



@takerumiyato.bsky.social
Reposted

🚀 Introducing our new paper, MDPO: Overcoming the Training-Inference Divide of Masked Diffusion Language Models.
📄 Paper: www.scholar-inbox.com/papers/He202...
arxiv.org/pdf/2508.13148
💻 Code: github.com/autonomousvi...
🌐 Project Page: cli212.github.io/MDPO/
📄 Paper: www.scholar-inbox.com/papers/He202...
arxiv.org/pdf/2508.13148
💻 Code: github.com/autonomousvi...
🌐 Project Page: cli212.github.io/MDPO/
August 20, 2025 at 9:30 AM
🚀 Introducing our new paper, MDPO: Overcoming the Training-Inference Divide of Masked Diffusion Language Models.
📄 Paper: www.scholar-inbox.com/papers/He202...
arxiv.org/pdf/2508.13148
💻 Code: github.com/autonomousvi...
🌐 Project Page: cli212.github.io/MDPO/
📄 Paper: www.scholar-inbox.com/papers/He202...
arxiv.org/pdf/2508.13148
💻 Code: github.com/autonomousvi...
🌐 Project Page: cli212.github.io/MDPO/
Reposted

📢 New paper CVPR 25!
Can meshes capture fuzzy geometry? Volumetric Surfaces uses adaptive textured shells to model hair, fur without the splatting / volume overhead. It’s fast, looks great, and runs in real time even on budget phones.
🔗 autonomousvision.github.io/volsurfs/
📄 arxiv.org/pdf/2409.02482
Can meshes capture fuzzy geometry? Volumetric Surfaces uses adaptive textured shells to model hair, fur without the splatting / volume overhead. It’s fast, looks great, and runs in real time even on budget phones.
🔗 autonomousvision.github.io/volsurfs/
📄 arxiv.org/pdf/2409.02482
May 5, 2025 at 1:00 PM
📢 New paper CVPR 25!
Can meshes capture fuzzy geometry? Volumetric Surfaces uses adaptive textured shells to model hair, fur without the splatting / volume overhead. It’s fast, looks great, and runs in real time even on budget phones.
🔗 autonomousvision.github.io/volsurfs/
📄 arxiv.org/pdf/2409.02482
Can meshes capture fuzzy geometry? Volumetric Surfaces uses adaptive textured shells to model hair, fur without the splatting / volume overhead. It’s fast, looks great, and runs in real time even on budget phones.
🔗 autonomousvision.github.io/volsurfs/
📄 arxiv.org/pdf/2409.02482
Reposted

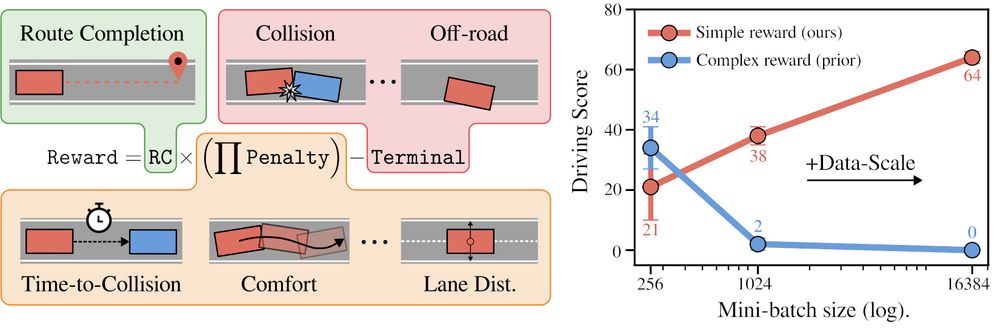
Introducing CaRL: Learning Scalable Planning Policies with Simple Rewards
We show how simple rewards enable scaling up PPO for planning.
CaRL outperforms all prior learning-based approaches on nuPlan Val14 and CARLA longest6 v2, using less inference compute.
arxiv.org/abs/2504.17838
We show how simple rewards enable scaling up PPO for planning.
CaRL outperforms all prior learning-based approaches on nuPlan Val14 and CARLA longest6 v2, using less inference compute.
arxiv.org/abs/2504.17838
April 28, 2025 at 3:17 PM
Introducing CaRL: Learning Scalable Planning Policies with Simple Rewards
We show how simple rewards enable scaling up PPO for planning.
CaRL outperforms all prior learning-based approaches on nuPlan Val14 and CARLA longest6 v2, using less inference compute.
arxiv.org/abs/2504.17838
We show how simple rewards enable scaling up PPO for planning.
CaRL outperforms all prior learning-based approaches on nuPlan Val14 and CARLA longest6 v2, using less inference compute.
arxiv.org/abs/2504.17838
Reposted

Synchronization is ubiquitous in nature and a key mechanism for information processing in the brain. We introduce AKOrN as a dynamical alternative to threshold units, which can be combined with MLPs, CNNs or Transformers. ICLR'25 Oral. Project page: takerum.github.io/akorn_projec...
February 12, 2025 at 2:07 PM
Synchronization is ubiquitous in nature and a key mechanism for information processing in the brain. We introduce AKOrN as a dynamical alternative to threshold units, which can be combined with MLPs, CNNs or Transformers. ICLR'25 Oral. Project page: takerum.github.io/akorn_projec...