




Gizem Özdil
@gzmozd.bsky.social
🪰🧠🤖 currently interning @Google Deepmind | Incoming Kempner Fellow @Harvard Uni | PhD@EPFL | Previously @UniBogazici @FlatironCCN
Finally, I cannot end my words without thanking the open-source ecosystem that made this possible: OpenSim, MuJoCo, MyoSuite, and many more.
Code links:
• OpenSim optimization: github.com/gizemozd/neu...
• MuJoCo imitation learning: github.com/gizemozd/Fly...
Code links:
• OpenSim optimization: github.com/gizemozd/neu...
• MuJoCo imitation learning: github.com/gizemozd/Fly...
September 12, 2025 at 9:46 PM
Finally, I cannot end my words without thanking the open-source ecosystem that made this possible: OpenSim, MuJoCo, MyoSuite, and many more.
Code links:
• OpenSim optimization: github.com/gizemozd/neu...
• MuJoCo imitation learning: github.com/gizemozd/Fly...
Code links:
• OpenSim optimization: github.com/gizemozd/neu...
• MuJoCo imitation learning: github.com/gizemozd/Fly...
Huge thanks to my co-first author Chuanfang Ning, whose master’s thesis sparked this project, and to all co-authors: Jasper S. Phelps, Sibo Wang-Chen (@wangchen.bsky.social), Guy Elisha, Alexander Blanke, Auke Ijspeert, Pavan Ramdya (@ramdya.bsky.social).
September 12, 2025 at 9:44 PM
Huge thanks to my co-first author Chuanfang Ning, whose master’s thesis sparked this project, and to all co-authors: Jasper S. Phelps, Sibo Wang-Chen (@wangchen.bsky.social), Guy Elisha, Alexander Blanke, Auke Ijspeert, Pavan Ramdya (@ramdya.bsky.social).
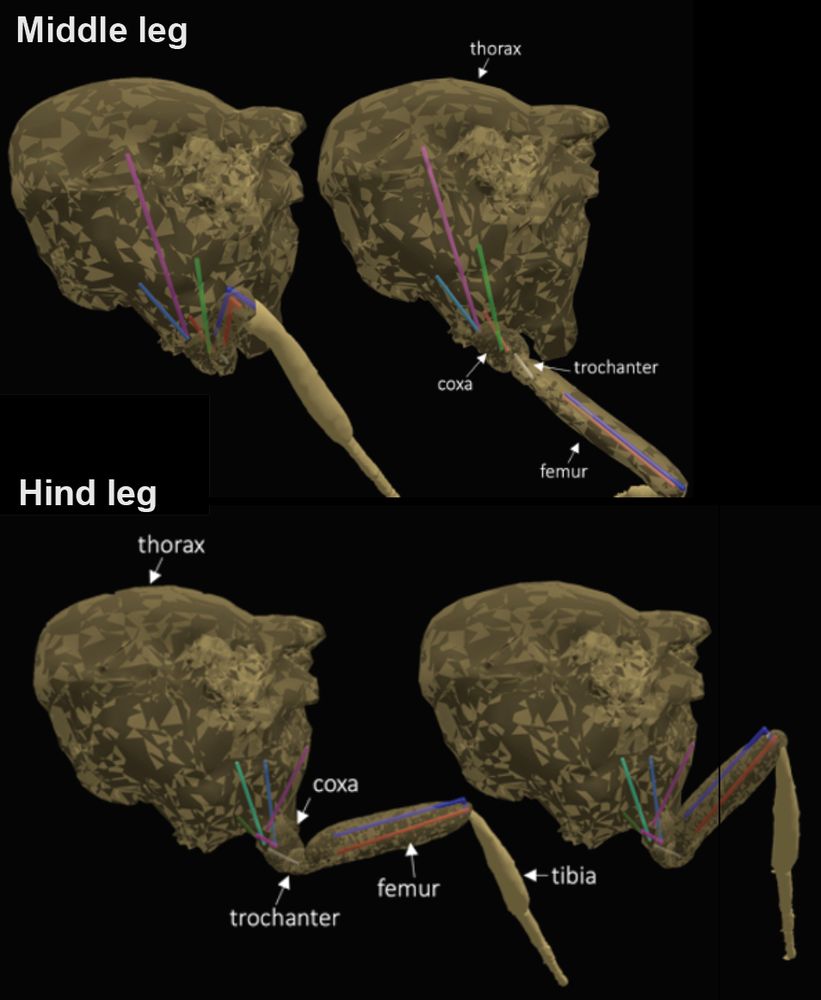
While we only optimized front-leg muscles, we provide mid & hind-leg scaffolds so their parameters can be fit next using the same pipeline. Our model bridges motor neurons and joints, paving the way for plugging more realistic neural networks derived from the connectome into embodied agents.
September 12, 2025 at 9:40 PM
While we only optimized front-leg muscles, we provide mid & hind-leg scaffolds so their parameters can be fit next using the same pipeline. Our model bridges motor neurons and joints, paving the way for plugging more realistic neural networks derived from the connectome into embodied agents.
Muscles don’t act alone; passive joint properties matter too. We ported the model to MuJoCo (via MyoConverter) for large-scale, fast simulation and set up imitation learning with muscle-driven control. We found that passive properties in the joints stabilize control and speed up learning.

September 12, 2025 at 9:36 PM
Muscles don’t act alone; passive joint properties matter too. We ported the model to MuJoCo (via MyoConverter) for large-scale, fast simulation and set up imitation learning with muscle-driven control. We found that passive properties in the joints stabilize control and speed up learning.
We've got moments arms covered—what about muscle force? Unlike in humans, most fly muscle parameters are unknown. So we built an optimization pipeline in OpenSim to identify Hill-type parameters to produce measured fly kinematics. This revealed coordinated, testable muscle synergies across behaviors
September 12, 2025 at 9:31 PM
We've got moments arms covered—what about muscle force? Unlike in humans, most fly muscle parameters are unknown. So we built an optimization pipeline in OpenSim to identify Hill-type parameters to produce measured fly kinematics. This revealed coordinated, testable muscle synergies across behaviors
We began by tracing muscle fibers, origins/insertions, and paths from high-resolution X-ray scans across specimens. This allowed us to recover moment arms around each joint center and cross-sectional area as a prior on muscle strength.
In plain terms: torque = force x moment arm.
In plain terms: torque = force x moment arm.
September 12, 2025 at 9:28 PM
We began by tracing muscle fibers, origins/insertions, and paths from high-resolution X-ray scans across specimens. This allowed us to recover moment arms around each joint center and cross-sectional area as a prior on muscle strength.
In plain terms: torque = force x moment arm.
In plain terms: torque = force x moment arm.
Thanks, Ben! Looking forward to being there :)
July 19, 2025 at 8:41 AM
Thanks, Ben! Looking forward to being there :)
Thank you so much!! I hope everything is going well for you! :)
July 16, 2025 at 8:12 PM
Thank you so much!! I hope everything is going well for you! :)
Sadly, I won’t be there in person this year because of visa issues :(( (yep, they’re real and they suck)... But two of my amazing co-organizers will be there: @satpreetsingh.bsky.social and @chingfang.bsky.social
March 27, 2025 at 11:29 AM
Sadly, I won’t be there in person this year because of visa issues :(( (yep, they’re real and they suck)... But two of my amazing co-organizers will be there: @satpreetsingh.bsky.social and @chingfang.bsky.social
Congrats!! I will be there as well, presenting another biomechanics paper ☺️
December 24, 2024 at 5:46 PM
Congrats!! I will be there as well, presenting another biomechanics paper ☺️
Thank you so much, John! I would love to hear your thoughts!
December 19, 2024 at 8:22 PM
Thank you so much, John! I would love to hear your thoughts!
10/ Big thanks to our amazing collaborators and the incredible fly community for creating the open-source tools that made this work possible. 🙌 #Neuroscience #MotorControl #Drosophila #Connectome @neuroxepfl.bsky.social @fly-eds.bsky.social @flywire.bsky.social
December 18, 2024 at 5:20 PM
10/ Big thanks to our amazing collaborators and the incredible fly community for creating the open-source tools that made this work possible. 🙌 #Neuroscience #MotorControl #Drosophila #Connectome @neuroxepfl.bsky.social @fly-eds.bsky.social @flywire.bsky.social
9/ So next time you see a fly grooming itself or you try multitasking, take a moment to appreciate the magic of coordination. Check out our preprint! 🪰🧠 www.biorxiv.org/content/10.1...
Centralized brain networks underlie body part coordination during grooming
Animals must coordinate multiple body parts to perform important tasks such as grooming, or locomotion. How this movement synchronization is achieved by the nervous system remains largely unknown. Her...
www.biorxiv.org
December 18, 2024 at 5:18 PM
9/ So next time you see a fly grooming itself or you try multitasking, take a moment to appreciate the magic of coordination. Check out our preprint! 🪰🧠 www.biorxiv.org/content/10.1...
8/ The fly’s strategy enables robustness yet flexibility, thus it may be a common blueprint for movement across species—or even for other behaviors in flies. 🐁🐱🦎
December 18, 2024 at 5:17 PM
8/ The fly’s strategy enables robustness yet flexibility, thus it may be a common blueprint for movement across species—or even for other behaviors in flies. 🐁🐱🦎
7/ Recurrent excitation: Drives non-groomed antennal pitch movements and keeps other motor networks in sync. ⚡️
Broadcast inhibition: Suppresses targeted antennal movement to prevent conflicting actions. ⛔️
Broadcast inhibition: Suppresses targeted antennal movement to prevent conflicting actions. ⛔️

December 18, 2024 at 5:16 PM
7/ Recurrent excitation: Drives non-groomed antennal pitch movements and keeps other motor networks in sync. ⚡️
Broadcast inhibition: Suppresses targeted antennal movement to prevent conflicting actions. ⛔️
Broadcast inhibition: Suppresses targeted antennal movement to prevent conflicting actions. ⛔️