



Seungchan Kim
@seungchankim.bsky.social
PhD student at CMU Robotics Institute
We evaluated MapEx on a KTH floorplan dataset simulator. We show MapEx outperforms state-of-the-art map prediction-based exploration baselines. 5/n

February 10, 2025 at 5:02 PM
We evaluated MapEx on a KTH floorplan dataset simulator. We show MapEx outperforms state-of-the-art map prediction-based exploration baselines. 5/n
MapEx generates multiple predicted maps from the observed maps, from which we compute mean and variance maps.
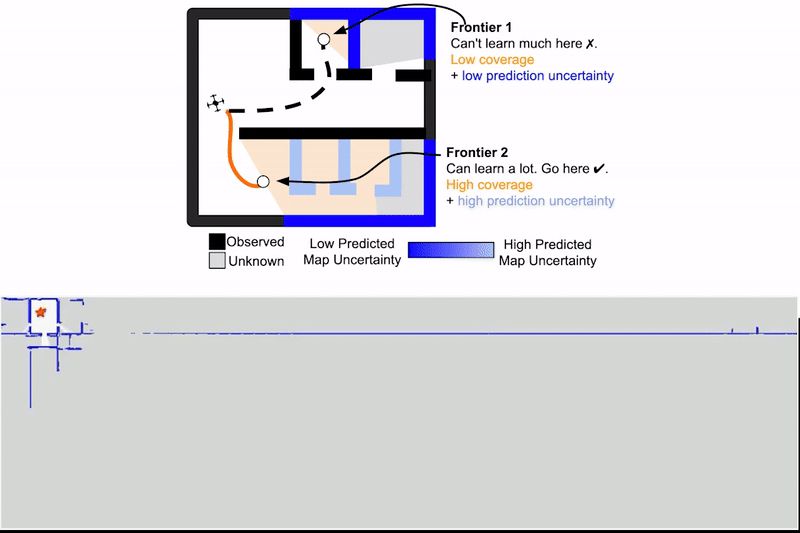
We take the variances of predicted maps and estimated visible area into consideration to compute the information gain of a given viewpoint for exploration planning. 4/n
We take the variances of predicted maps and estimated visible area into consideration to compute the information gain of a given viewpoint for exploration planning. 4/n

February 10, 2025 at 5:02 PM
MapEx generates multiple predicted maps from the observed maps, from which we compute mean and variance maps.
We take the variances of predicted maps and estimated visible area into consideration to compute the information gain of a given viewpoint for exploration planning. 4/n
We take the variances of predicted maps and estimated visible area into consideration to compute the information gain of a given viewpoint for exploration planning. 4/n
Real-world indoor environments often have structure and repeating patterns. To leverage this, we train LaMa, an inpainting network, to predict unknown areas from partial observations—enabling our map predictor to infer beyond what's seen. 3/n

February 10, 2025 at 5:02 PM
Real-world indoor environments often have structure and repeating patterns. To leverage this, we train LaMa, an inpainting network, to predict unknown areas from partial observations—enabling our map predictor to infer beyond what's seen. 3/n
Tl;dr: Predict multiple maps → estimate uncertainty and sensor coverage → explore to build accurate maps faster.
We introduce MapEx, a new exploration framework that uses predicted maps to form probabilistic sensor models as information gain metric for exploration planning. 2/n
We introduce MapEx, a new exploration framework that uses predicted maps to form probabilistic sensor models as information gain metric for exploration planning. 2/n

February 10, 2025 at 5:02 PM
Tl;dr: Predict multiple maps → estimate uncertainty and sensor coverage → explore to build accurate maps faster.
We introduce MapEx, a new exploration framework that uses predicted maps to form probabilistic sensor models as information gain metric for exploration planning. 2/n
We introduce MapEx, a new exploration framework that uses predicted maps to form probabilistic sensor models as information gain metric for exploration planning. 2/n
Excited to announce MapEx is accepted to ICRA 2025! 🚀
🤖🕵️♀️How can a robot explore to build accurate maps without seeing everything?
mapex-explorer.github.io
We explore by jointly reasoning on prediction uncertainty and potential sensor coverage using multiple map predictions of unseen areas. 1/n
🤖🕵️♀️How can a robot explore to build accurate maps without seeing everything?
mapex-explorer.github.io
We explore by jointly reasoning on prediction uncertainty and potential sensor coverage using multiple map predictions of unseen areas. 1/n
February 10, 2025 at 5:02 PM
Excited to announce MapEx is accepted to ICRA 2025! 🚀
🤖🕵️♀️How can a robot explore to build accurate maps without seeing everything?
mapex-explorer.github.io
We explore by jointly reasoning on prediction uncertainty and potential sensor coverage using multiple map predictions of unseen areas. 1/n
🤖🕵️♀️How can a robot explore to build accurate maps without seeing everything?
mapex-explorer.github.io
We explore by jointly reasoning on prediction uncertainty and potential sensor coverage using multiple map predictions of unseen areas. 1/n