


Kunal Jha
@kjha02.bsky.social
CS PhD Student @University of Washington, CSxPhilosophy @Dartmouth College
Interested in MARL, Social Reasoning, and Collective Decision making in people, machines, and other organisms
kjha02.github.io
Interested in MARL, Social Reasoning, and Collective Decision making in people, machines, and other organisms
kjha02.github.io
Sorry, try kjha02.github.io/publication/...
Modeling Others’ Minds as Code
How can AI quickly and accurately predict the behaviors of others? We show an AI which uses Large Language Models to synthesize agent behavior into Python programs, then Bayesian Inference to reason a...
kjha02.github.io
October 4, 2025 at 7:43 PM
Sorry, try kjha02.github.io/publication/...
Sorry the emoji text got messed up, url is kjha02.github.io/publication/...
Modeling Others’ Minds as Code
How can AI quickly and accurately predict the behaviors of others? We show an AI which uses Large Language Models to synthesize agent behavior into Python programs, then Bayesian Inference to reason a...
kjha02.github.io
October 3, 2025 at 11:32 PM
Sorry the emoji text got messed up, url is kjha02.github.io/publication/...
Correctly tagging @aydanhuang265.bsky.social !
October 3, 2025 at 5:28 PM
Correctly tagging @aydanhuang265.bsky.social !
For more analyses and insights, check out the paper and code: shorturl.at/siUYI
Can’t thank my collaborators @aydan_huang265, @EricYe29011995, @natashajaques.bsky.social , @maxkw.bsky.social enough for all the help and support!!!
Can’t thank my collaborators @aydan_huang265, @EricYe29011995, @natashajaques.bsky.social , @maxkw.bsky.social enough for all the help and support!!!
Modeling Others’ Minds as Code
How can AI quickly and accurately predict the behaviors of others? We show an AI which uses Large Language Models to synthesize agent behavior into Python programs, then Bayesian Inference to reason a...
shorturl.at
October 3, 2025 at 2:27 AM
For more analyses and insights, check out the paper and code: shorturl.at/siUYI
Can’t thank my collaborators @aydan_huang265, @EricYe29011995, @natashajaques.bsky.social , @maxkw.bsky.social enough for all the help and support!!!
Can’t thank my collaborators @aydan_huang265, @EricYe29011995, @natashajaques.bsky.social , @maxkw.bsky.social enough for all the help and support!!!
The big takeaway: framing behavior prediction as a program synthesis problem is an accurate, scalable, and efficient path to human-compatible AI!
It allows multi-agent systems to rapidly and accurately anticipate others' actions for more effective collaboration.
It allows multi-agent systems to rapidly and accurately anticipate others' actions for more effective collaboration.
October 3, 2025 at 2:26 AM
The big takeaway: framing behavior prediction as a program synthesis problem is an accurate, scalable, and efficient path to human-compatible AI!
It allows multi-agent systems to rapidly and accurately anticipate others' actions for more effective collaboration.
It allows multi-agent systems to rapidly and accurately anticipate others' actions for more effective collaboration.
ROTE doesn’t sacrifice accuracy for speed!
While initial program generation takes time, the inferred code can be executed rapidly, making it orders of magnitude more efficient than other LLM-based methods for long-horizon predictions.
While initial program generation takes time, the inferred code can be executed rapidly, making it orders of magnitude more efficient than other LLM-based methods for long-horizon predictions.

October 3, 2025 at 2:26 AM
ROTE doesn’t sacrifice accuracy for speed!
While initial program generation takes time, the inferred code can be executed rapidly, making it orders of magnitude more efficient than other LLM-based methods for long-horizon predictions.
While initial program generation takes time, the inferred code can be executed rapidly, making it orders of magnitude more efficient than other LLM-based methods for long-horizon predictions.
What explains this performance gap? ROTE handles complexity better. It excels with intricate tasks like cleaning and interacting with objects (e.g., turning items on/off) in Partnr, while baselines only showed success with simpler navigation and object manipulation.

October 3, 2025 at 2:26 AM
What explains this performance gap? ROTE handles complexity better. It excels with intricate tasks like cleaning and interacting with objects (e.g., turning items on/off) in Partnr, while baselines only showed success with simpler navigation and object manipulation.
We scaled up to the embodied robotics simulator Partnr, a complex, partially observable environment with goal-directed LLM-agents.
ROTE still significantly outperformed all LLM-based and behavior cloning baselines for high-level action prediction in this domain!
ROTE still significantly outperformed all LLM-based and behavior cloning baselines for high-level action prediction in this domain!

October 3, 2025 at 2:25 AM
We scaled up to the embodied robotics simulator Partnr, a complex, partially observable environment with goal-directed LLM-agents.
ROTE still significantly outperformed all LLM-based and behavior cloning baselines for high-level action prediction in this domain!
ROTE still significantly outperformed all LLM-based and behavior cloning baselines for high-level action prediction in this domain!
A key strength of code: zero-shot generalization.
Programs inferred from one environment transfer to new settings more effectively than all other baselines. ROTE's learned programs transfer without needing to re-incur the cost of text generation.
Programs inferred from one environment transfer to new settings more effectively than all other baselines. ROTE's learned programs transfer without needing to re-incur the cost of text generation.

October 3, 2025 at 2:25 AM
A key strength of code: zero-shot generalization.
Programs inferred from one environment transfer to new settings more effectively than all other baselines. ROTE's learned programs transfer without needing to re-incur the cost of text generation.
Programs inferred from one environment transfer to new settings more effectively than all other baselines. ROTE's learned programs transfer without needing to re-incur the cost of text generation.
Can scripts model nuanced, real human behavior?
We collected human gameplay data and found ROTE not only outperformed all baselines but also achieved human-level performance when predicting the trajectories of real people!
We collected human gameplay data and found ROTE not only outperformed all baselines but also achieved human-level performance when predicting the trajectories of real people!

October 3, 2025 at 2:25 AM
Can scripts model nuanced, real human behavior?
We collected human gameplay data and found ROTE not only outperformed all baselines but also achieved human-level performance when predicting the trajectories of real people!
We collected human gameplay data and found ROTE not only outperformed all baselines but also achieved human-level performance when predicting the trajectories of real people!
Introducing ROTE (Representing Others’ Trajectories as Executables)!
We use LLMs to generate Python programs 💻 that model observed behavior, then uses Bayesian inference to select the most likely ones. The result: A dynamic, composable, and analyzable predictive representation!
We use LLMs to generate Python programs 💻 that model observed behavior, then uses Bayesian inference to select the most likely ones. The result: A dynamic, composable, and analyzable predictive representation!

October 3, 2025 at 2:24 AM
Introducing ROTE (Representing Others’ Trajectories as Executables)!
We use LLMs to generate Python programs 💻 that model observed behavior, then uses Bayesian inference to select the most likely ones. The result: A dynamic, composable, and analyzable predictive representation!
We use LLMs to generate Python programs 💻 that model observed behavior, then uses Bayesian inference to select the most likely ones. The result: A dynamic, composable, and analyzable predictive representation!
Traditional AI is stuck! Predicting behavior is either brittle (Behavior Cloning) or too slow with endless belief space enumeration (Inverse Planning).
How can we avoid mental state dualism while building scalable, robust predictive models?
How can we avoid mental state dualism while building scalable, robust predictive models?
October 3, 2025 at 2:24 AM
Traditional AI is stuck! Predicting behavior is either brittle (Behavior Cloning) or too slow with endless belief space enumeration (Inverse Planning).
How can we avoid mental state dualism while building scalable, robust predictive models?
How can we avoid mental state dualism while building scalable, robust predictive models?
For the paper and code, see kjha02.github.io/publication/...
Thank you so much to my collaborators @cogscikid.bsky.social @liangyanchenggg @
@simon-du.bsky.social @maxkw.bsky.social @natashajaques.bsky.social for making the first publication of my PhD a fun one!!!
Thank you so much to my collaborators @cogscikid.bsky.social @liangyanchenggg @
@simon-du.bsky.social @maxkw.bsky.social @natashajaques.bsky.social for making the first publication of my PhD a fun one!!!
Cross-environment Cooperation Enables Zero-shot Multi-agent Coordination
How can AI develop the ability to cooperate with novel people on novel problems? We show AI learning to cooperate in “self-play” with one partner on many environments helps agents meta-learn to cooper...
kjha02.github.io
April 19, 2025 at 12:11 AM
For the paper and code, see kjha02.github.io/publication/...
Thank you so much to my collaborators @cogscikid.bsky.social @liangyanchenggg @
@simon-du.bsky.social @maxkw.bsky.social @natashajaques.bsky.social for making the first publication of my PhD a fun one!!!
Thank you so much to my collaborators @cogscikid.bsky.social @liangyanchenggg @
@simon-du.bsky.social @maxkw.bsky.social @natashajaques.bsky.social for making the first publication of my PhD a fun one!!!
The big takeaway: Environment diversity > Partner diversity
Training across diverse tasks teaches agents how to cooperate, not just whom to cooperate with. This enables zero-shot coordination with novel partners in novel environments, a critical step toward human-compatible AI.
Training across diverse tasks teaches agents how to cooperate, not just whom to cooperate with. This enables zero-shot coordination with novel partners in novel environments, a critical step toward human-compatible AI.
April 19, 2025 at 12:09 AM
The big takeaway: Environment diversity > Partner diversity
Training across diverse tasks teaches agents how to cooperate, not just whom to cooperate with. This enables zero-shot coordination with novel partners in novel environments, a critical step toward human-compatible AI.
Training across diverse tasks teaches agents how to cooperate, not just whom to cooperate with. This enables zero-shot coordination with novel partners in novel environments, a critical step toward human-compatible AI.
Our work used NiceWebRL, a Python-based package we helped develop for evaluating Human, Human-AI, and Human-Human gameplay on Jax-based RL environments!
This tool makes crowdsourcing data for CS and CogSci studies easier than ever!
Learn more: github.com/wcarvalho/ni...
This tool makes crowdsourcing data for CS and CogSci studies easier than ever!
Learn more: github.com/wcarvalho/ni...
GitHub - wcarvalho/nicewebrl: Python library for easily making web Apps to compare humans and AI
Python library for easily making web Apps to compare humans and AI - wcarvalho/nicewebrl
github.com
April 19, 2025 at 12:09 AM
Our work used NiceWebRL, a Python-based package we helped develop for evaluating Human, Human-AI, and Human-Human gameplay on Jax-based RL environments!
This tool makes crowdsourcing data for CS and CogSci studies easier than ever!
Learn more: github.com/wcarvalho/ni...
This tool makes crowdsourcing data for CS and CogSci studies easier than ever!
Learn more: github.com/wcarvalho/ni...
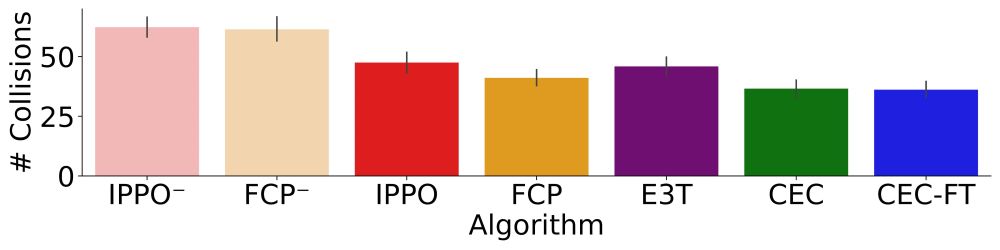
Why do humans prefer CEC agents? They collide less and adapt better to human behavior.
This increased adaptability reflects general norms for cooperation learned across many environments, not just memorized strategies.
This increased adaptability reflects general norms for cooperation learned across many environments, not just memorized strategies.
April 19, 2025 at 12:09 AM
Why do humans prefer CEC agents? They collide less and adapt better to human behavior.
This increased adaptability reflects general norms for cooperation learned across many environments, not just memorized strategies.
This increased adaptability reflects general norms for cooperation learned across many environments, not just memorized strategies.
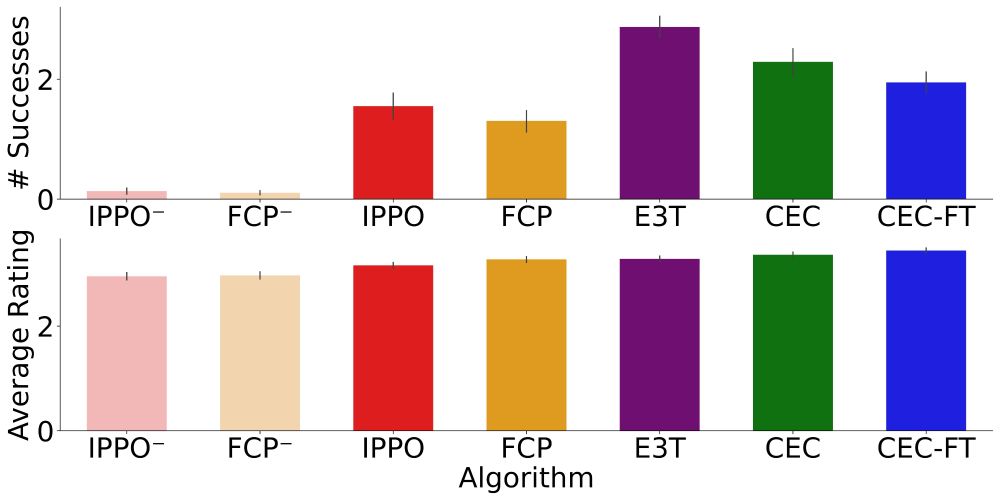
Human studies confirm our findings! CEC agents achieve higher success rates with human partners than population based methods like FCP and are rated qualitatively better to collaborate with than the SOTA approach (E3T) despite never having seen the level during training.
April 19, 2025 at 12:08 AM
Human studies confirm our findings! CEC agents achieve higher success rates with human partners than population based methods like FCP and are rated qualitatively better to collaborate with than the SOTA approach (E3T) despite never having seen the level during training.
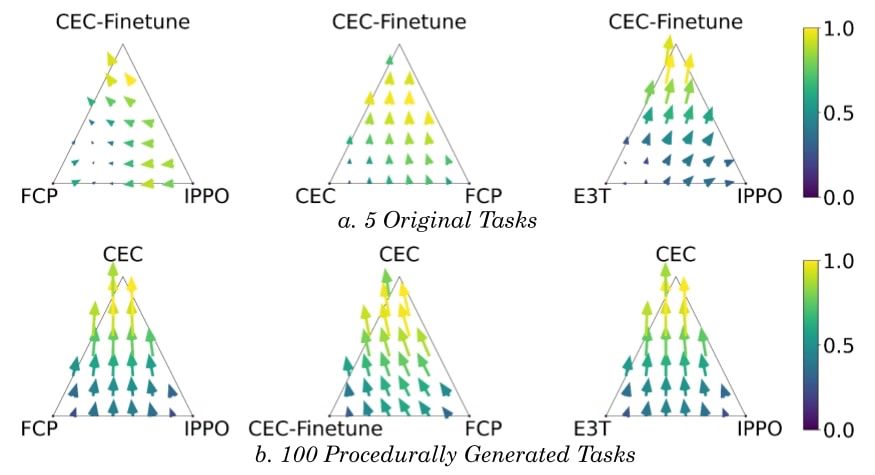
Using empirical game theory analysis, we show CEC agents emerge as the dominant strategy in a population of different agent types during Ad-hoc Teamplay!
When diverse agents must collaborate, the CEC-trained agents are selected for their adaptability and cooperative skills.
When diverse agents must collaborate, the CEC-trained agents are selected for their adaptability and cooperative skills.
April 19, 2025 at 12:08 AM
Using empirical game theory analysis, we show CEC agents emerge as the dominant strategy in a population of different agent types during Ad-hoc Teamplay!
When diverse agents must collaborate, the CEC-trained agents are selected for their adaptability and cooperative skills.
When diverse agents must collaborate, the CEC-trained agents are selected for their adaptability and cooperative skills.
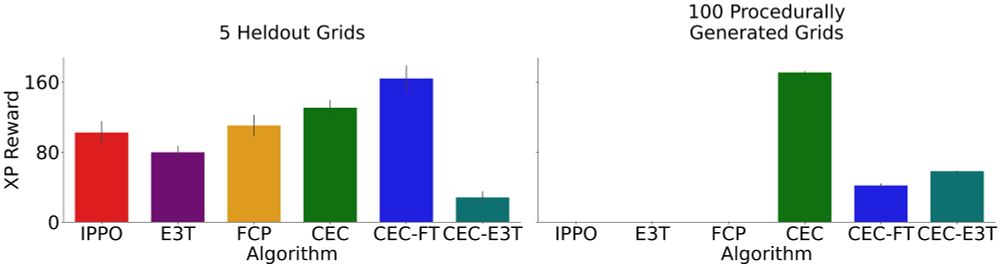
The result? CEC agents significantly outperform baselines when collaborating zero-shot with novel partners on novel environments.
Even more impressive: CEC agents outperform methods that were specifically trained on the test environment but struggle to adapt to new partners!
Even more impressive: CEC agents outperform methods that were specifically trained on the test environment but struggle to adapt to new partners!
April 19, 2025 at 12:08 AM
The result? CEC agents significantly outperform baselines when collaborating zero-shot with novel partners on novel environments.
Even more impressive: CEC agents outperform methods that were specifically trained on the test environment but struggle to adapt to new partners!
Even more impressive: CEC agents outperform methods that were specifically trained on the test environment but struggle to adapt to new partners!