



Jehan Yang
@jehanyang.bsky.social
PhD Student at CMU | Home/Caregiving Robotics
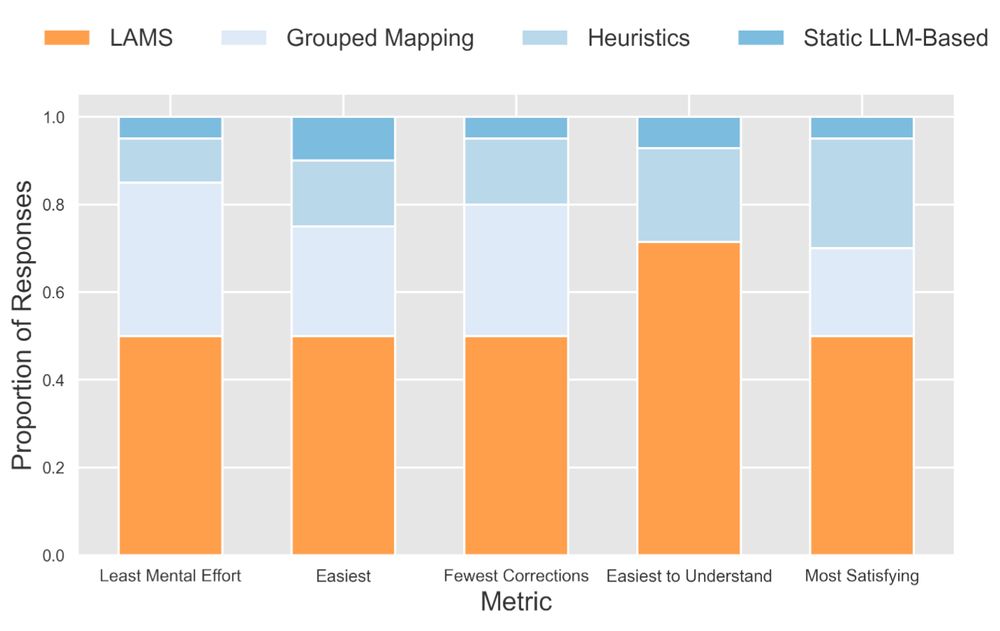
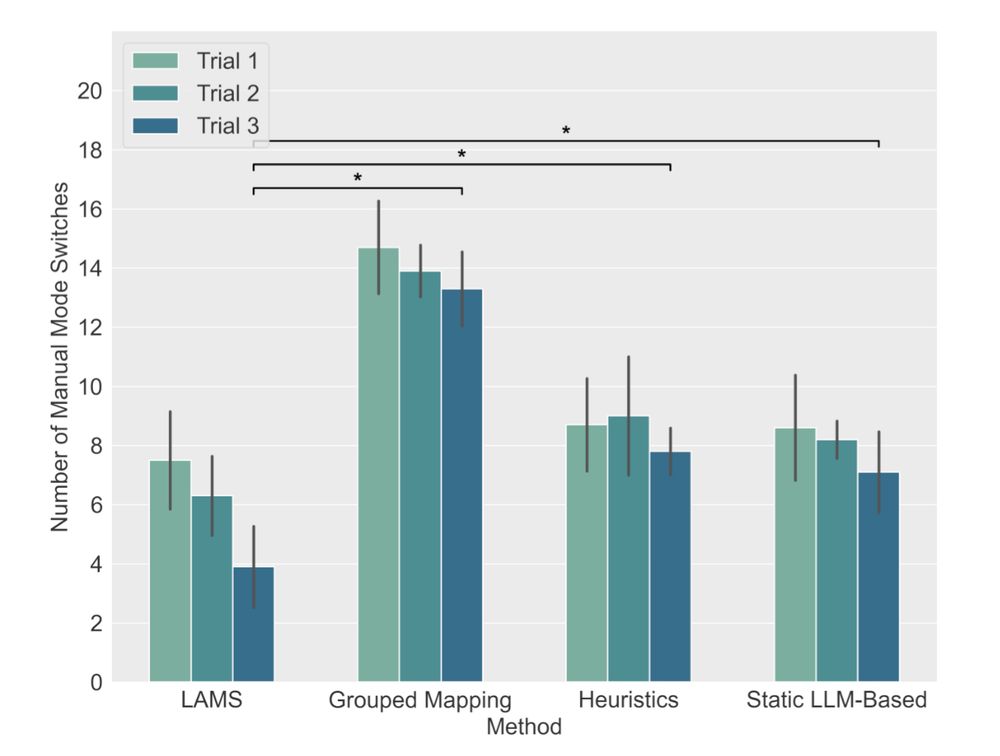
We demonstrate a strong trend toward LAMS improving based on the number of mode switches, and also find that our method is the most preferred mode switching method compared to two baselines for automatic mode switching.
(4/4)
(4/4)
March 13, 2025 at 5:41 PM
We demonstrate a strong trend toward LAMS improving based on the number of mode switches, and also find that our method is the most preferred mode switching method compared to two baselines for automatic mode switching.
(4/4)
(4/4)
LAMS leverages the strong zero-shot and few-shot prompting capabilities of LLMs. We give the LLM a single-sentence description of the task. By incorporating user-generated mode-switch examples, we show vast improvements between trials.
(3/4)
(3/4)
March 13, 2025 at 5:41 PM
LAMS leverages the strong zero-shot and few-shot prompting capabilities of LLMs. We give the LLM a single-sentence description of the task. By incorporating user-generated mode-switch examples, we show vast improvements between trials.
(3/4)
(3/4)
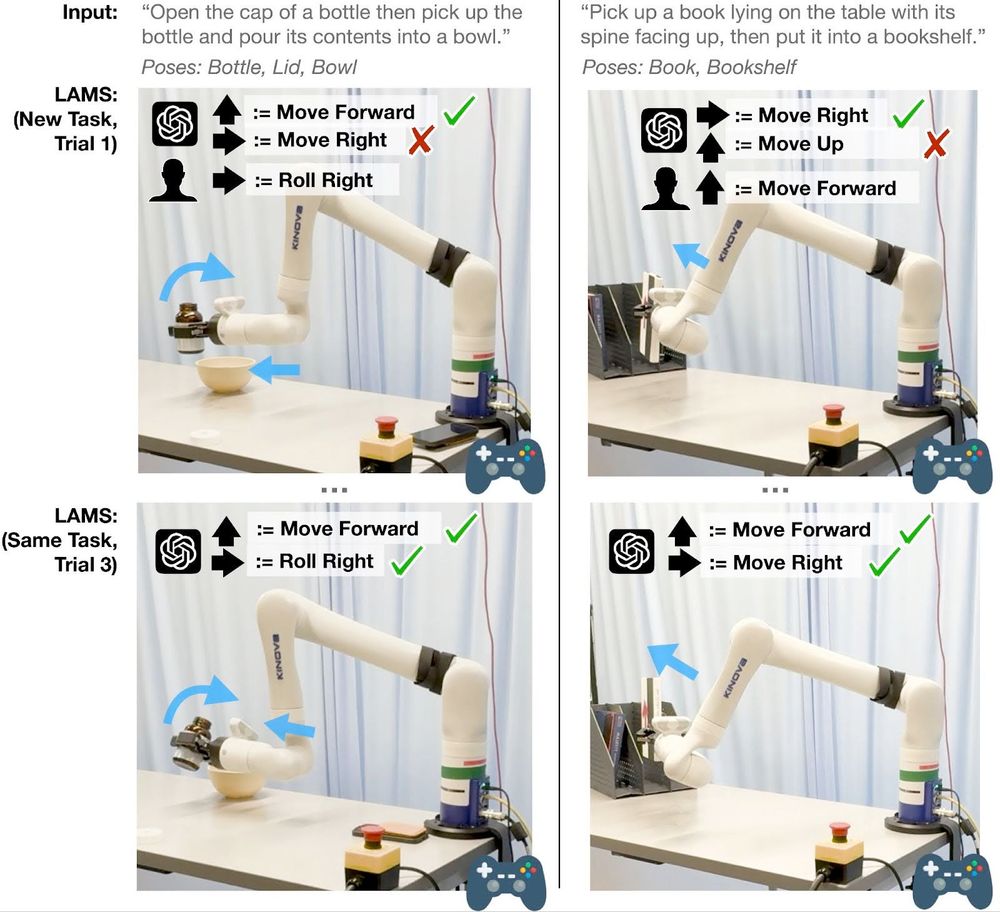
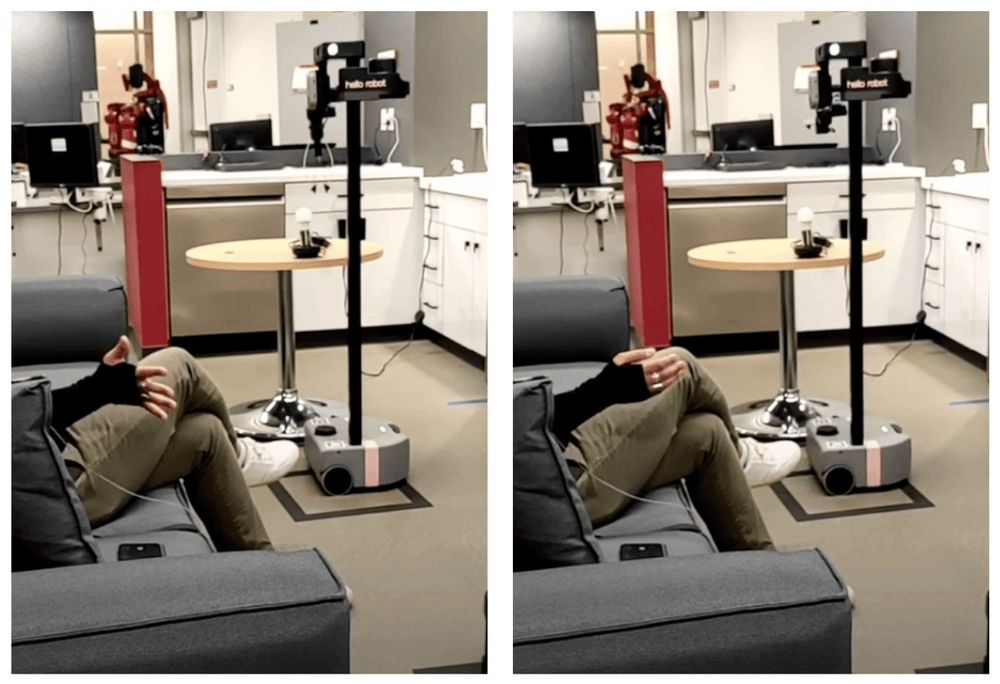
The use of LLMs for mode switching in teleoperation eliminates the need for task-specific demonstrations or predefined heuristics.
This approach is valuable when controlling a high-DoF robot arm with a joystick while doing new tasks–a common modality for users in assistive settings. (2/4)
This approach is valuable when controlling a high-DoF robot arm with a joystick while doing new tasks–a common modality for users in assistive settings. (2/4)
March 13, 2025 at 5:41 PM
The use of LLMs for mode switching in teleoperation eliminates the need for task-specific demonstrations or predefined heuristics.
This approach is valuable when controlling a high-DoF robot arm with a joystick while doing new tasks–a common modality for users in assistive settings. (2/4)
This approach is valuable when controlling a high-DoF robot arm with a joystick while doing new tasks–a common modality for users in assistive settings. (2/4)
Happy to announce our paper on LAMS: LLM-Driven Automatic Mode Switching at HRI 2025!
Our research introduces the use of off-the-shelf LLMs for automatic mode switching in robot teleoperation.
📄Paper: arxiv.org/abs/2501.08558 (1/4)
Our research introduces the use of off-the-shelf LLMs for automatic mode switching in robot teleoperation.
📄Paper: arxiv.org/abs/2501.08558 (1/4)
March 13, 2025 at 5:41 PM
Happy to announce our paper on LAMS: LLM-Driven Automatic Mode Switching at HRI 2025!
Our research introduces the use of off-the-shelf LLMs for automatic mode switching in robot teleoperation.
📄Paper: arxiv.org/abs/2501.08558 (1/4)
Our research introduces the use of off-the-shelf LLMs for automatic mode switching in robot teleoperation.
📄Paper: arxiv.org/abs/2501.08558 (1/4)
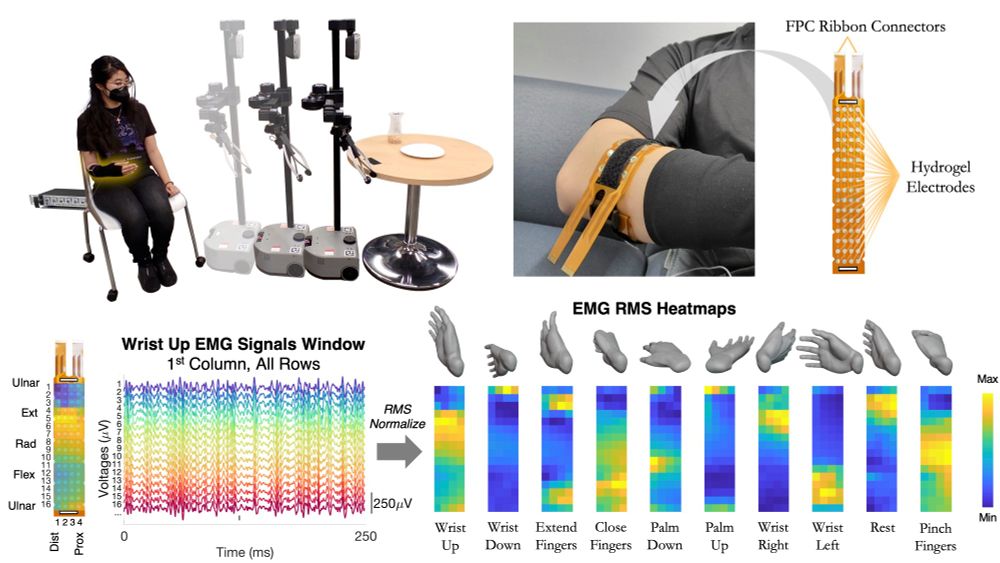
We developed a wearable sleeve and algorithm that enable real-time classification of 10 distinct gestures for controlling a robot.
The system works in just one session for each of 13 different users, paving the way for seamless integration across devices like smart devices, VR, and robotics. (2/4)
The system works in just one session for each of 13 different users, paving the way for seamless integration across devices like smart devices, VR, and robotics. (2/4)
February 20, 2025 at 3:39 PM
We developed a wearable sleeve and algorithm that enable real-time classification of 10 distinct gestures for controlling a robot.
The system works in just one session for each of 13 different users, paving the way for seamless integration across devices like smart devices, VR, and robotics. (2/4)
The system works in just one session for each of 13 different users, paving the way for seamless integration across devices like smart devices, VR, and robotics. (2/4)
Happy to announce that our paper on EMG control of robots was recently published in Nature Partner Journal in Robotics!
Our research focuses on HDEMG--a wearable neural interface technology that decodes expressive gestures from the forearm. (1/4)
📄Paper: www.nature.com/articles/s44...
Our research focuses on HDEMG--a wearable neural interface technology that decodes expressive gestures from the forearm. (1/4)
📄Paper: www.nature.com/articles/s44...
February 20, 2025 at 3:39 PM
Happy to announce that our paper on EMG control of robots was recently published in Nature Partner Journal in Robotics!
Our research focuses on HDEMG--a wearable neural interface technology that decodes expressive gestures from the forearm. (1/4)
📄Paper: www.nature.com/articles/s44...
Our research focuses on HDEMG--a wearable neural interface technology that decodes expressive gestures from the forearm. (1/4)
📄Paper: www.nature.com/articles/s44...