




朝日薫/multix.jp
@multix.jp
◆KEEP TRYING, THE GOD SAVE YOU!◆もっぱらPerlとCとmodernAVRの人◆BASICもCOBOLもFORTHもFORTRANもまだ死なない◆成果物とか→askn37.github.io◆mixi→https://mixi.jp/show_profile.pl?id=10641◆Twitter(X)→https://twilog.togetter.com/askn37
島3号の農業プラント群、実はこれといった説明がなく構造もサイズも謎。シリンダー本体が詳細に検討されてるとの比較すると、プラントや両端ハブはとってつけたように雑。コネクションロッドの強度計算も端折られてるし。とりまプラント群は1000m立方の円柱で描画。それで単体の印象はそう不自然でもないが、スタンフォード・トーラス(1万規模)は外径1600mなので横に並べて見ると、ものすごくナンダコレになる。正投影描画では圧縮効果もあって脳がバグる。

October 10, 2025 at 11:40 PM
島3号の農業プラント群、実はこれといった説明がなく構造もサイズも謎。シリンダー本体が詳細に検討されてるとの比較すると、プラントや両端ハブはとってつけたように雑。コネクションロッドの強度計算も端折られてるし。とりまプラント群は1000m立方の円柱で描画。それで単体の印象はそう不自然でもないが、スタンフォード・トーラス(1万規模)は外径1600mなので横に並べて見ると、ものすごくナンダコレになる。正投影描画では圧縮効果もあって脳がバグる。
説明用のサイズ比較目的で各種宇宙コロニーのシルエットモデルを作ってるのだが、島3号フルサイズのスケール感明らかにバグってんなwそれとスタンフォード・トーラス、50年以上前の論文原典がリンク切れで見つからず、評論も複数のスペックがごちゃ混ぜで(Wikiですら数種ある)何が正しいのか解らない。だいたいよく見る想像図も夢想とデザインありきで描かれてるから細部を検討すると「なんでこうなってるんだ?」って疑問が無限に沸いてくる。全くもって面白いけどSF考証的には泥沼だ。

October 10, 2025 at 12:10 PM
説明用のサイズ比較目的で各種宇宙コロニーのシルエットモデルを作ってるのだが、島3号フルサイズのスケール感明らかにバグってんなwそれとスタンフォード・トーラス、50年以上前の論文原典がリンク切れで見つからず、評論も複数のスペックがごちゃ混ぜで(Wikiですら数種ある)何が正しいのか解らない。だいたいよく見る想像図も夢想とデザインありきで描かれてるから細部を検討すると「なんでこうなってるんだ?」って疑問が無限に沸いてくる。全くもって面白いけどSF考証的には泥沼だ。
【作業ステージ】はブーム外側を上下に移動し、目標作業半径位置で固定される。その半径で重力垂線に合うよう角度変更可能なコンテナヤードウィングと、中央開口を閉鎖できる軸方向移動台を各2組備える。これは作業を終えた空荷の貨物パレットと新たに下降してきた貨物パレットを昇降1往復で交換可能にするためだ。比較的高速に昇降できる軽貨物コンテナシャフト(これは観覧車の籠のように重力垂線に対応できる昇降リフトを持つ)と違い、重貨物を載せた中央昇降台の1往復には長い時間が必要になる。



October 8, 2025 at 8:59 AM
【作業ステージ】はブーム外側を上下に移動し、目標作業半径位置で固定される。その半径で重力垂線に合うよう角度変更可能なコンテナヤードウィングと、中央開口を閉鎖できる軸方向移動台を各2組備える。これは作業を終えた空荷の貨物パレットと新たに下降してきた貨物パレットを昇降1往復で交換可能にするためだ。比較的高速に昇降できる軽貨物コンテナシャフト(これは観覧車の籠のように重力垂線に対応できる昇降リフトを持つ)と違い、重貨物を載せた中央昇降台の1往復には長い時間が必要になる。
【EVブーム】は地球上の普通のクレーンとは重力方向が上下逆で、重力井戸の底へ向かって伸ばさなければならず、自分自身を足場にしつつ積み上げて延長することができない。故にブームの構成要素は無重力に近い回転中心側で組み立て、強烈な引抜抗力に抗いながら順次繰り出す方法を取る。ブームには2本のコンテナシャフトと4本のカウンターウェイトシャフトが通され、28mピッチ6要素で1段を為す。左右のブームは重力垂線に対して平行でなく先端が開く向きに張力が掛かるので、数段毎に補強梁が取り付けられる。



October 8, 2025 at 8:59 AM
【EVブーム】は地球上の普通のクレーンとは重力方向が上下逆で、重力井戸の底へ向かって伸ばさなければならず、自分自身を足場にしつつ積み上げて延長することができない。故にブームの構成要素は無重力に近い回転中心側で組み立て、強烈な引抜抗力に抗いながら順次繰り出す方法を取る。ブームには2本のコンテナシャフトと4本のカウンターウェイトシャフトが通され、28mピッチ6要素で1段を為す。左右のブームは重力垂線に対して平行でなく先端が開く向きに張力が掛かるので、数段毎に補強梁が取り付けられる。
【エレベータークレーンモジュール】は工業プラントと並んでこのステーションの中核をなし、建造対象(居留区シリンダー)に遠心重力下での作業足場を提供する。最大110m四方のギヤードエレベーターが垂直昇降するブームを3組備え、それぞれに2組の300m級作業ステージが用意される。ステージには多数のロボアームや連結ロッドが取り付き、建造途中の本体シリンダーとミラー支持構造を捉えながらそれらの構成トラスを螺旋状に組み上げ延長してゆく。構造物が一旦出来上がれば自分自身を足場に居留区建造は進められるので、一番最初の「無の空間に足場を作る」のがこのモジュールの役割だ。


October 8, 2025 at 8:59 AM
【エレベータークレーンモジュール】は工業プラントと並んでこのステーションの中核をなし、建造対象(居留区シリンダー)に遠心重力下での作業足場を提供する。最大110m四方のギヤードエレベーターが垂直昇降するブームを3組備え、それぞれに2組の300m級作業ステージが用意される。ステージには多数のロボアームや連結ロッドが取り付き、建造途中の本体シリンダーとミラー支持構造を捉えながらそれらの構成トラスを螺旋状に組み上げ延長してゆく。構造物が一旦出来上がれば自分自身を足場に居留区建造は進められるので、一番最初の「無の空間に足場を作る」のがこのモジュールの役割だ。
【居住区モジュール】は密閉型有人大気圧施設で直径1300mのD型断面トーラスを持つ。D型なのは軸方向の水平最大化(約190m)と気密容積の節約(有効天井高90m)を両立しながら外壁の耐圧隔壁強度を保つため。ジオイド面は半径620.6mで約74haの有効床面積がある。3本の昇降シャフト(ちょうど東京スカイツリーと同規模)は真空暴露で気密隔壁とエアロックはトーラス内にある。これを境に居住区は三等分され、8時間x3の時差を持つ人工ホリゾント照明(劇場的。なので整備用天井裏がある)が擬似重力環境に昼夜を作る。

October 7, 2025 at 9:57 AM
【居住区モジュール】は密閉型有人大気圧施設で直径1300mのD型断面トーラスを持つ。D型なのは軸方向の水平最大化(約190m)と気密容積の節約(有効天井高90m)を両立しながら外壁の耐圧隔壁強度を保つため。ジオイド面は半径620.6mで約74haの有効床面積がある。3本の昇降シャフト(ちょうど東京スカイツリーと同規模)は真空暴露で気密隔壁とエアロックはトーラス内にある。これを境に居住区は三等分され、8時間x3の時差を持つ人工ホリゾント照明(劇場的。なので整備用天井裏がある)が擬似重力環境に昼夜を作る。
【ストレージヤード】は多数の100m級貨物パレットを低重力真空暴露で長期間留置する施設で、鉄製工作物の残留応力を除く「ねらし」工程や冷却、倉庫目的に使われる。各区画に遮光シートを張ることもあるので外観はこの限りではない。最内周と2段目は多数のロボアームやホイストを装備し、移送ホイールと往来できる汎用作業ヤードだが、3段目以下はEVクレーンからしかアクセスできない(かつ有人立入困難な)留置専用なのでクレーンモジュールと隣接して運用される。また工事進捗に応じて増築可能だが、6段目まで増やすと居住区トーラスより大直径になるし構造的にも割り切った設計強度なので限度はある。

October 7, 2025 at 9:57 AM
【ストレージヤード】は多数の100m級貨物パレットを低重力真空暴露で長期間留置する施設で、鉄製工作物の残留応力を除く「ねらし」工程や冷却、倉庫目的に使われる。各区画に遮光シートを張ることもあるので外観はこの限りではない。最内周と2段目は多数のロボアームやホイストを装備し、移送ホイールと往来できる汎用作業ヤードだが、3段目以下はEVクレーンからしかアクセスできない(かつ有人立入困難な)留置専用なのでクレーンモジュールと隣接して運用される。また工事進捗に応じて増築可能だが、6段目まで増やすと居住区トーラスより大直径になるし構造的にも割り切った設計強度なので限度はある。
【マスキャッチャー】はステーションとは別の無人宇宙機だが関係の深い宇宙施設だ。人造黒鉛で分厚く被覆した円錐型装甲に複数のロケットモーターを2軸支持架台で取り付けただけの単純な構造だが、開口直径は200mある。長楕円月周回低軌道に投入され、月面マスドライバー(多段コイルガン式)が投射する1m立方角に固められ(磁力射出のため)金網で覆ったレゴリス塊を捕獲する。当然毎秒キロ速度の衝突で投射塊は粉砕され、ジュール熱で融解し(プラズマ化した一部は磁力ネットで吸着し)運動量をマスキャッチャーに移しながら(周回軌道を大きくしながら)円錐状に成形させてゆく。


October 6, 2025 at 12:00 AM
【マスキャッチャー】はステーションとは別の無人宇宙機だが関係の深い宇宙施設だ。人造黒鉛で分厚く被覆した円錐型装甲に複数のロケットモーターを2軸支持架台で取り付けただけの単純な構造だが、開口直径は200mある。長楕円月周回低軌道に投入され、月面マスドライバー(多段コイルガン式)が投射する1m立方角に固められ(磁力射出のため)金網で覆ったレゴリス塊を捕獲する。当然毎秒キロ速度の衝突で投射塊は粉砕され、ジュール熱で融解し(プラズマ化した一部は磁力ネットで吸着し)運動量をマスキャッチャーに移しながら(周回軌道を大きくしながら)円錐状に成形させてゆく。
【35mタンクボート】搬入する非固体物資の危険度にもよるが、搬出入作業の効率を改善するため自律航行能力を備えたタンクボートも使われる。これは3重断熱隔壁タンクの周囲に、パイプラインに繋がる2流路同芯ジョイント、固定リング、姿勢制御用4機のモーメンタムホイール、3軸移動用4方向4機のスラスター、そして脱着可能なエンジン動力ユニットを備える。その推進剤も用途によって選択されるが、液酸液水系以外では(意外にも)過酸化水素+水推進材系の使用割合が多い。液酸液水を原料とする合成プラントが6mコンテナに収まるのと暴発事故に強い真空の現場で直接生成と充填ができるからだ。

October 5, 2025 at 9:46 AM
【35mタンクボート】搬入する非固体物資の危険度にもよるが、搬出入作業の効率を改善するため自律航行能力を備えたタンクボートも使われる。これは3重断熱隔壁タンクの周囲に、パイプラインに繋がる2流路同芯ジョイント、固定リング、姿勢制御用4機のモーメンタムホイール、3軸移動用4方向4機のスラスター、そして脱着可能なエンジン動力ユニットを備える。その推進剤も用途によって選択されるが、液酸液水系以外では(意外にも)過酸化水素+水推進材系の使用割合が多い。液酸液水を原料とする合成プラントが6mコンテナに収まるのと暴発事故に強い真空の現場で直接生成と充填ができるからだ。
【モジュール間パイプラインがない】ステーションの各回転モジュールは互いに物理結合を持たず、非接触電磁気伝達以外の関わりを持たない。当然液体、気体を効率よく搬送する縦断パイプライン網も構築できないので、それらは独立した低重力懸垂式タンクヤードに集積される。つまり非固体物資は35mタンクごと外部から搬入され、移送ホイールのリフトと専用搬送パレットを用いて脱着する。モジュール外の各現場で必要なガス類は6mコンテナ規格のタンクに充填、小分けして分配、搬送される。
October 5, 2025 at 9:46 AM
【モジュール間パイプラインがない】ステーションの各回転モジュールは互いに物理結合を持たず、非接触電磁気伝達以外の関わりを持たない。当然液体、気体を効率よく搬送する縦断パイプライン網も構築できないので、それらは独立した低重力懸垂式タンクヤードに集積される。つまり非固体物資は35mタンクごと外部から搬入され、移送ホイールのリフトと専用搬送パレットを用いて脱着する。モジュール外の各現場で必要なガス類は6mコンテナ規格のタンクに充填、小分けして分配、搬送される。
【工業プラント】有重力モジュールは月レゴリスを主原料とする製鉄、製鋼、アルミやチタンの精錬、C1合成ガスプラント、セメント焼成キルン等を格納した直径800mの重工業施設だ。軸方向の水平長を最大化しつつ耐圧を確保するためのD型断面をもつトーラスを、重大事故(もっぱら高温高圧有毒ガス漏洩)の影響を最小化するために3分割した構造になっている。6本の楕円断面シャフトはエアロックも兼ねつつ軸方向で最長100mの重貨物を昇降可能。またホイール外部は直径35mの各種資源タンクを最大30機係留できるタンクヤードだ。そしてトーラスの日陰面はほとんどが冷却用ヒートシンクに覆われる。

October 5, 2025 at 9:46 AM
【工業プラント】有重力モジュールは月レゴリスを主原料とする製鉄、製鋼、アルミやチタンの精錬、C1合成ガスプラント、セメント焼成キルン等を格納した直径800mの重工業施設だ。軸方向の水平長を最大化しつつ耐圧を確保するためのD型断面をもつトーラスを、重大事故(もっぱら高温高圧有毒ガス漏洩)の影響を最小化するために3分割した構造になっている。6本の楕円断面シャフトはエアロックも兼ねつつ軸方向で最長100mの重貨物を昇降可能。またホイール外部は直径35mの各種資源タンクを最大30機係留できるタンクヤードだ。そしてトーラスの日陰面はほとんどが冷却用ヒートシンクに覆われる。
【反動ホイール】他のホイールと趣の異なるこれは、クランク運動する多数の巨大な分銅の質点移動を用いて、正味で不足する角運動量をステーションへ補充する。というのもステーションには外部から運動量が持ち込まれない一方で、建設対象の居留区シリンダーを回転させつつ長大なエレベータークレーンで組み立てるのに運動量が奪われ続けるためだ。やがてホイール等の持つ運動量も飽和してアンロードしなければならなくなるが、それを推進剤消費で行うのは資源の無駄であるから質点移動の反動を利用する。要は巨大なAMBACだ。なお急速運転は不要な振動を生むため平時からゆっくり動作し、僅かずつ他のホイールに運動量を移し蓄えている。

October 4, 2025 at 9:13 AM
【反動ホイール】他のホイールと趣の異なるこれは、クランク運動する多数の巨大な分銅の質点移動を用いて、正味で不足する角運動量をステーションへ補充する。というのもステーションには外部から運動量が持ち込まれない一方で、建設対象の居留区シリンダーを回転させつつ長大なエレベータークレーンで組み立てるのに運動量が奪われ続けるためだ。やがてホイール等の持つ運動量も飽和してアンロードしなければならなくなるが、それを推進剤消費で行うのは資源の無駄であるから質点移動の反動を利用する。要は巨大なAMBACだ。なお急速運転は不要な振動を生むため平時からゆっくり動作し、僅かずつ他のホイールに運動量を移し蓄えている。
【モーメンタムホイール】はスターボードにあるのと同じ規格のユニットで、隣の反動ホイール内へ引き抜いて整備可能だ。4機のホイールは通常は正四面体の頂点に合致する角度を持たされ、任意の2機が同時に動作不能になってもジンバルロックを起こさない冗長性を持つ。ステーションは主に月衛星軌道上にあるが中央シャフト軸は1年で太陽を1回公転していると見做せる。かつ太陽-地球-月からの潮汐力や、真円ではない軌道による揺動を常に受けているので、その外乱トルクを推進剤消費なしで常に相殺し続ける。

October 4, 2025 at 9:13 AM
【モーメンタムホイール】はスターボードにあるのと同じ規格のユニットで、隣の反動ホイール内へ引き抜いて整備可能だ。4機のホイールは通常は正四面体の頂点に合致する角度を持たされ、任意の2機が同時に動作不能になってもジンバルロックを起こさない冗長性を持つ。ステーションは主に月衛星軌道上にあるが中央シャフト軸は1年で太陽を1回公転していると見做せる。かつ太陽-地球-月からの潮汐力や、真円ではない軌道による揺動を常に受けているので、その外乱トルクを推進剤消費なしで常に相殺し続ける。
【主通信アンテナ】はごく普通の2軸支持8m級指向性パラボラだ。天頂と天底に向けた2本のブーム端に各2機ずつあり、地球と月に向けて指向し続ける。そのブームは居住トーラスの影に入らない長さ(中心から750m)であるが、無重力であるのを良いことに僅か2m角の貧弱なトラスでしかない。姿勢制御事故があると真っ先に損壊する。

October 4, 2025 at 9:13 AM
【主通信アンテナ】はごく普通の2軸支持8m級指向性パラボラだ。天頂と天底に向けた2本のブーム端に各2機ずつあり、地球と月に向けて指向し続ける。そのブームは居住トーラスの影に入らない長さ(中心から750m)であるが、無重力であるのを良いことに僅か2m角の貧弱なトラスでしかない。姿勢制御事故があると真っ先に損壊する。
【フライホイールバッテリー】(FWB)はピーク変動やホイールからの回生電力を受け入れる。これは現代実用化されている高速回転型FWBと異なり多段同軸型だ。充電はまず直径2mの軽量高速回転ホイールに行われ、過回転になろうとすると隣接するより重く遅いホイールに励磁を分けてエネルギーを移す。これを多段繰り返し最大直径70mのプレキャスト強化コンクリート造ホイールを数rpm程度で回す。発電は逆手順で低速重量ホイールから順次高速軽量ホイールへ誘導加速し、終段で3000rpm、50Hzの同期出力を取り出す。充電は誘導式、発電は同期式なので周波数変換機でもある。

October 4, 2025 at 9:13 AM
【フライホイールバッテリー】(FWB)はピーク変動やホイールからの回生電力を受け入れる。これは現代実用化されている高速回転型FWBと異なり多段同軸型だ。充電はまず直径2mの軽量高速回転ホイールに行われ、過回転になろうとすると隣接するより重く遅いホイールに励磁を分けてエネルギーを移す。これを多段繰り返し最大直径70mのプレキャスト強化コンクリート造ホイールを数rpm程度で回す。発電は逆手順で低速重量ホイールから順次高速軽量ホイールへ誘導加速し、終段で3000rpm、50Hzの同期出力を取り出す。充電は誘導式、発電は同期式なので周波数変換機でもある。
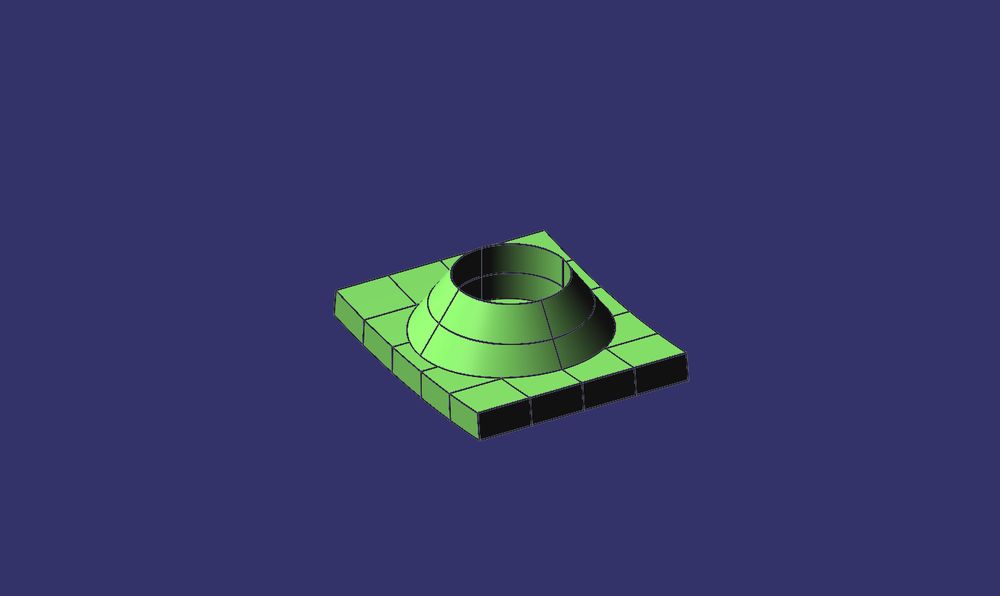
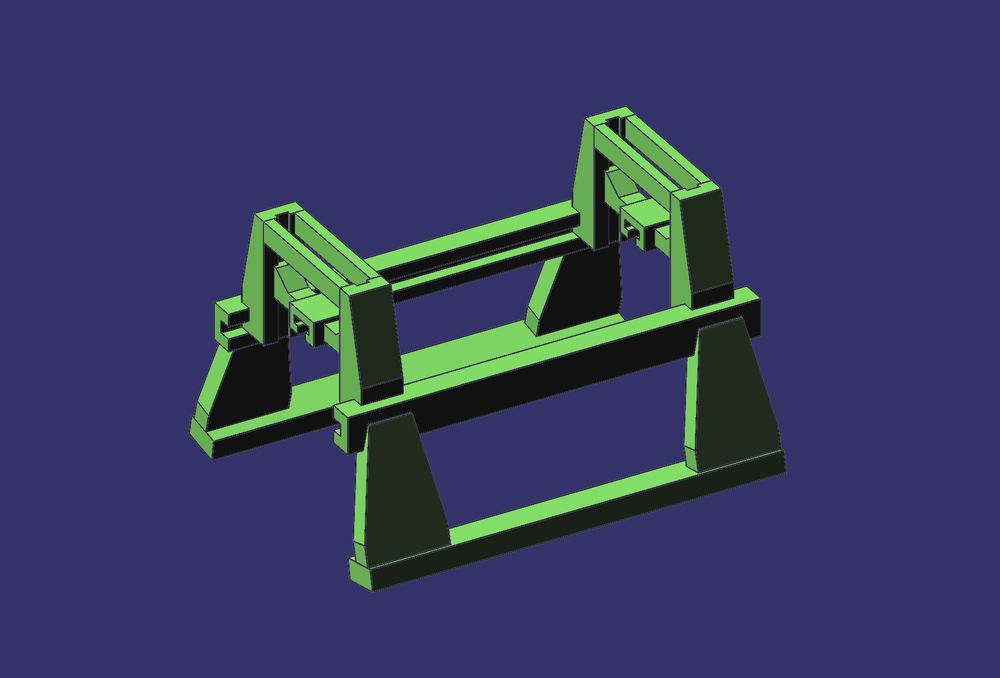
【発電ユニットの整備】ステーション全体で見ても特に消耗が激しいのがタービンユニットで、次が熱交換ユニットだ。これらは隣接する移送ホイールへ支持架台ごと容易に引き抜くことができ、数時間で交換ができる。整備前には有人有大気圧作業可能な常温まで冷やす長期の冷却期間が必要なため、交換用ユニットは10機程度が用意される。

October 3, 2025 at 11:33 AM
【発電ユニットの整備】ステーション全体で見ても特に消耗が激しいのがタービンユニットで、次が熱交換ユニットだ。これらは隣接する移送ホイールへ支持架台ごと容易に引き抜くことができ、数時間で交換ができる。整備前には有人有大気圧作業可能な常温まで冷やす長期の冷却期間が必要なため、交換用ユニットは10機程度が用意される。
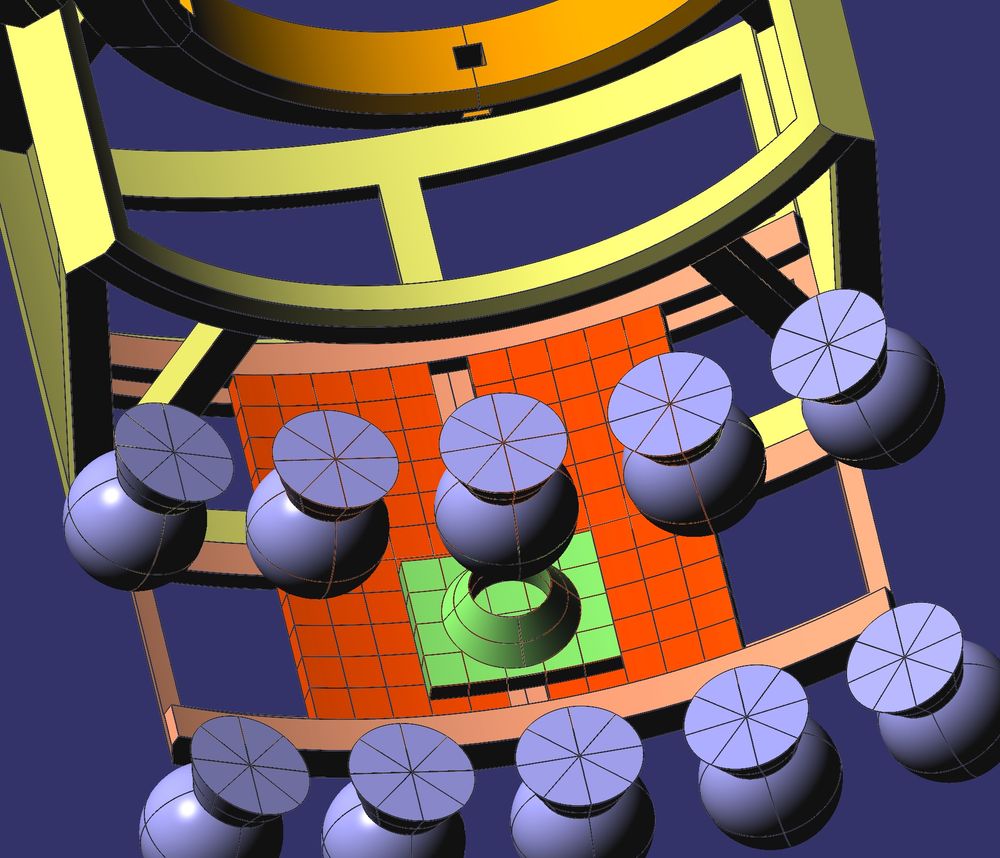
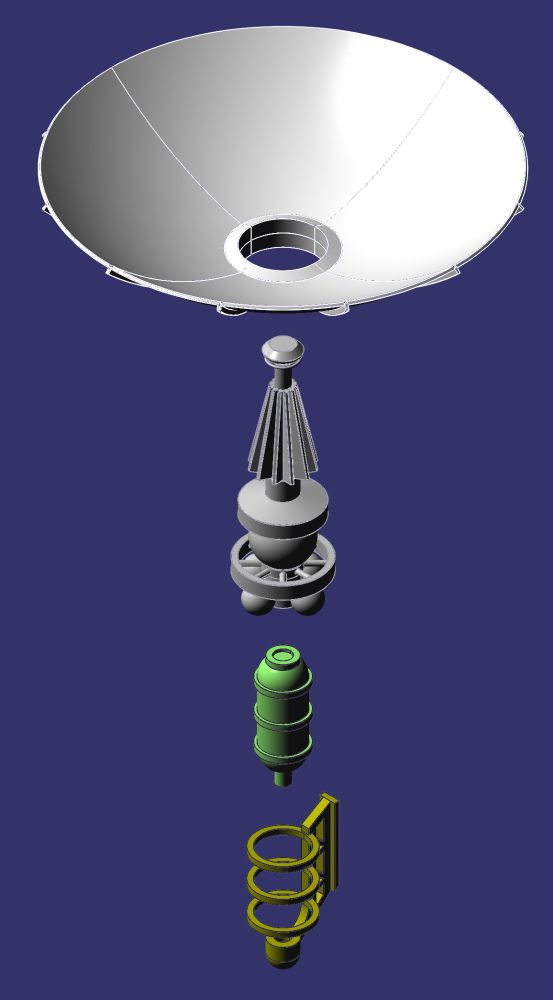
【太陽炉発電ユニット】はパラボラ鏡の太陽炉で溶融塩を加熱し、その熱から高圧蒸気をえて蒸気タービンを回す「ありきたりな」太陽熱発電システムだ。1ユニットで33kV/50Hzの三相特高交流電力を100MW以上生み出す。これはステーション全体を覆う広大な面積の太陽発電パネル(しかも放射線による経年劣化が無視できない)が高々5MWかつ直接的には直流しか得られないのと全く出力の桁と電力の質がちがう。タービンを使うがため年一度以上の補水や有人精密分解整備が必要だが、予備の交換ユニットを多数揃えてローテーションすることで、常に3ユニット以上の同時運転が維持される。

October 3, 2025 at 11:33 AM
【太陽炉発電ユニット】はパラボラ鏡の太陽炉で溶融塩を加熱し、その熱から高圧蒸気をえて蒸気タービンを回す「ありきたりな」太陽熱発電システムだ。1ユニットで33kV/50Hzの三相特高交流電力を100MW以上生み出す。これはステーション全体を覆う広大な面積の太陽発電パネル(しかも放射線による経年劣化が無視できない)が高々5MWかつ直接的には直流しか得られないのと全く出力の桁と電力の質がちがう。タービンを使うがため年一度以上の補水や有人精密分解整備が必要だが、予備の交換ユニットを多数揃えてローテーションすることで、常に3ユニット以上の同時運転が維持される。
【ポートサイド】は全体が電力プラントであり、無重力港湾施設である。常に太陽へ正対し続けるので被爆放射線強度も強く、直射日光と太陽風を遮蔽する装甲が施設の多くを占め、平時は全く無人である。寄港する宇宙船は中央シャフト内に誘導されるが、その端部は通常は開閉する天蓋装甲で閉鎖される。各4機の太陽炉発電ユニット、フライホイールバッテリー(FWB)、モーメンタムホイールと、中心距離750mのブーム端に備わる通信アンテナなどで構成される。

October 3, 2025 at 11:33 AM
【ポートサイド】は全体が電力プラントであり、無重力港湾施設である。常に太陽へ正対し続けるので被爆放射線強度も強く、直射日光と太陽風を遮蔽する装甲が施設の多くを占め、平時は全く無人である。寄港する宇宙船は中央シャフト内に誘導されるが、その端部は通常は開閉する天蓋装甲で閉鎖される。各4機の太陽炉発電ユニット、フライホイールバッテリー(FWB)、モーメンタムホイールと、中心距離750mのブーム端に備わる通信アンテナなどで構成される。
【スターボードサイド】は、ステーション建造最初期に作られる「無重力足場」だ。中央シャフトと結合されたモジュールは作業半径150mのロボアームを6〜12機備え、中央シャフト、移送リング、移送ホイールの組み立てに使われ、工事の進捗に伴って外側(右舷=太陽の反対側)へ移動していくが、最終的には他に決まった用途がなく遊休化する。シャフト内側には直径40mの姿勢制御モーメンタムホイール4機を備えたサブモジュールがあり、これもシャフトが延長されるにつれ外側へ移動してゆく。これの回転速度は(慣性質量のほうが主なので)20rpmとジャイロにしては遅い。それでも円周速度は毎時150km、遠心力は9Gに達する。

October 3, 2025 at 11:33 AM
【スターボードサイド】は、ステーション建造最初期に作られる「無重力足場」だ。中央シャフトと結合されたモジュールは作業半径150mのロボアームを6〜12機備え、中央シャフト、移送リング、移送ホイールの組み立てに使われ、工事の進捗に伴って外側(右舷=太陽の反対側)へ移動していくが、最終的には他に決まった用途がなく遊休化する。シャフト内側には直径40mの姿勢制御モーメンタムホイール4機を備えたサブモジュールがあり、これもシャフトが延長されるにつれ外側へ移動してゆく。これの回転速度は(慣性質量のほうが主なので)20rpmとジャイロにしては遅い。それでも円周速度は毎時150km、遠心力は9Gに達する。
【規格統一コンテナ】このステーションでは外形約6m立方のコンテナを多用する。左右外壁が若干内傾しているのは移送リングに隙間なく積み込むため。これは3線式集電で外部電力供給を受けることは可能だが自走能力はない。鉄輪式リニアモーター台車のフックに引っ掛けられて2方向水平移動、リフトで上下昇降、あるいはロボアームに掴まれて低重力下を3次元移動する。コンテナは用途によって気密の有無、対放射線壁や防爆装甲、危険物運搬か否かなどを分類され、個別にカスタマイズされる。緊急避難用のシェルターや機外脱出用救命筏もこのコンテナ規格で作られ、要所に必要数が配備(定期整備も交換も)される。

October 2, 2025 at 12:42 PM
【規格統一コンテナ】このステーションでは外形約6m立方のコンテナを多用する。左右外壁が若干内傾しているのは移送リングに隙間なく積み込むため。これは3線式集電で外部電力供給を受けることは可能だが自走能力はない。鉄輪式リニアモーター台車のフックに引っ掛けられて2方向水平移動、リフトで上下昇降、あるいはロボアームに掴まれて低重力下を3次元移動する。コンテナは用途によって気密の有無、対放射線壁や防爆装甲、危険物運搬か否かなどを分類され、個別にカスタマイズされる。緊急避難用のシェルターや機外脱出用救命筏もこのコンテナ規格で作られ、要所に必要数が配備(定期整備も交換も)される。
【コンテナ移送ネットワーク】図はオブジェクトの中に隠れているコンテナ移動レーンを可視化した様子。軸方向移動には無重力の中央シャフト内レーンを使用し、移送リングを介して各ホイール内の昇降シャフトに繋がる。軸と円周の2方向には鉄輪式リニアモーター(国鉄末期の無人化貨物ヤードに近い)が使われるが、重力勾配の昇降には主にラック&ピニオン=ギヤード昇降が使われる。これは地球上で普及している釣瓶式プーリー=ワイヤー高速昇降が、低重力かつ遠心回転空間では原理的に使えないためだ。一部のモジュールには集積地としてコンテナヤードがある。

October 2, 2025 at 12:42 PM
【コンテナ移送ネットワーク】図はオブジェクトの中に隠れているコンテナ移動レーンを可視化した様子。軸方向移動には無重力の中央シャフト内レーンを使用し、移送リングを介して各ホイール内の昇降シャフトに繋がる。軸と円周の2方向には鉄輪式リニアモーター(国鉄末期の無人化貨物ヤードに近い)が使われるが、重力勾配の昇降には主にラック&ピニオン=ギヤード昇降が使われる。これは地球上で普及している釣瓶式プーリー=ワイヤー高速昇降が、低重力かつ遠心回転空間では原理的に使えないためだ。一部のモジュールには集積地としてコンテナヤードがある。
【移送リング】人員やトラックサイズの小貨物を運搬するのに、いちいち巨大なホイールを動かしていては無駄の極致なので、各ホイールの間には内径160m、外径203mの移送リングが挟み込まれている。これも十分巨大だが慣性質量は移送ホイールより遥かに小さい。約6m立方の規格統一コンテナを最大90個を積載でき、中央シャフトとホイール間とでコンテナ移送ネットワークを構築する。なおリングには重心制御用のマスバランサー移動レーン(周囲の3角形の空隙)も備わっている。ホイールもそうだが総質量の5〜10%程は円周移動する無数の死重=マスバランサー(カウンターウェイト)が占めている。これでも場合によっては足りない。

October 2, 2025 at 12:42 PM
【移送リング】人員やトラックサイズの小貨物を運搬するのに、いちいち巨大なホイールを動かしていては無駄の極致なので、各ホイールの間には内径160m、外径203mの移送リングが挟み込まれている。これも十分巨大だが慣性質量は移送ホイールより遥かに小さい。約6m立方の規格統一コンテナを最大90個を積載でき、中央シャフトとホイール間とでコンテナ移送ネットワークを構築する。なおリングには重心制御用のマスバランサー移動レーン(周囲の3角形の空隙)も備わっている。ホイールもそうだが総質量の5〜10%程は円周移動する無数の死重=マスバランサー(カウンターウェイト)が占めている。これでも場合によっては足りない。
【貨物パレット】個々の巨大貨物は、各々が専用に製作された最大110m角の貨物パレットに積載されてホーイル間を運ばれる。これらは底面が「平ら」ではなくR=185mで統一されている。というのも二次元的な意味での「水平」は非ユークリッド幾何学に基づく回転空間内では「山なりのアーチ」と相似であり、端にゆくほど重力垂線に応じた角度で傾斜を強めるからだ。丸い物を落とすとそれは決して止まることなく負のフィードバックを受けて加速しつつやがて宇宙空間へ飛び出してしまう。これを避けるために貨物パレットは逆アーチの底面を持ち、すべてのモータードリーがこの仕様と原則で製作されている。


September 30, 2025 at 2:09 PM
【貨物パレット】個々の巨大貨物は、各々が専用に製作された最大110m角の貨物パレットに積載されてホーイル間を運ばれる。これらは底面が「平ら」ではなくR=185mで統一されている。というのも二次元的な意味での「水平」は非ユークリッド幾何学に基づく回転空間内では「山なりのアーチ」と相似であり、端にゆくほど重力垂線に応じた角度で傾斜を強めるからだ。丸い物を落とすとそれは決して止まることなく負のフィードバックを受けて加速しつつやがて宇宙空間へ飛び出してしまう。これを避けるために貨物パレットは逆アーチの底面を持ち、すべてのモータードリーがこの仕様と原則で製作されている。
【角運動量の移動】移送ハブの回転速度の変更は、同等の反作用を伴う。これを相殺する最も単純な手段は同等同質量の移送ホイールと相互に逆回転させることだ。それは隣接していても離れていても構わないし、1対多数の組でも良いが、最低でも2台以上の移送ホイールが同時に運用できなければならない。角運動量が正しく処理される限り動力はすべて電磁気で賄え、推進剤を消費したりはしない。現状のステーション規模では6機のホイールが運用されている。

September 30, 2025 at 2:09 PM
【角運動量の移動】移送ハブの回転速度の変更は、同等の反作用を伴う。これを相殺する最も単純な手段は同等同質量の移送ホイールと相互に逆回転させることだ。それは隣接していても離れていても構わないし、1対多数の組でも良いが、最低でも2台以上の移送ホイールが同時に運用できなければならない。角運動量が正しく処理される限り動力はすべて電磁気で賄え、推進剤を消費したりはしない。現状のステーション規模では6機のホイールが運用されている。
【移送ホイール】《倉鼠輪》の名の由来である主要巨大構造物。見た目全くそのまんま。ただし直径400m、幅150mもある。工作物の露天組み立て作業ヤードや、隣接する異なる回転速度のモジュール間で貨物の受け渡しを行う用途の超伝導駆動ホイールで、全体が電動機であり発電機であり巨大な質量を持つフライホイールである。このサイズは100x50x50mの貨物を載せたパレットを扱うことから逆算された。3方には外周に84m「降ろす」ことができるリフトと、円周方向、軸方向それぞれにパレットを移動させる複数のモータードリーを備えている。また常に無重力である中央シャフトからの搬出入開口部もある。


September 30, 2025 at 2:09 PM
【移送ホイール】《倉鼠輪》の名の由来である主要巨大構造物。見た目全くそのまんま。ただし直径400m、幅150mもある。工作物の露天組み立て作業ヤードや、隣接する異なる回転速度のモジュール間で貨物の受け渡しを行う用途の超伝導駆動ホイールで、全体が電動機であり発電機であり巨大な質量を持つフライホイールである。このサイズは100x50x50mの貨物を載せたパレットを扱うことから逆算された。3方には外周に84m「降ろす」ことができるリフトと、円周方向、軸方向それぞれにパレットを移動させる複数のモータードリーを備えている。また常に無重力である中央シャフトからの搬出入開口部もある。