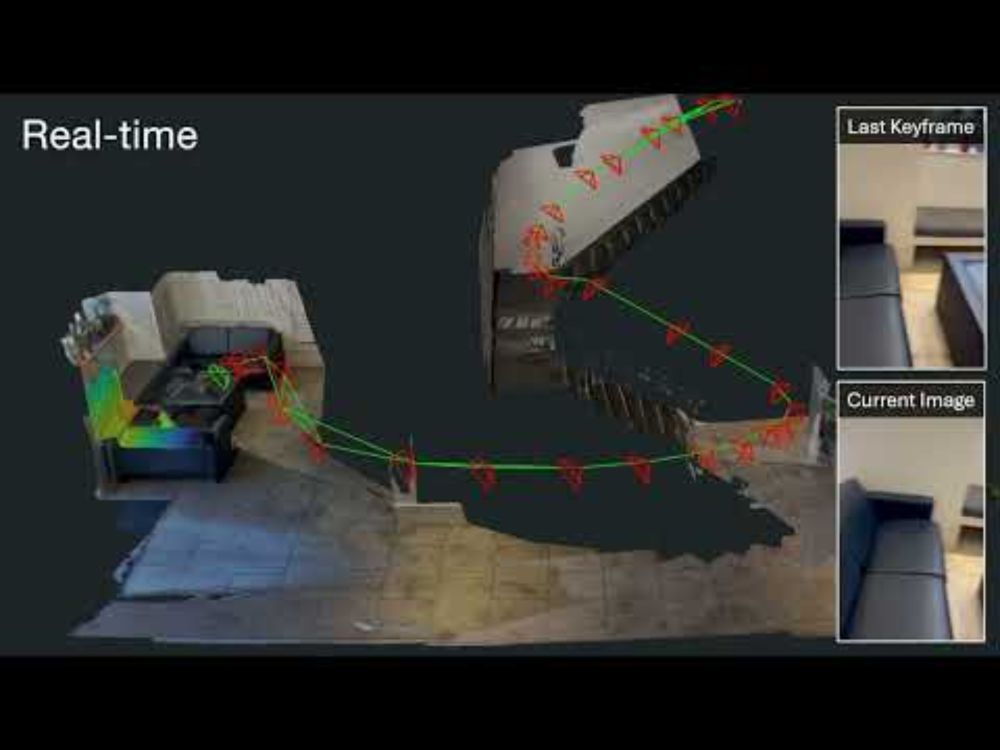
Introducing MASt3R-SLAM, the first real-time monocular dense SLAM with MASt3R as a foundation.
Easy to use like DUSt3R/MASt3R, from an uncalibrated RGB video it recovers accurate, globally consistent poses & a dense map.
With @ericdexheimer.bsky.social* @ajdavison.bsky.social (*Equal Contribution)
Easy to use like DUSt3R/MASt3R, from an uncalibrated RGB video it recovers accurate, globally consistent poses & a dense map.
With @ericdexheimer.bsky.social* @ajdavison.bsky.social (*Equal Contribution)
December 16, 2024 at 3:43 PM
Introducing MASt3R-SLAM, the first real-time monocular dense SLAM with MASt3R as a foundation.
Easy to use like DUSt3R/MASt3R, from an uncalibrated RGB video it recovers accurate, globally consistent poses & a dense map.
With @ericdexheimer.bsky.social* @ajdavison.bsky.social (*Equal Contribution)
Easy to use like DUSt3R/MASt3R, from an uncalibrated RGB video it recovers accurate, globally consistent poses & a dense map.
With @ericdexheimer.bsky.social* @ajdavison.bsky.social (*Equal Contribution)
Reposted by Hide Matsuki
MASt3R-SLAM: easily the most robust dense monocular SLAM system I've ever seen, and also very accurate. Real-time, RGB only (no IMU), handles unknown focal length and zoom. More new videos coming soon
@ericdexheimer.bsky.social @rmurai0610.bsky.social. Paper and more: edexheim.github.io/mast3r-slam
@ericdexheimer.bsky.social @rmurai0610.bsky.social. Paper and more: edexheim.github.io/mast3r-slam
December 16, 2024 at 4:03 PM
MASt3R-SLAM: easily the most robust dense monocular SLAM system I've ever seen, and also very accurate. Real-time, RGB only (no IMU), handles unknown focal length and zoom. More new videos coming soon
@ericdexheimer.bsky.social @rmurai0610.bsky.social. Paper and more: edexheim.github.io/mast3r-slam
@ericdexheimer.bsky.social @rmurai0610.bsky.social. Paper and more: edexheim.github.io/mast3r-slam
Reposted by Hide Matsuki

Nice question! My favorite scene representation is code -- procedurally generated scenes. One of my most beloved videos is Inigo Quilez's "Painting a Landscape with Maths" (www.youtube.com/watch?v=BFld...). This nicely shows the power of composing simple functions in synthesizing visual complexity.

Painting a Landscape with Maths
YouTube video by Inigo Quilez
www.youtube.com
November 27, 2024 at 1:15 AM
Nice question! My favorite scene representation is code -- procedurally generated scenes. One of my most beloved videos is Inigo Quilez's "Painting a Landscape with Maths" (www.youtube.com/watch?v=BFld...). This nicely shows the power of composing simple functions in synthesizing visual complexity.