



@wolfram-burgard.bsky.social
Reposted

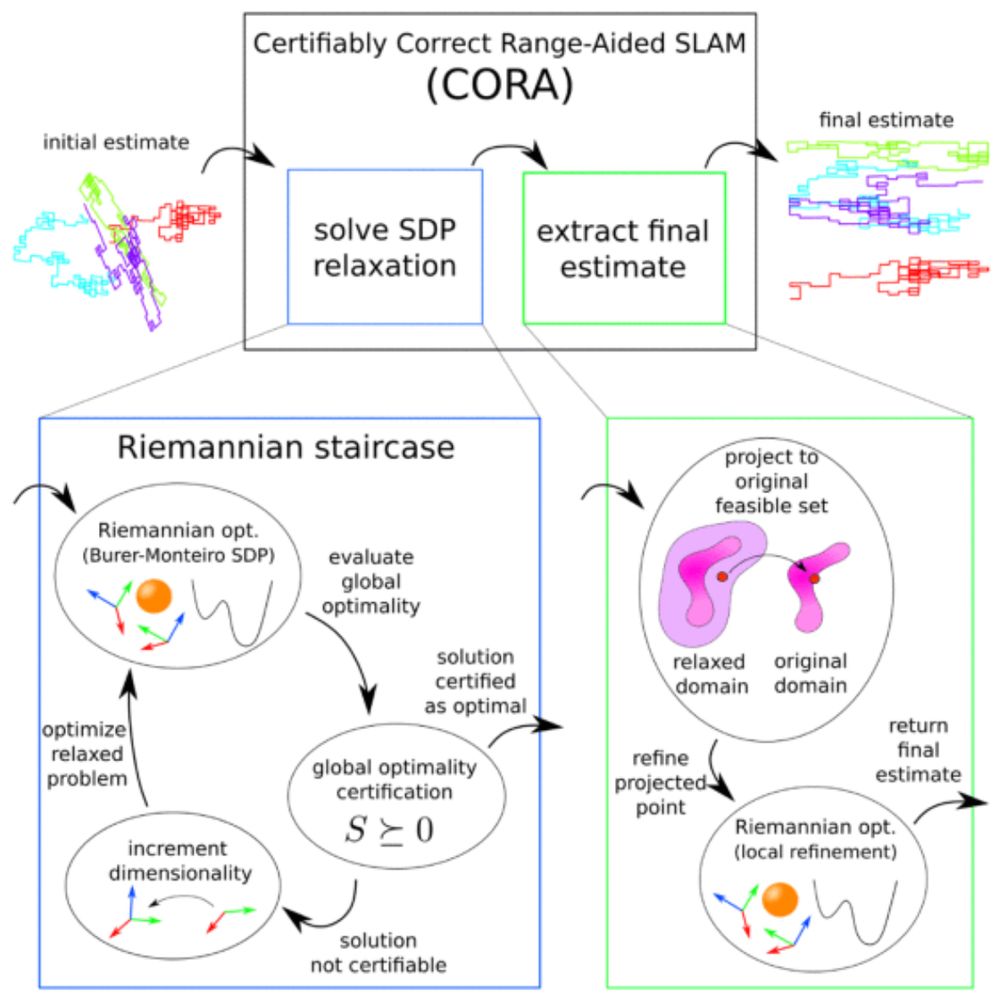
And the winner of the 2024 #TRO King-Sun Fu Award is the paper entitled “Certifiably Correct Range-Aided SLAM” which presents CORA, an algorithm achieving certifiably optimal solutions for range-aided SLAM problems, enhancing mapping accuracy and robustness.
ieeexplore.ieee.org/document/106...
ieeexplore.ieee.org/document/106...
May 27, 2025 at 1:36 PM
And the winner of the 2024 #TRO King-Sun Fu Award is the paper entitled “Certifiably Correct Range-Aided SLAM” which presents CORA, an algorithm achieving certifiably optimal solutions for range-aided SLAM problems, enhancing mapping accuracy and robustness.
ieeexplore.ieee.org/document/106...
ieeexplore.ieee.org/document/106...
Reposted
T-RO is proud to announce the upcoming special collection, Foundation Models for Robotics. Submission window opens September 1.
#RobotEmbodiments #FoundationModels #RoboticsFoundationModels #RoboticVLM #RoboticsLLM #IEEERAS
#RobotEmbodiments #FoundationModels #RoboticsFoundationModels #RoboticVLM #RoboticsLLM #IEEERAS
July 10, 2025 at 8:55 PM
T-RO is proud to announce the upcoming special collection, Foundation Models for Robotics. Submission window opens September 1.
#RobotEmbodiments #FoundationModels #RoboticsFoundationModels #RoboticVLM #RoboticsLLM #IEEERAS
#RobotEmbodiments #FoundationModels #RoboticsFoundationModels #RoboticVLM #RoboticsLLM #IEEERAS
Reposted
The challenges of mapping dynamic environments. Particle-based instance-aware semantic occupancy map jointly estimates occupancy, semantics, and instance IDs to improve robustness and accuracy.
ieeexplore.ieee.org/document/108...
#RobotSensingSystems
ieeexplore.ieee.org/document/108...
#RobotSensingSystems
![World model illustration. (a) Example scenario with both objects of interests and background objects. The wall and ground belong to the background object with ID 1. The tree belongs to the background object with ID 2. The car and the two robots belong to the objects of interest with ID 3, 4 and 6, respectively, and are dynamic objects. The mailbox with ID 5 is an example static object of interests. Each object is assumed to be composed of a set of points on its surface. The set of the Ith object is marked as XI and the points within the set share the same color. (b) Particles (hollow points) that are used to model the PHD of the points. Particles with different IDs are shown in different colors. Particles with the same ID share the same motion. The particles are stored in voxel subspaces [15], which are also used for resampling and occupancy estimation. (c) Camera pinhole model used in this work to formulate the pyramid subspaces [15], which are used to distinguish the observed area and occluded area in the continuous space and to accelerate the update process. The green point is a measurement point in a pyramid subspace. The gray area behind the measurement point is occluded. Only a part of the points in X1 in (a), voxel subspaces in (b), and pyramid subspaces in (c) are shown for clear illustration.](https://cdn.bsky.app/img/feed_thumbnail/plain/did:plc:ttw5tcvxt52gbygtxrgvschk/bafkreia3k2stgv6ewad27uehveauubspl56e2olabf4yme2h57vdxtbaiu@jpeg)
April 11, 2025 at 9:17 PM
The challenges of mapping dynamic environments. Particle-based instance-aware semantic occupancy map jointly estimates occupancy, semantics, and instance IDs to improve robustness and accuracy.
ieeexplore.ieee.org/document/108...
#RobotSensingSystems
ieeexplore.ieee.org/document/108...
#RobotSensingSystems
Reposted
Sadly, T-RO has recently lost a founding father with the passing of George Bekey renowned American roboticist, an original member of @ieeeras.bsky.social and founding editor-in-chief of IEEE Transactions on Robotics (T-RO).
ieeexplore.ieee.org/document/108...
ieeexplore.ieee.org/document/108...

March 12, 2025 at 3:07 PM
Sadly, T-RO has recently lost a founding father with the passing of George Bekey renowned American roboticist, an original member of @ieeeras.bsky.social and founding editor-in-chief of IEEE Transactions on Robotics (T-RO).
ieeexplore.ieee.org/document/108...
ieeexplore.ieee.org/document/108...