



Silvio Traversaro
@traversaro.bsky.social
Robotics Applied Scientist
@ami_iit @iCub @IITalk .
Robotics Software @condaforge @RoboStack .
@ami_iit @iCub @IITalk .
Robotics Software @condaforge @RoboStack .
Reposted by Silvio Traversaro

What ROS at an Airport Apple Store?!
Pixi makes installation so easy, we can install ROS anywhere now.
#ROSCon2025 #ROSCon #ROS
Pixi makes installation so easy, we can install ROS anywhere now.
#ROSCon2025 #ROSCon #ROS
October 28, 2025 at 4:33 AM
What ROS at an Airport Apple Store?!
Pixi makes installation so easy, we can install ROS anywhere now.
#ROSCon2025 #ROSCon #ROS
Pixi makes installation so easy, we can install ROS anywhere now.
#ROSCon2025 #ROSCon #ROS
Reposted by Silvio Traversaro

Ever wondered where all my GitHub contributions come from? I have document a week's worth of @conda-forge.org contributions: uwekorn.com/2025/09/18/w...
I plan to do this for 2-3 more weeks to get an overview where I spent my time. I hope there is also content in there that helps others.
I plan to do this for 2-3 more weeks to get an overview where I spent my time. I hope there is also content in there that helps others.

2025-37: A week in conda-forge
While I spent the majority of my time on QuantCo-internal (often strategic, non-code) work, my GitHub profile still hovers around 8,000 yearly contributions. Part of this is through my internal work, ...
uwekorn.com
September 18, 2025 at 7:49 PM
Ever wondered where all my GitHub contributions come from? I have document a week's worth of @conda-forge.org contributions: uwekorn.com/2025/09/18/w...
I plan to do this for 2-3 more weeks to get an overview where I spent my time. I hope there is also content in there that helps others.
I plan to do this for 2-3 more weeks to get an overview where I spent my time. I hope there is also content in there that helps others.
Reposted by Silvio Traversaro
The FreeCAD project has pioneered the use of Conda packages to build AppImages, DMGs and Windows executables. Recently they made the switch to Pixi with great success. Read more in the guest blog post by Jackson Oursland:
prefix.dev/blog/how-fr...
prefix.dev/blog/how-fr...
How FreeCAD uses Pixi
This is a guest blog post by Jackson Oursland - a FreeCAD maintainer and esteemed member of the conda-forge and Pixi community! FreeCAD uses Conda packages to build AppImages, DMG and Windows artifacts. Pixi greatly simplifies the developer workflow.
prefix.dev
July 31, 2025 at 3:11 PM
The FreeCAD project has pioneered the use of Conda packages to build AppImages, DMGs and Windows executables. Recently they made the switch to Pixi with great success. Read more in the guest blog post by Jackson Oursland:
prefix.dev/blog/how-fr...
prefix.dev/blog/how-fr...
Reposted by Silvio Traversaro

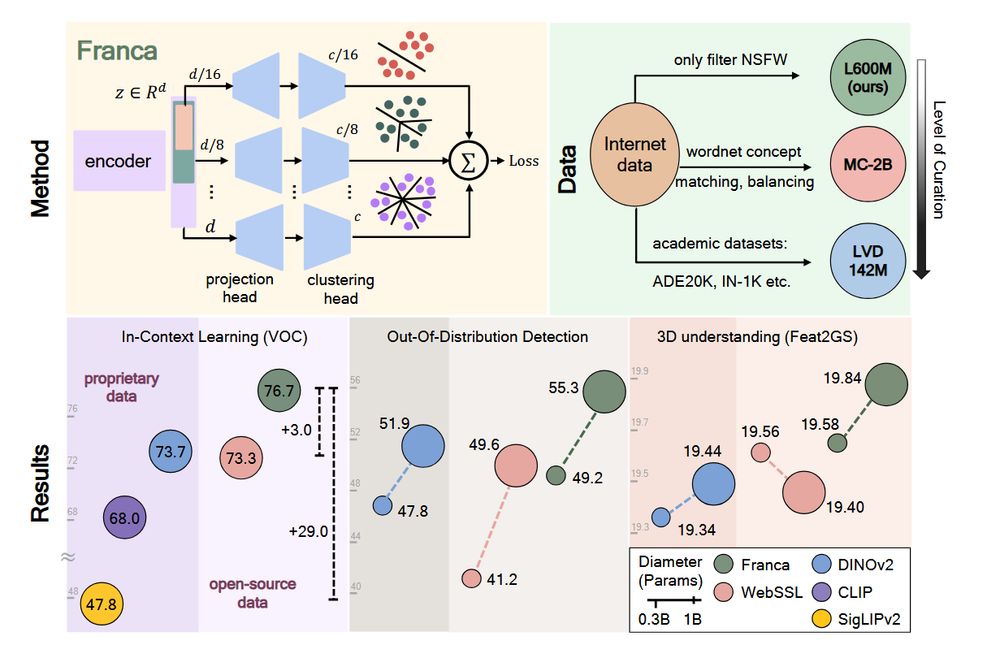
1/ Can open-data models beat DINOv2? Today we release Franca, a fully open-sourced vision foundation model. Franca with ViT-G backbone matches (and often beats) proprietary models like SigLIPv2, CLIP, DINOv2 on various benchmarks setting a new standard for open-source research.
July 21, 2025 at 2:47 PM
1/ Can open-data models beat DINOv2? Today we release Franca, a fully open-sourced vision foundation model. Franca with ViT-G backbone matches (and often beats) proprietary models like SigLIPv2, CLIP, DINOv2 on various benchmarks setting a new standard for open-source research.
Reposted by Silvio Traversaro

Frictional contact-implicit operational space control in SIMPLE, coming soon to an arxiv and git repo near you! 😃
July 18, 2025 at 4:32 PM
Frictional contact-implicit operational space control in SIMPLE, coming soon to an arxiv and git repo near you! 😃
Reposted by Silvio Traversaro
Testing out implementing inverse dynamics in our new simulator (SIMPLE)
June 6, 2025 at 2:37 PM
Testing out implementing inverse dynamics in our new simulator (SIMPLE)
Reposted by Silvio Traversaro
Amazing blog post about using Pixi for ROS 2 on Windows. We're happy about the shoutout – that's the kind of complex setup that we want to make extremely easy with Pixi.
June 4, 2025 at 3:00 PM
Amazing blog post about using Pixi for ROS 2 on Windows. We're happy about the shoutout – that's the kind of complex setup that we want to make extremely easy with Pixi.
Reposted by Silvio Traversaro

The authors of robot utility models are running live demos of their e2e policies at ICRA. This is really hard stuff to do! You rarely see e1e policy execution at events like this
May 21, 2025 at 2:02 PM
The authors of robot utility models are running live demos of their e2e policies at ICRA. This is really hard stuff to do! You rarely see e1e policy execution at events like this
Reposted by Silvio Traversaro

Today, we’re announcing the preview release of ty, an extremely fast type checker and language server for Python, written in Rust.
In early testing, it's 10x, 50x, even 100x faster than existing type checkers. (We've seen >600x speed-ups over Mypy in some real-world projects.)
In early testing, it's 10x, 50x, even 100x faster than existing type checkers. (We've seen >600x speed-ups over Mypy in some real-world projects.)
May 13, 2025 at 5:00 PM
Today, we’re announcing the preview release of ty, an extremely fast type checker and language server for Python, written in Rust.
In early testing, it's 10x, 50x, even 100x faster than existing type checkers. (We've seen >600x speed-ups over Mypy in some real-world projects.)
In early testing, it's 10x, 50x, even 100x faster than existing type checkers. (We've seen >600x speed-ups over Mypy in some real-world projects.)
Reposted by Silvio Traversaro

Today we celebrate the 10th anniversary of conda-forge!
Our beloved Github organization was created around this time on Apr 11th, 2015.
More details:
- Blog post: conda-forge.org/blog/2025/04...
- Zulip thread: conda-forge.zulipchat.com#narrow/chann...
Our beloved Github organization was created around this time on Apr 11th, 2015.
More details:
- Blog post: conda-forge.org/blog/2025/04...
- Zulip thread: conda-forge.zulipchat.com#narrow/chann...
Ten years of conda-forge! | conda-forge | community-driven packaging for conda
Today, 2025-04-11, marks the 10th anniversary of the conda-forge community.
conda-forge.org
April 11, 2025 at 7:38 AM
Today we celebrate the 10th anniversary of conda-forge!
Our beloved Github organization was created around this time on Apr 11th, 2015.
More details:
- Blog post: conda-forge.org/blog/2025/04...
- Zulip thread: conda-forge.zulipchat.com#narrow/chann...
Our beloved Github organization was created around this time on Apr 11th, 2015.
More details:
- Blog post: conda-forge.org/blog/2025/04...
- Zulip thread: conda-forge.zulipchat.com#narrow/chann...
Reposted by Silvio Traversaro

PEP 751 has been accepted! peps.python.org/pep-0751/
This means #Python now has a lock file standard that can act as an export target for tools that can create some sort of lock file. And for some tools the format can act as their primary lock file format as well instead of some proprietary format.
This means #Python now has a lock file standard that can act as an export target for tools that can create some sort of lock file. And for some tools the format can act as their primary lock file format as well instead of some proprietary format.

PEP 751 – A file format to record Python dependencies for installation reproducibility | peps.python.org
This PEP proposes a new file format for specifying dependencies to enable reproducible installation in a Python environment. The format is designed to be human-readable and machine-generated. Installe...
peps.python.org
March 31, 2025 at 9:28 PM
PEP 751 has been accepted! peps.python.org/pep-0751/
This means #Python now has a lock file standard that can act as an export target for tools that can create some sort of lock file. And for some tools the format can act as their primary lock file format as well instead of some proprietary format.
This means #Python now has a lock file standard that can act as an export target for tools that can create some sort of lock file. And for some tools the format can act as their primary lock file format as well instead of some proprietary format.
Reposted by Silvio Traversaro

I wrote a new blog post about using `conda` without any kind of shell modifications.
Just the Python entry point directly. No ~/.bashrc or Windows registry edits! Simply one more entry in PATH.
rjai.me/posts/2025-0...
Just the Python entry point directly. No ~/.bashrc or Windows registry edits! Simply one more entry in PATH.
rjai.me/posts/2025-0...
Use conda without messing with your shell profiles - rjai.me - A personal blog about scientific software, music and miscellanea
conda famously modifies shell profiles like .bashrc, or even the Windows registry, to register a series of shell functions that make it, allegedly, more accessible and user-friendly. Allegedly. After ...
rjai.me
March 19, 2025 at 10:24 PM
I wrote a new blog post about using `conda` without any kind of shell modifications.
Just the Python entry point directly. No ~/.bashrc or Windows registry edits! Simply one more entry in PATH.
rjai.me/posts/2025-0...
Just the Python entry point directly. No ~/.bashrc or Windows registry edits! Simply one more entry in PATH.
rjai.me/posts/2025-0...
Reposted by Silvio Traversaro
Software announcement: later this year, the Pinocchio rigid-body dynamics library will be switching to nanobind (from the legacy Boost.Python) for its Python bindings!
Read the announcement here: github.com/stack-of-tas...
Read the announcement here: github.com/stack-of-tas...
Annoucement - Switch to nanobind · Issue #2616 · stack-of-tasks/pinocchio
We are in the process of switching from Boost.Python to nanobind in Pinocchio. The overall objective is, among other objectives, to: reduce the size of Python modules with similar or improved perfo...
github.com
March 13, 2025 at 12:22 PM
Software announcement: later this year, the Pinocchio rigid-body dynamics library will be switching to nanobind (from the legacy Boost.Python) for its Python bindings!
Read the announcement here: github.com/stack-of-tas...
Read the announcement here: github.com/stack-of-tas...
Reposted by Silvio Traversaro

Real-time processing of sensor streams is crucial for robotics and AR. We introduce Troy-Vis, a real-time, open-vocabulary video instance segmentation method which will be presented in an oral presentation at WACV tomorrow.
Paper: arxiv.org/abs/2412.04434
Code: github.com/google-resea...
Paper: arxiv.org/abs/2412.04434
Code: github.com/google-resea...
GitHub - google-research/troyvis
Contribute to google-research/troyvis development by creating an account on GitHub.
github.com
March 2, 2025 at 8:48 PM
Real-time processing of sensor streams is crucial for robotics and AR. We introduce Troy-Vis, a real-time, open-vocabulary video instance segmentation method which will be presented in an oral presentation at WACV tomorrow.
Paper: arxiv.org/abs/2412.04434
Code: github.com/google-resea...
Paper: arxiv.org/abs/2412.04434
Code: github.com/google-resea...
Reposted by Silvio Traversaro
🚀 Great news for Windows users! The latest version of PyTorch is back! 🥳
🙏 Huge thanks to the @condaforge community for fixing the builds.
🧑💻 Installing PyTorch just got a whole lot easier!
pixi.sh/latest/feat...
🙏 Huge thanks to the @condaforge community for fixing the builds.
🧑💻 Installing PyTorch just got a whole lot easier!
pixi.sh/latest/feat...

Pytorch Installation - Pixi by prefix.dev
None
prefix-dev.github.io
January 20, 2025 at 10:03 AM
🚀 Great news for Windows users! The latest version of PyTorch is back! 🥳
🙏 Huge thanks to the @condaforge community for fixing the builds.
🧑💻 Installing PyTorch just got a whole lot easier!
pixi.sh/latest/feat...
🙏 Huge thanks to the @condaforge community for fixing the builds.
🧑💻 Installing PyTorch just got a whole lot easier!
pixi.sh/latest/feat...
Reposted by Silvio Traversaro

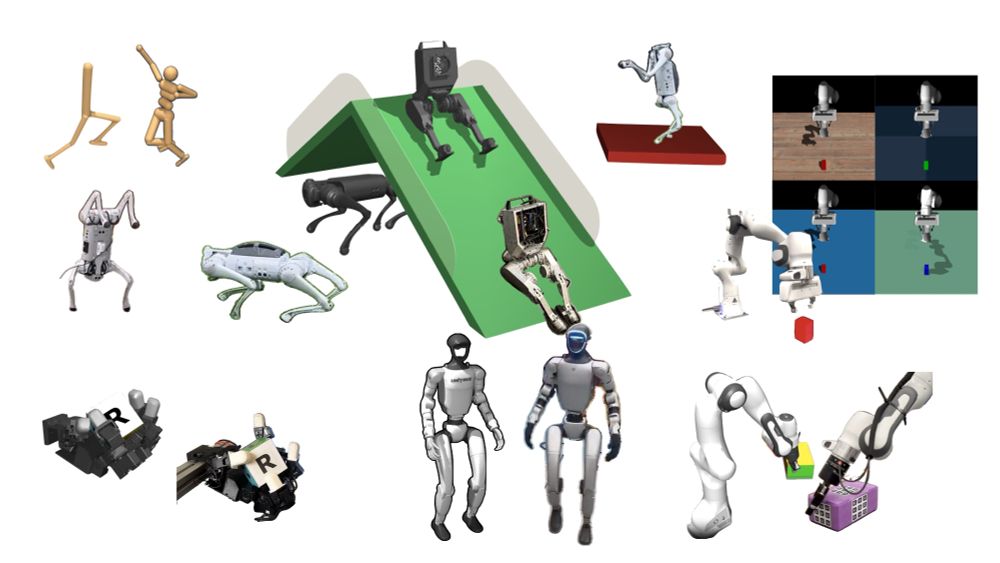
Introducing playground.mujoco.org
Combining MuJoCo’s rich and thriving ecosystem, massively parallel GPU-accelerated simulation, and real-world results across a diverse range of robot platforms: quadrupeds, humanoids, dexterous hands, and arms.
Get started today: pip install playground
Combining MuJoCo’s rich and thriving ecosystem, massively parallel GPU-accelerated simulation, and real-world results across a diverse range of robot platforms: quadrupeds, humanoids, dexterous hands, and arms.
Get started today: pip install playground
MuJoCo Playground
An open-source framework for GPU-accelerated robot learning and sim-to-real transfer
playground.mujoco.org
January 16, 2025 at 8:48 PM
Introducing playground.mujoco.org
Combining MuJoCo’s rich and thriving ecosystem, massively parallel GPU-accelerated simulation, and real-world results across a diverse range of robot platforms: quadrupeds, humanoids, dexterous hands, and arms.
Get started today: pip install playground
Combining MuJoCo’s rich and thriving ecosystem, massively parallel GPU-accelerated simulation, and real-world results across a diverse range of robot platforms: quadrupeds, humanoids, dexterous hands, and arms.
Get started today: pip install playground
Reposted by Silvio Traversaro

Install a GPU enabled PyTorch on your machine (with all CUDA dependencies if on Linux) from @conda-forge.org in two commands with @prefix.dev's pixi: github.com/matthewfeick...
January 3, 2025 at 6:42 PM
Install a GPU enabled PyTorch on your machine (with all CUDA dependencies if on Linux) from @conda-forge.org in two commands with @prefix.dev's pixi: github.com/matthewfeick...
Reposted by Silvio Traversaro
Robot end-to-end learning gets better when including force medium.com/correll-l...
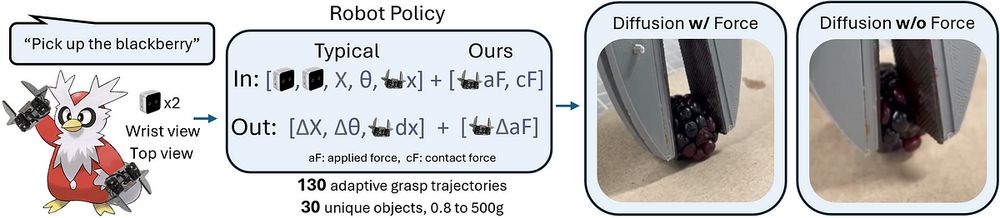
Integrating Contact Force for Delicate Robot Grasping
Improving end-to-end learning with salient information
medium.com
January 2, 2025 at 11:00 PM
Robot end-to-end learning gets better when including force medium.com/correll-l...
Reposted by Silvio Traversaro

Remember: it is a calmer more chill life without copyright years. https://daniel.haxx.se/blog/2023/01/08/copyright-without-years/
Copyright without years
<p>Like so many other software projects the curl project has copyright mentions at the top of almost every file in the source code repository. Like</p>
<pre class="wp-block-preformatted">Copyright (C) 1998 - 2022, Daniel Stenberg ...</pre>
<p>Over the years we have used a combination of scripts and manual edits to update the ending year in that copyright line to match the year of the latest update of that file.</p>
<p>As soon as we started a new year and someone updated a file, the copyright range needed update. Scripts and tools made it less uncomfortable, but it was always somewhat of a pain to remember and fix.</p>
<h2 class="wp-block-heading">In 2023 this changed</h2>
<p>When the year was again bumped and the first changes of the year were done to curl, we should then consequentially start updating years again to make ranges end with 2023.</p>
<p>Only this time someone asked me <em>why?</em> and it made me decide that <em>what the heck, let’s completely rip them out instead!</em> Doing it at the beginning of the year is also a very good moment.</p>
<h2 class="wp-block-heading">Do we need the years?</h2>
<p>The <a href="https://en.wikipedia.org/wiki/Berne_Convention">Berne Convention</a> states that copyright “must be automatic; it is prohibited to require formal registration”.</p>
<p>The often-used copyright lines are not necessary to protect our rights. According to the Wikipedia page mentioned above, the Berne Convention has been ratified by 181 states out of 195 countries in the world.</p>
<p>They can still serve a purpose as they are informational and make the ownership question quite clear. The year ranges add questionable value though.</p>
<p>I have tried to find resources that argue <strong>for</strong> the importance of the copyright years to be stated and present, but I have not found any credible sources. Possibly because I haven’t figured out where to look.</p>
<h2 class="wp-block-heading">Not alone</h2>
<p>It turns out quite a few projects run by many different organizations or even huge companies have already dropped the years from their source code header copyright statements. Presumably at least some of those giant corporations have had their legal departments give a green light to the idea before they went ahead and published source code that way to the world.</p>
<h2 class="wp-block-heading">Low risk</h2>
<p>We own the copyrights no matter if the years are stated or not. The exact years the files were created or edited can still easily be figured out since we use version control, should anyone ever actually care about it. And we give away curl for free, under an extremely liberal license.</p>
<p>I don’t think we risk much by doing this move.</p>
<h2 class="wp-block-heading">January 3, 2023</h2>
<p>On this day I merged commit <a href="https://github.com/curl/curl/commit/2bc1d775f510196154283374284f98d3eae03544">2bc1d775f510</a>, which updated 1856 files and removed copyright years from almost everywhere in the source code repository.</p>
<p>I decided to leave them in the <a href="https://github.com/curl/curl/blob/master/COPYING">main license file</a>. Partly because this is a file that lots of companies include in their products and I have had some use of seeing the year ranges in there in the past!</p>
<h2 class="wp-block-heading">Bliss</h2>
<p>Now we can forget about copyright years in the project. It’s a relief!</p>
daniel.haxx.se
January 1, 2025 at 9:45 AM
Remember: it is a calmer more chill life without copyright years. https://daniel.haxx.se/blog/2023/01/08/copyright-without-years/
Reposted by Silvio Traversaro

It's basically like Mujoco but with more advanced materials/rendering/solvers, written all in Python thanks to being powered by Taichi, which makes it much more accessible.
I like it a lot. It's very accessible.
They went too far with marketing, but willing to ignore it for now.
I like it a lot. It's very accessible.
They went too far with marketing, but willing to ignore it for now.
December 20, 2024 at 9:03 PM
It's basically like Mujoco but with more advanced materials/rendering/solvers, written all in Python thanks to being powered by Taichi, which makes it much more accessible.
I like it a lot. It's very accessible.
They went too far with marketing, but willing to ignore it for now.
I like it a lot. It's very accessible.
They went too far with marketing, but willing to ignore it for now.
Reposted by Silvio Traversaro

2024 was a busy one! We released v 1.0 of the Open Source AI Definition, among many other accomplishments across 3 grand areas: licensing and legal, policy and standards, and research and outreach: https://opensource.org/2024-annual-report

2024 Annual Report
Website Membership Newsletter 🌎+3M visitors / year(~50% YoY) ❤️~5000 members(~80% YoY) ✉️~15000 subscribers(~50% YoY) Blog posts Events Talks Townhalls 📝100+ 🎟️25+ 🎤20+ 💻20+ The OSI published over 100 blog posts…
opensource.org
December 20, 2024 at 10:59 AM
2024 was a busy one! We released v 1.0 of the Open Source AI Definition, among many other accomplishments across 3 grand areas: licensing and legal, policy and standards, and research and outreach: https://opensource.org/2024-annual-report
Reposted by Silvio Traversaro

🎉 Our new work tackling long horizon low-level manipulation in apartments is out! ~500GB of demonstration data in sim (you can generate more) and RL/IL baselines all provided. ManiSkill helped make this project scalable and faster to run via GPU sim compared to alternatives
📢 Introducing ManiSkill-HAB: A benchmark for low-level manipulation in home rearrangement tasks!
- GPU-accelerated simulation
- Extensive RL/IL baselines
- Vision-based, whole-body control robot dataset
All open-sourced: arth-shukla.github.io/mshab
🧵(1/5)
- GPU-accelerated simulation
- Extensive RL/IL baselines
- Vision-based, whole-body control robot dataset
All open-sourced: arth-shukla.github.io/mshab
🧵(1/5)
December 19, 2024 at 11:05 PM
🎉 Our new work tackling long horizon low-level manipulation in apartments is out! ~500GB of demonstration data in sim (you can generate more) and RL/IL baselines all provided. ManiSkill helped make this project scalable and faster to run via GPU sim compared to alternatives
Reposted by Silvio Traversaro

📢 Introducing ManiSkill-HAB: A benchmark for low-level manipulation in home rearrangement tasks!
- GPU-accelerated simulation
- Extensive RL/IL baselines
- Vision-based, whole-body control robot dataset
All open-sourced: arth-shukla.github.io/mshab
🧵(1/5)
- GPU-accelerated simulation
- Extensive RL/IL baselines
- Vision-based, whole-body control robot dataset
All open-sourced: arth-shukla.github.io/mshab
🧵(1/5)
December 19, 2024 at 10:45 PM
📢 Introducing ManiSkill-HAB: A benchmark for low-level manipulation in home rearrangement tasks!
- GPU-accelerated simulation
- Extensive RL/IL baselines
- Vision-based, whole-body control robot dataset
All open-sourced: arth-shukla.github.io/mshab
🧵(1/5)
- GPU-accelerated simulation
- Extensive RL/IL baselines
- Vision-based, whole-body control robot dataset
All open-sourced: arth-shukla.github.io/mshab
🧵(1/5)
Reposted by Silvio Traversaro
unfortunately not yet. It is only fast for simple scenes but for more realistic scenarios (robust locomotion, manipulation) it seems to be slower (rendering or state only simulation) than NVIDIA isaac lab and my labs simulator maniskill. Sharing a report next week with accurate benchmark numbers
December 19, 2024 at 1:12 PM
unfortunately not yet. It is only fast for simple scenes but for more realistic scenarios (robust locomotion, manipulation) it seems to be slower (rendering or state only simulation) than NVIDIA isaac lab and my labs simulator maniskill. Sharing a report next week with accurate benchmark numbers
Reposted by Silvio Traversaro

popular computer vision package ultralytics (home of yolov8 and yolo11) was compromised.
a crypto miner was injected into versions 8.3.41 and 8.3.42.
link: github.com/ultralytics/...
a crypto miner was injected into versions 8.3.41 and 8.3.42.
link: github.com/ultralytics/...
December 5, 2024 at 9:21 PM
popular computer vision package ultralytics (home of yolov8 and yolo11) was compromised.
a crypto miner was injected into versions 8.3.41 and 8.3.42.
link: github.com/ultralytics/...
a crypto miner was injected into versions 8.3.41 and 8.3.42.
link: github.com/ultralytics/...