


Antonin Raffin
@araffin.bsky.social
Researcher in robotics and machine learning (Reinforcement Learning). Maintainer of Stable-Baselines (SB3).
https://araffin.github.io/
https://araffin.github.io/
A wonderful collection of spurious correlations, correlation is not causation.
link: www.tylervigen.com/spurious-cor...
found via @stefanjudis.com newsletter
link: www.tylervigen.com/spurious-cor...
found via @stefanjudis.com newsletter

October 21, 2025 at 5:44 AM
A wonderful collection of spurious correlations, correlation is not causation.
link: www.tylervigen.com/spurious-cor...
found via @stefanjudis.com newsletter
link: www.tylervigen.com/spurious-cor...
found via @stefanjudis.com newsletter
Training a small humanoid robot with reinforcement learning using another robot for reset.
by Kaizhe Hu et al. (ToddlerBot Stanford)
Project page: robot-trains-robot.github.io
by Kaizhe Hu et al. (ToddlerBot Stanford)
Project page: robot-trains-robot.github.io

September 29, 2025 at 8:48 AM
Training a small humanoid robot with reinforcement learning using another robot for reset.
by Kaizhe Hu et al. (ToddlerBot Stanford)
Project page: robot-trains-robot.github.io
by Kaizhe Hu et al. (ToddlerBot Stanford)
Project page: robot-trains-robot.github.io
Get ready to watch an astronaut from the ISS 🛰️ control our robots tomorrow at 13:20 (Munich Time), one of them being our favorite little happy hopper Bert =)
Link: m.youtube.com/watch?v=m4Y5...
Link: m.youtube.com/watch?v=m4Y5...

July 23, 2025 at 2:32 PM
Get ready to watch an astronaut from the ISS 🛰️ control our robots tomorrow at 13:20 (Munich Time), one of them being our favorite little happy hopper Bert =)
Link: m.youtube.com/watch?v=m4Y5...
Link: m.youtube.com/watch?v=m4Y5...
*you need dark mode for that
(it's then written white on black)
(it's then written white on black)

July 5, 2025 at 8:30 PM
*you need dark mode for that
(it's then written white on black)
(it's then written white on black)
There are some milestones to celebrate for Stable-Baselines3 (SB3) 🎉!
- 10k+ stars on @github.com
- 9M+ downloads on @pypi.org
- 3300+ citations for the JMLR paper
- 1000 citations for the SB2 repository
I would especially like to thank the maintainers and our contributors!
- 10k+ stars on @github.com
- 9M+ downloads on @pypi.org
- 3300+ citations for the JMLR paper
- 1000 citations for the SB2 repository
I would especially like to thank the maintainers and our contributors!

July 2, 2025 at 3:53 PM
There are some milestones to celebrate for Stable-Baselines3 (SB3) 🎉!
- 10k+ stars on @github.com
- 9M+ downloads on @pypi.org
- 3300+ citations for the JMLR paper
- 1000 citations for the SB2 repository
I would especially like to thank the maintainers and our contributors!
- 10k+ stars on @github.com
- 9M+ downloads on @pypi.org
- 3300+ citations for the JMLR paper
- 1000 citations for the SB2 repository
I would especially like to thank the maintainers and our contributors!
RL Is Hard (Episode #35753)
Debugging why PPO SB3 (PyTorch) was working where PPO SBX (Jax) was failing.
Just one line of code different... 🙈 (the initialization of the actor network output)
Debugging why PPO SB3 (PyTorch) was working where PPO SBX (Jax) was failing.
Just one line of code different... 🙈 (the initialization of the actor network output)

June 23, 2025 at 11:25 AM
RL Is Hard (Episode #35753)
Debugging why PPO SB3 (PyTorch) was working where PPO SBX (Jax) was failing.
Just one line of code different... 🙈 (the initialization of the actor network output)
Debugging why PPO SB3 (PyTorch) was working where PPO SBX (Jax) was failing.
Just one line of code different... 🙈 (the initialization of the actor network output)
New in SB3 (master branch): to use n-step returns for off-policy algorithms, simply pass `n_steps=3` (it will instantiate a `NStepReplayBuffer` being the scene).
Our implementation does not use any for loops, only NumPy vectorised operations at sampling time (so the data container stays the same).
Our implementation does not use any for loops, only NumPy vectorised operations at sampling time (so the data container stays the same).

June 16, 2025 at 10:52 AM
New in SB3 (master branch): to use n-step returns for off-policy algorithms, simply pass `n_steps=3` (it will instantiate a `NStepReplayBuffer` being the scene).
Our implementation does not use any for loops, only NumPy vectorised operations at sampling time (so the data container stays the same).
Our implementation does not use any for loops, only NumPy vectorised operations at sampling time (so the data container stays the same).
For a small OpenCV code to play with the latent space, you can have a look at github.com/araffin/aae-...

February 27, 2025 at 5:31 PM
For a small OpenCV code to play with the latent space, you can have a look at github.com/araffin/aae-...
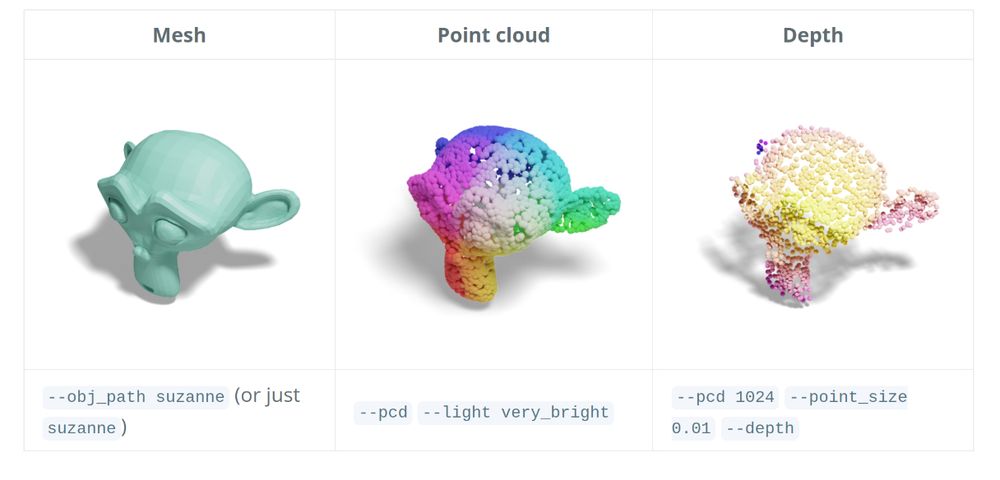
Publication-ready visualization of 3D objects and point clouds in seconds, using @blender.org and BlenderProc.
hummat.github.io/bproc-pubvis/
hummat.github.io/bproc-pubvis/
December 9, 2024 at 10:11 AM
Publication-ready visualization of 3D objects and point clouds in seconds, using @blender.org and BlenderProc.
hummat.github.io/bproc-pubvis/
hummat.github.io/bproc-pubvis/
If you want to use Stable-Baselines3 (or SBX) with DeepMind Control RL environments (dm suite), this is all you need to do.
Gist: gist.github.com/araffin/534f...
Btw, I'm looking for contributors to add dm control tasks to the RL Zoo.
Gist: gist.github.com/araffin/534f...
Btw, I'm looking for contributors to add dm control tasks to the RL Zoo.

November 24, 2024 at 6:06 PM
If you want to use Stable-Baselines3 (or SBX) with DeepMind Control RL environments (dm suite), this is all you need to do.
Gist: gist.github.com/araffin/534f...
Btw, I'm looking for contributors to add dm control tasks to the RL Zoo.
Gist: gist.github.com/araffin/534f...
Btw, I'm looking for contributors to add dm control tasks to the RL Zoo.
On Friday, I'll be in Nancy at the Humanoid Soccer Robots Workshop (Humanoids Conference 2024) to talk about
"Ingredients for Learning Locomotion Directly on Real Hardware".
My colleagues from DLR will also present some robot demos.
Slides: araffin.github.io/talk/ingredi...
"Ingredients for Learning Locomotion Directly on Real Hardware".
My colleagues from DLR will also present some robot demos.
Slides: araffin.github.io/talk/ingredi...
November 19, 2024 at 5:13 PM
On Friday, I'll be in Nancy at the Humanoid Soccer Robots Workshop (Humanoids Conference 2024) to talk about
"Ingredients for Learning Locomotion Directly on Real Hardware".
My colleagues from DLR will also present some robot demos.
Slides: araffin.github.io/talk/ingredi...
"Ingredients for Learning Locomotion Directly on Real Hardware".
My colleagues from DLR will also present some robot demos.
Slides: araffin.github.io/talk/ingredi...
Quick Python tip to improve error messages.
When you throw an exception for an invalid value, give the user some feedback on what exactly that value was.
We tried to follow this principle in our gym env checker: github.com/DLR-RM/stabl...
When you throw an exception for an invalid value, give the user some feedback on what exactly that value was.
We tried to follow this principle in our gym env checker: github.com/DLR-RM/stabl...

November 11, 2024 at 4:32 PM
Quick Python tip to improve error messages.
When you throw an exception for an invalid value, give the user some feedback on what exactly that value was.
We tried to follow this principle in our gym env checker: github.com/DLR-RM/stabl...
When you throw an exception for an invalid value, give the user some feedback on what exactly that value was.
We tried to follow this principle in our gym env checker: github.com/DLR-RM/stabl...
