



Kacper Wyrwal
@wyrwalkacper.bsky.social
I dabble in geometric machine learning.
Master's student at the University of Oxford.
Master's student at the University of Oxford.
All this is with little to no fine-tuning! Simply initialising hidden layers with a small variance allows our model to use additional layers just when necessary, preventing overfitting in our experiments.
See our paper here: arxiv.org/abs/2411.00161. 9/n
See our paper here: arxiv.org/abs/2411.00161. 9/n
February 13, 2025 at 4:45 PM
All this is with little to no fine-tuning! Simply initialising hidden layers with a small variance allows our model to use additional layers just when necessary, preventing overfitting in our experiments.
See our paper here: arxiv.org/abs/2411.00161. 9/n
See our paper here: arxiv.org/abs/2411.00161. 9/n
Lastly, we demonstrate that residual deep GPs can be faster than Euclidean deep GPs, by projecting Euclidean data to a compact manifold. 8/n
February 13, 2025 at 4:45 PM
Lastly, we demonstrate that residual deep GPs can be faster than Euclidean deep GPs, by projecting Euclidean data to a compact manifold. 8/n
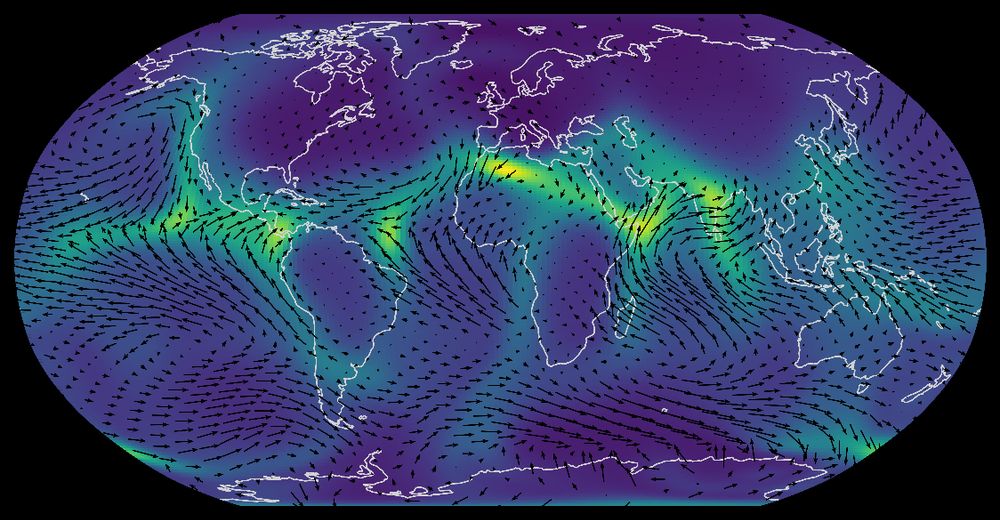
We test our model on the ERA5 dataset – interpolating wind on the globe from a set of points on a satellite trajectory. Our model outperforms baselines, yielding accurate and interpretable uncertainty estimates. An example predictive mean and variance is shown below. 7/n
February 13, 2025 at 4:45 PM
We test our model on the ERA5 dataset – interpolating wind on the globe from a set of points on a satellite trajectory. Our model outperforms baselines, yielding accurate and interpretable uncertainty estimates. An example predictive mean and variance is shown below. 7/n
Our model can also serve as a plug-and-play replacement for shallow manifold GPs in geometry-aware Bayesian optimisation. This can be especially useful for complex target functions, as we demonstrate experimentally. 6/n
February 13, 2025 at 4:45 PM
Our model can also serve as a plug-and-play replacement for shallow manifold GPs in geometry-aware Bayesian optimisation. This can be especially useful for complex target functions, as we demonstrate experimentally. 6/n
With manifold GPs at every layer, we can leverage manifold-specific methods like intrinsic Gaussian vector fields and interdomain inducing variables to improve performance. 5/n
February 13, 2025 at 4:45 PM
With manifold GPs at every layer, we can leverage manifold-specific methods like intrinsic Gaussian vector fields and interdomain inducing variables to improve performance. 5/n
We can build deep GPs by stacking these layers. Each layer learns a translation of inputs, allowing incremental updates of hidden representations – just like the ResNet! In fact, on the Euclidean manifold, we recover the ResNet-inspired deep GP of Salimbeni & @deisenroth.bsky.social. 4/n
February 13, 2025 at 4:45 PM
We can build deep GPs by stacking these layers. Each layer learns a translation of inputs, allowing incremental updates of hidden representations – just like the ResNet! In fact, on the Euclidean manifold, we recover the ResNet-inspired deep GP of Salimbeni & @deisenroth.bsky.social. 4/n
Not quite. On general manifolds, points and tangent vectors cannot be identified. We can, however, translate points in the direction of vectors using the exponential map. Thus, we define a manifold-to-manifold GP as a composition of a Gaussian vector field with this map. 3/n
February 13, 2025 at 4:45 PM
Not quite. On general manifolds, points and tangent vectors cannot be identified. We can, however, translate points in the direction of vectors using the exponential map. Thus, we define a manifold-to-manifold GP as a composition of a Gaussian vector field with this map. 3/n
When Euclidean GPs struggle to model irregular functions, stacking them into a deep GPs can help. This works because points and vectors in Euclidean space can be identified, allowing a vector-valued GP’s output to serve as another’s input. But can we do this on manifolds? 2/n
February 13, 2025 at 4:45 PM
When Euclidean GPs struggle to model irregular functions, stacking them into a deep GPs can help. This works because points and vectors in Euclidean space can be identified, allowing a vector-valued GP’s output to serve as another’s input. But can we do this on manifolds? 2/n