




AirLab
@airlabcmu.bsky.social
We develop perception, control, & planning algorithms for robot autonomy.
theairlab.org
@cmurobotics.bsky.social | http://youtube.com/airlab
theairlab.org
@cmurobotics.bsky.social | http://youtube.com/airlab
🦼🤖 Sneak peek: Beyond our own ATV autonomy results, we have also been pushing towards:
1. More challenging scenarios (Nighttime)
2. More robot platforms (quadruped & urban wheelchair) (5/5)
1. More challenging scenarios (Nighttime)
2. More robot platforms (quadruped & urban wheelchair) (5/5)
April 8, 2025 at 6:49 PM
🦼🤖 Sneak peek: Beyond our own ATV autonomy results, we have also been pushing towards:
1. More challenging scenarios (Nighttime)
2. More robot platforms (quadruped & urban wheelchair) (5/5)
1. More challenging scenarios (Nighttime)
2. More robot platforms (quadruped & urban wheelchair) (5/5)
🗄️ What powers all this: multi-modal data, which we provide to everyone through TartanDrive 2.0, a large-scale off-road driving dataset for self-supervised learning tasks. Check out the data here: theairlab.org/TartanDrive2/ (4/5)
April 8, 2025 at 6:49 PM
🗄️ What powers all this: multi-modal data, which we provide to everyone through TartanDrive 2.0, a large-scale off-road driving dataset for self-supervised learning tasks. Check out the data here: theairlab.org/TartanDrive2/ (4/5)
📍Since there is no prior map or GPS, our system relies on SLAM to track position and build a local understanding of the environment in real-time, enabling consistent perception across diverse terrains.
See the voxel grid from our SLAM point cloud colored by VFM features (3/5)
See the voxel grid from our SLAM point cloud colored by VFM features (3/5)
April 8, 2025 at 6:49 PM
📍Since there is no prior map or GPS, our system relies on SLAM to track position and build a local understanding of the environment in real-time, enabling consistent perception across diverse terrains.
See the voxel grid from our SLAM point cloud colored by VFM features (3/5)
See the voxel grid from our SLAM point cloud colored by VFM features (3/5)
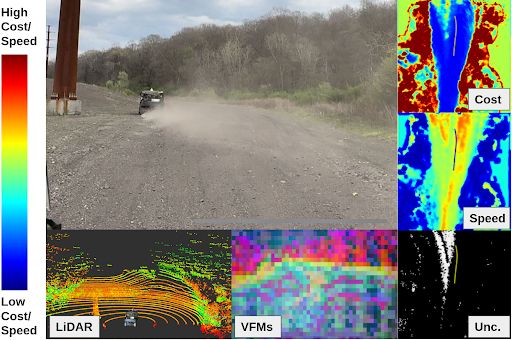
🧠 3 key principles: Self-supervised, Multi-modality, and Uncertainty Awareness.
Our system uses multi-modality (LiDAR+camera) data and learns by itself where to go (traversability) while balancing risk (uncertainty) and performance with inverse reinforcement learning. (2/5)
Our system uses multi-modality (LiDAR+camera) data and learns by itself where to go (traversability) while balancing risk (uncertainty) and performance with inverse reinforcement learning. (2/5)
April 8, 2025 at 6:49 PM
🧠 3 key principles: Self-supervised, Multi-modality, and Uncertainty Awareness.
Our system uses multi-modality (LiDAR+camera) data and learns by itself where to go (traversability) while balancing risk (uncertainty) and performance with inverse reinforcement learning. (2/5)
Our system uses multi-modality (LiDAR+camera) data and learns by itself where to go (traversability) while balancing risk (uncertainty) and performance with inverse reinforcement learning. (2/5)