




Sayan Deb Sarkar
@sayandsarkar.bsky.social
PhD in 3D Vision @Stanford | MSc CS @ETH | Ex @Qualcomm, @MercedesBenz
W: sayands.github.io
W: sayands.github.io
✨ Excited to head off to Nashville for #CVPR2025
🎤 Catch me at the poster sessions or just come say hi to grab ☕
🗓️ Friday 13 June 4:00 p.m. - 6:00 p.m. CDT
📍 Poster Session #2 — Exhibit Hall D Highlight Poster #346
(1/3)
🎤 Catch me at the poster sessions or just come say hi to grab ☕
🗓️ Friday 13 June 4:00 p.m. - 6:00 p.m. CDT
📍 Poster Session #2 — Exhibit Hall D Highlight Poster #346
(1/3)
🎉 Excited to share our latest work, CrossOver: 3D Scene Cross-Modal Alignment, accepted to #CVPR2025 🌐✨
We learn a unified, modality-agnostic embedding space, enabling seamless scene-level alignment across multiple modalities — no semantic annotations needed!🚀
We learn a unified, modality-agnostic embedding space, enabling seamless scene-level alignment across multiple modalities — no semantic annotations needed!🚀
June 10, 2025 at 7:52 PM
✨ Excited to head off to Nashville for #CVPR2025
🎤 Catch me at the poster sessions or just come say hi to grab ☕
🗓️ Friday 13 June 4:00 p.m. - 6:00 p.m. CDT
📍 Poster Session #2 — Exhibit Hall D Highlight Poster #346
(1/3)
🎤 Catch me at the poster sessions or just come say hi to grab ☕
🗓️ Friday 13 June 4:00 p.m. - 6:00 p.m. CDT
📍 Poster Session #2 — Exhibit Hall D Highlight Poster #346
(1/3)
Reposted by Sayan Deb Sarkar

🥳Excited to share our latest work, WildGS-SLAM: Monocular Gaussian Splatting SLAM in Dynamic Environments, accepted to #CVPR2025 🌐
We present a robust monocular RGB SLAM system that uses uncertainty-aware tracking and mapping to handle dynamic scenes.
We present a robust monocular RGB SLAM system that uses uncertainty-aware tracking and mapping to handle dynamic scenes.
April 10, 2025 at 2:58 PM
🥳Excited to share our latest work, WildGS-SLAM: Monocular Gaussian Splatting SLAM in Dynamic Environments, accepted to #CVPR2025 🌐
We present a robust monocular RGB SLAM system that uses uncertainty-aware tracking and mapping to handle dynamic scenes.
We present a robust monocular RGB SLAM system that uses uncertainty-aware tracking and mapping to handle dynamic scenes.
🏆 CrossOver is accepted as a 𝗛𝗶𝗴𝗵𝗹𝗶𝗴𝗵𝘁 at #CVPR2025! ✨
💻 Fully open-sourced code with all pre-trained checkpoints: github.com/GradientSpac...
📡 Stay tuned for a deep-dive thread and what else we are cooking 🍳
💻 Fully open-sourced code with all pre-trained checkpoints: github.com/GradientSpac...
📡 Stay tuned for a deep-dive thread and what else we are cooking 🍳
🎉 Excited to share our latest work, CrossOver: 3D Scene Cross-Modal Alignment, accepted to #CVPR2025 🌐✨
We learn a unified, modality-agnostic embedding space, enabling seamless scene-level alignment across multiple modalities — no semantic annotations needed!🚀
We learn a unified, modality-agnostic embedding space, enabling seamless scene-level alignment across multiple modalities — no semantic annotations needed!🚀
April 7, 2025 at 10:20 PM
🏆 CrossOver is accepted as a 𝗛𝗶𝗴𝗵𝗹𝗶𝗴𝗵𝘁 at #CVPR2025! ✨
💻 Fully open-sourced code with all pre-trained checkpoints: github.com/GradientSpac...
📡 Stay tuned for a deep-dive thread and what else we are cooking 🍳
💻 Fully open-sourced code with all pre-trained checkpoints: github.com/GradientSpac...
📡 Stay tuned for a deep-dive thread and what else we are cooking 🍳
🎉 Excited to share our latest work, CrossOver: 3D Scene Cross-Modal Alignment, accepted to #CVPR2025 🌐✨
We learn a unified, modality-agnostic embedding space, enabling seamless scene-level alignment across multiple modalities — no semantic annotations needed!🚀
We learn a unified, modality-agnostic embedding space, enabling seamless scene-level alignment across multiple modalities — no semantic annotations needed!🚀
February 26, 2025 at 10:02 PM
🎉 Excited to share our latest work, CrossOver: 3D Scene Cross-Modal Alignment, accepted to #CVPR2025 🌐✨
We learn a unified, modality-agnostic embedding space, enabling seamless scene-level alignment across multiple modalities — no semantic annotations needed!🚀
We learn a unified, modality-agnostic embedding space, enabling seamless scene-level alignment across multiple modalities — no semantic annotations needed!🚀
Reposted by Sayan Deb Sarkar

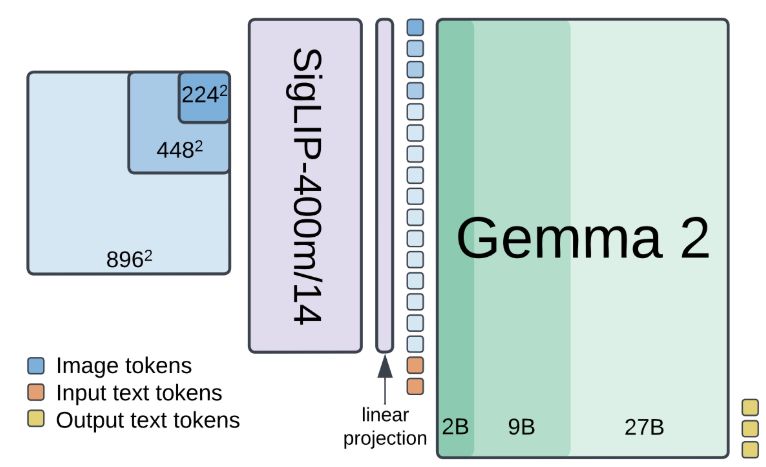
🚀🚀PaliGemma 2 is our updated and improved PaliGemma release using the Gemma 2 models and providing new pre-trained checkpoints for the full cross product of {224px,448px,896px} resolutions and {3B,10B,28B} model sizes.
1/7
1/7
December 5, 2024 at 6:16 PM
🚀🚀PaliGemma 2 is our updated and improved PaliGemma release using the Gemma 2 models and providing new pre-trained checkpoints for the full cross product of {224px,448px,896px} resolutions and {3B,10B,28B} model sizes.
1/7
1/7