



@braraki.bsky.social
Reposted
"As researchers, we tend to publish only positive results, but I think a lot of valuable insights are lost in our unpublished failures."
New blog post: Getting SAC to Work on a Massive Parallel Simulator (part I)
araffin.github.io/post/sac-mas...
New blog post: Getting SAC to Work on a Massive Parallel Simulator (part I)
araffin.github.io/post/sac-mas...
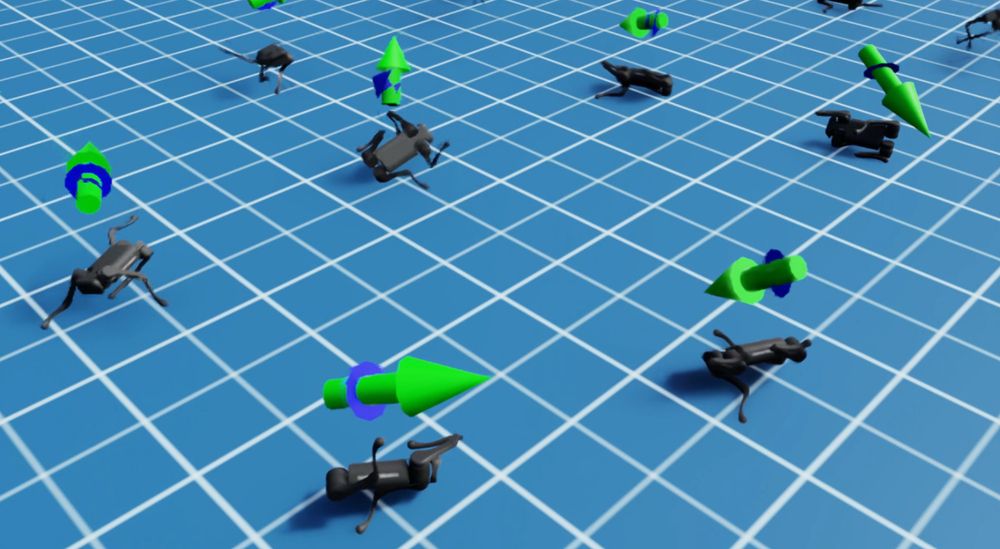
Getting SAC to Work on a Massive Parallel Simulator: An RL Journey With Off-Policy Algorithms (Part I) | Antonin Raffin | Homepage
This post details how I managed to get the Soft-Actor Critic (SAC) and other off-policy reinforcement learning algorithms to work on massively parallel simulators (think Isaac Sim with thousands of ro...
araffin.github.io
March 10, 2025 at 8:22 AM
"As researchers, we tend to publish only positive results, but I think a lot of valuable insights are lost in our unpublished failures."
New blog post: Getting SAC to Work on a Massive Parallel Simulator (part I)
araffin.github.io/post/sac-mas...
New blog post: Getting SAC to Work on a Massive Parallel Simulator (part I)
araffin.github.io/post/sac-mas...
Reposted

Introducing playground.mujoco.org
Combining MuJoCo’s rich and thriving ecosystem, massively parallel GPU-accelerated simulation, and real-world results across a diverse range of robot platforms: quadrupeds, humanoids, dexterous hands, and arms.
Get started today: pip install playground
Combining MuJoCo’s rich and thriving ecosystem, massively parallel GPU-accelerated simulation, and real-world results across a diverse range of robot platforms: quadrupeds, humanoids, dexterous hands, and arms.
Get started today: pip install playground
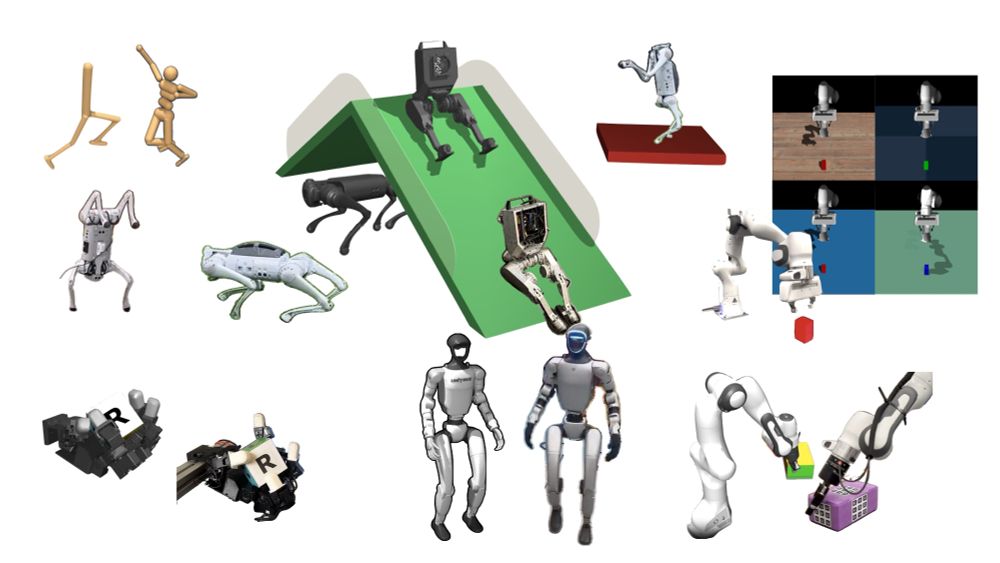
MuJoCo Playground
An open-source framework for GPU-accelerated robot learning and sim-to-real transfer
playground.mujoco.org
January 16, 2025 at 8:48 PM
Introducing playground.mujoco.org
Combining MuJoCo’s rich and thriving ecosystem, massively parallel GPU-accelerated simulation, and real-world results across a diverse range of robot platforms: quadrupeds, humanoids, dexterous hands, and arms.
Get started today: pip install playground
Combining MuJoCo’s rich and thriving ecosystem, massively parallel GPU-accelerated simulation, and real-world results across a diverse range of robot platforms: quadrupeds, humanoids, dexterous hands, and arms.
Get started today: pip install playground
Reposted

Ever wondered why presenting more facts can sometimes *worsen* disagreements, even among rational people? 🤔
It turns out, Bayesian reasoning has some surprising answers - no cognitive biases needed! Let's explore this fascinating paradox quickly ☺️
It turns out, Bayesian reasoning has some surprising answers - no cognitive biases needed! Let's explore this fascinating paradox quickly ☺️
January 7, 2025 at 10:25 PM
Ever wondered why presenting more facts can sometimes *worsen* disagreements, even among rational people? 🤔
It turns out, Bayesian reasoning has some surprising answers - no cognitive biases needed! Let's explore this fascinating paradox quickly ☺️
It turns out, Bayesian reasoning has some surprising answers - no cognitive biases needed! Let's explore this fascinating paradox quickly ☺️
Reposted

Yesterday the hyped Genesis simulator released. But it's up to 10x slower than existing GPU sims, not 10-80x faster or 430,000x faster than realtime since they benchmark mostly static environments
blog post with corrected open source benchmarks & details: stoneztao.substack.com/p/the-new-hy...
blog post with corrected open source benchmarks & details: stoneztao.substack.com/p/the-new-hy...


December 20, 2024 at 11:49 PM
Yesterday the hyped Genesis simulator released. But it's up to 10x slower than existing GPU sims, not 10-80x faster or 430,000x faster than realtime since they benchmark mostly static environments
blog post with corrected open source benchmarks & details: stoneztao.substack.com/p/the-new-hy...
blog post with corrected open source benchmarks & details: stoneztao.substack.com/p/the-new-hy...