




Gizem Özdil
@gzmozd.bsky.social
🪰🧠🤖 currently interning @Google Deepmind | Incoming Kempner Fellow @Harvard Uni | PhD@EPFL | Previously @UniBogazici @FlatironCCN
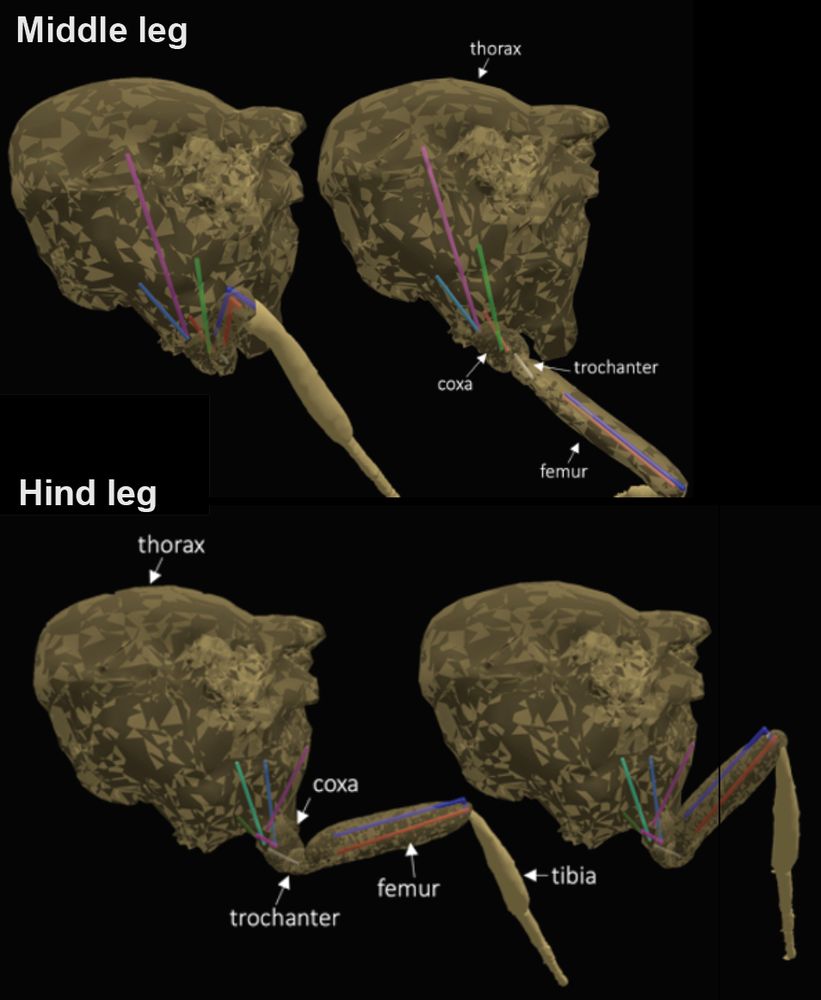
While we only optimized front-leg muscles, we provide mid & hind-leg scaffolds so their parameters can be fit next using the same pipeline. Our model bridges motor neurons and joints, paving the way for plugging more realistic neural networks derived from the connectome into embodied agents.
September 12, 2025 at 9:40 PM
While we only optimized front-leg muscles, we provide mid & hind-leg scaffolds so their parameters can be fit next using the same pipeline. Our model bridges motor neurons and joints, paving the way for plugging more realistic neural networks derived from the connectome into embodied agents.
Muscles don’t act alone; passive joint properties matter too. We ported the model to MuJoCo (via MyoConverter) for large-scale, fast simulation and set up imitation learning with muscle-driven control. We found that passive properties in the joints stabilize control and speed up learning.

September 12, 2025 at 9:36 PM
Muscles don’t act alone; passive joint properties matter too. We ported the model to MuJoCo (via MyoConverter) for large-scale, fast simulation and set up imitation learning with muscle-driven control. We found that passive properties in the joints stabilize control and speed up learning.
We've got moments arms covered—what about muscle force? Unlike in humans, most fly muscle parameters are unknown. So we built an optimization pipeline in OpenSim to identify Hill-type parameters to produce measured fly kinematics. This revealed coordinated, testable muscle synergies across behaviors
September 12, 2025 at 9:31 PM
We've got moments arms covered—what about muscle force? Unlike in humans, most fly muscle parameters are unknown. So we built an optimization pipeline in OpenSim to identify Hill-type parameters to produce measured fly kinematics. This revealed coordinated, testable muscle synergies across behaviors
We began by tracing muscle fibers, origins/insertions, and paths from high-resolution X-ray scans across specimens. This allowed us to recover moment arms around each joint center and cross-sectional area as a prior on muscle strength.
In plain terms: torque = force x moment arm.
In plain terms: torque = force x moment arm.
September 12, 2025 at 9:28 PM
We began by tracing muscle fibers, origins/insertions, and paths from high-resolution X-ray scans across specimens. This allowed us to recover moment arms around each joint center and cross-sectional area as a prior on muscle strength.
In plain terms: torque = force x moment arm.
In plain terms: torque = force x moment arm.
🪰 How do dozens of tiny fly muscles cooperate to move a leg?
We’re excited to share the first 3D, data-driven musculoskeletal model of Drosophila legs based on Hill-type muscles, running in OpenSim and MuJoCo simulation environments.
Preprint: arxiv.org/abs/2509.06426
We’re excited to share the first 3D, data-driven musculoskeletal model of Drosophila legs based on Hill-type muscles, running in OpenSim and MuJoCo simulation environments.
Preprint: arxiv.org/abs/2509.06426
September 12, 2025 at 9:26 PM
🪰 How do dozens of tiny fly muscles cooperate to move a leg?
We’re excited to share the first 3D, data-driven musculoskeletal model of Drosophila legs based on Hill-type muscles, running in OpenSim and MuJoCo simulation environments.
Preprint: arxiv.org/abs/2509.06426
We’re excited to share the first 3D, data-driven musculoskeletal model of Drosophila legs based on Hill-type muscles, running in OpenSim and MuJoCo simulation environments.
Preprint: arxiv.org/abs/2509.06426
Only 4 days to go until our workshop!! 🪰🐁🤖
If you're at COSYNE, don't miss out on incredible talks and inspiring panel discussions at "Agent-Based Models in Neuroscience: Complex Planning, Embodiment, and Beyond" on March 31 :)
Check out the latest schedule: neuro-agent-models.github.io
If you're at COSYNE, don't miss out on incredible talks and inspiring panel discussions at "Agent-Based Models in Neuroscience: Complex Planning, Embodiment, and Beyond" on March 31 :)
Check out the latest schedule: neuro-agent-models.github.io

March 27, 2025 at 11:27 AM
Only 4 days to go until our workshop!! 🪰🐁🤖
If you're at COSYNE, don't miss out on incredible talks and inspiring panel discussions at "Agent-Based Models in Neuroscience: Complex Planning, Embodiment, and Beyond" on March 31 :)
Check out the latest schedule: neuro-agent-models.github.io
If you're at COSYNE, don't miss out on incredible talks and inspiring panel discussions at "Agent-Based Models in Neuroscience: Complex Planning, Embodiment, and Beyond" on March 31 :)
Check out the latest schedule: neuro-agent-models.github.io
7/ Recurrent excitation: Drives non-groomed antennal pitch movements and keeps other motor networks in sync. ⚡️
Broadcast inhibition: Suppresses targeted antennal movement to prevent conflicting actions. ⛔️
Broadcast inhibition: Suppresses targeted antennal movement to prevent conflicting actions. ⛔️

December 18, 2024 at 5:16 PM
7/ Recurrent excitation: Drives non-groomed antennal pitch movements and keeps other motor networks in sync. ⚡️
Broadcast inhibition: Suppresses targeted antennal movement to prevent conflicting actions. ⛔️
Broadcast inhibition: Suppresses targeted antennal movement to prevent conflicting actions. ⛔️
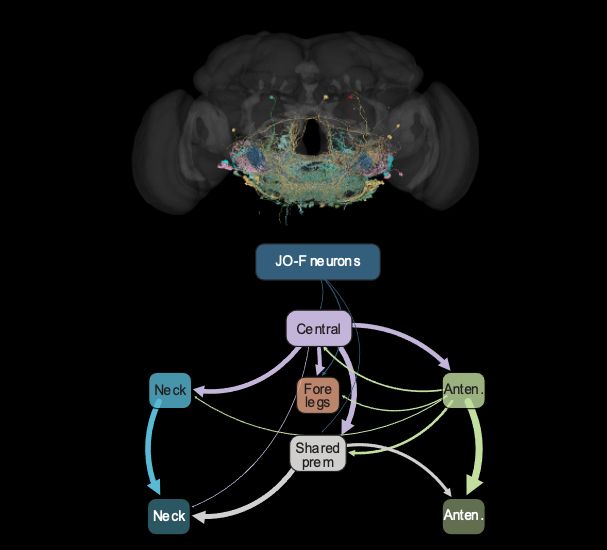
4/ So, what orchestrates these movements? Using the fly connectome, we constructed a subnetwork for antennal grooming. In this network, we discovered that a central group of neurons links motor circuits for the neck, antennae, and forelegs. 🧠 These neurons act as a hub for coordinating body parts.
December 18, 2024 at 5:12 PM
4/ So, what orchestrates these movements? Using the fly connectome, we constructed a subnetwork for antennal grooming. In this network, we discovered that a central group of neurons links motor circuits for the neck, antennae, and forelegs. 🧠 These neurons act as a hub for coordinating body parts.
3-2/ EVEN without antennae, the coordination between head rotations and foreleg movements remains! 😱😱😱
December 18, 2024 at 5:10 PM
3-2/ EVEN without antennae, the coordination between head rotations and foreleg movements remains! 😱😱😱
3-1/ Or, head-immobilized flies will still move their antennae and forelegs in a fascinatingly coordinated fashion. 🤯
December 18, 2024 at 5:08 PM
3-1/ Or, head-immobilized flies will still move their antennae and forelegs in a fascinatingly coordinated fashion. 🤯
3/ Surprisingly, each body part operates independently of the others' sensory feedback. Even with amputated forelegs, flies still move their antennae and head! This suggests an open-loop (not feedback-based) coordination mechanism. 🤖
December 18, 2024 at 5:05 PM
3/ Surprisingly, each body part operates independently of the others' sensory feedback. Even with amputated forelegs, flies still move their antennae and head! This suggests an open-loop (not feedback-based) coordination mechanism. 🤖
2/ By simulating these motions in a biomechanical model, we discovered the reason: synchronization ensures forceful and unobstructed interactions between the forelegs and antennae. This efficiency guarantees a thorough cleaning job. 💪✨
December 18, 2024 at 5:03 PM
2/ By simulating these motions in a biomechanical model, we discovered the reason: synchronization ensures forceful and unobstructed interactions between the forelegs and antennae. This efficiency guarantees a thorough cleaning job. 💪✨
1/ In our study, we explored how flies synchronize their head, antennae, and forelegs during goal-directed antennal grooming. We found that when targeting an antenna, flies perform three distinct motor actions. But why these specific movements?
December 18, 2024 at 5:02 PM
1/ In our study, we explored how flies synchronize their head, antennae, and forelegs during goal-directed antennal grooming. We found that when targeting an antenna, flies perform three distinct motor actions. But why these specific movements?
🧵 Ever seen a fly perform a full self-care ritual? 🪰 They meticulously rub their head and clean their antennae, ensuring every speck of dirt is gone. But how do they coordinate all those tiny body parts so seamlessly?👇
December 18, 2024 at 5:01 PM
🧵 Ever seen a fly perform a full self-care ritual? 🪰 They meticulously rub their head and clean their antennae, ensuring every speck of dirt is gone. But how do they coordinate all those tiny body parts so seamlessly?👇