



Patricia Gschoßmann
@pgschossmann.bsky.social
PhD student @ Uni Tübingen and IMPRS-IS, working on 3D vision
patriciagschossmann.github.io
patriciagschossmann.github.io
Reposted by Patricia Gschoßmann

So excited that our Scholar Inbox is serving ACL 2025. Looking forward to meeting all of you in Vienna, along with my great team @andreasgeiger.bsky.social @haoyuhe.bsky.social @markusflicke.bsky.social! We also present our ACL Demo paper poster at (Hall X4 X5) 28th 11:00-12:30. Welcome for chat!
We are excited that Scholar Inbox is supporting ACL 2025
@aclmeeting.bsky.social with personalized conference programs this year for the first time!
www.scholar-inbox.com/conference/a...
It would be great if you could widely share this news within the NLP community. See you next week in Vienna!
@aclmeeting.bsky.social with personalized conference programs this year for the first time!
www.scholar-inbox.com/conference/a...
It would be great if you could widely share this news within the NLP community. See you next week in Vienna!

July 25, 2025 at 1:04 PM
So excited that our Scholar Inbox is serving ACL 2025. Looking forward to meeting all of you in Vienna, along with my great team @andreasgeiger.bsky.social @haoyuhe.bsky.social @markusflicke.bsky.social! We also present our ACL Demo paper poster at (Hall X4 X5) 28th 11:00-12:30. Welcome for chat!
Reposted by Patricia Gschoßmann

In case you find it as relaxing as we do: Here is a 2h+ video of our autonomous RL driving agent CaRL in action! @danieldauner.bsky.social @bernhard-jaeger.bsky.social @kashyap7x.bsky.social
youtube.com/watch?v=_god...
youtube.com/watch?v=_god...

CaRL: Learning Scalable Planning Policies with Simple Rewards
YouTube video by Daniel Dauner
youtube.com
July 15, 2025 at 6:17 AM
In case you find it as relaxing as we do: Here is a 2h+ video of our autonomous RL driving agent CaRL in action! @danieldauner.bsky.social @bernhard-jaeger.bsky.social @kashyap7x.bsky.social
youtube.com/watch?v=_god...
youtube.com/watch?v=_god...
Reposted by Patricia Gschoßmann

We have released the code for our work, CaRL: Learning Scalable Planning Policies with Simple Rewards.
The repository contains the first public code base for training RL agents with the CARLA leaderboard 2.0 and nuPlan.
github.com/autonomousvi...
The repository contains the first public code base for training RL agents with the CARLA leaderboard 2.0 and nuPlan.
github.com/autonomousvi...
GitHub - autonomousvision/CaRL: [ArXiv 2025] CaRL: Learning Scalable Planning Policies with Simple Rewards
[ArXiv 2025] CaRL: Learning Scalable Planning Policies with Simple Rewards - autonomousvision/CaRL
github.com
July 15, 2025 at 4:05 PM
We have released the code for our work, CaRL: Learning Scalable Planning Policies with Simple Rewards.
The repository contains the first public code base for training RL agents with the CARLA leaderboard 2.0 and nuPlan.
github.com/autonomousvi...
The repository contains the first public code base for training RL agents with the CARLA leaderboard 2.0 and nuPlan.
github.com/autonomousvi...
Reposted by Patricia Gschoßmann

Yesterday, the founding team behind scholar-inbox.com took home the Audience Award 🏆 and the Best Business Model Award 🏆!
Philipp Hühn and @markusflicke.bsky.social impressed everyone with a clear and engaging pitch of their smart recommender tool for academic papers.
Philipp Hühn and @markusflicke.bsky.social impressed everyone with a clear and engaging pitch of their smart recommender tool for academic papers.

July 11, 2025 at 2:48 PM
Yesterday, the founding team behind scholar-inbox.com took home the Audience Award 🏆 and the Best Business Model Award 🏆!
Philipp Hühn and @markusflicke.bsky.social impressed everyone with a clear and engaging pitch of their smart recommender tool for academic papers.
Philipp Hühn and @markusflicke.bsky.social impressed everyone with a clear and engaging pitch of their smart recommender tool for academic papers.
Reposted by Patricia Gschoßmann
Last day of our AVG Summer retreat 2025 in Balderschwang! Many talks and for the first time 2 panel discussions and a PhD life hack session. And of course some sports,games,swimming and lots of fun..




July 2, 2025 at 9:20 AM
Last day of our AVG Summer retreat 2025 in Balderschwang! Many talks and for the first time 2 panel discussions and a PhD life hack session. And of course some sports,games,swimming and lots of fun..
Reposted by Patricia Gschoßmann
Christina's new work PrITTI generates high-quality, controllable 3D semantic urban scenes in a compact primitive-based representation using a latent diffusion model. This enables applications like scene editing, inpainting, and photo-realistic street view synthesis!
raniatze.github.io/pritti/
raniatze.github.io/pritti/

June 25, 2025 at 11:23 AM
Christina's new work PrITTI generates high-quality, controllable 3D semantic urban scenes in a compact primitive-based representation using a latent diffusion model. This enables applications like scene editing, inpainting, and photo-realistic street view synthesis!
raniatze.github.io/pritti/
raniatze.github.io/pritti/
Reposted by Patricia Gschoßmann
Hooray! Shaofei's "Relightable Full-body Gaussian Codec Avatars" work neuralbodies.github.io/RFGCA/ is featured in this years SIGGRAPH 2025 Technical Papers Trailer! @acmsiggraph.bsky.social:
www.youtube.com/watch?v=HfHC...
www.youtube.com/watch?v=HfHC...

SIGGRAPH 2025 Technical Papers Trailer
YouTube video by ACMSIGGRAPH
www.youtube.com
June 13, 2025 at 7:27 PM
Hooray! Shaofei's "Relightable Full-body Gaussian Codec Avatars" work neuralbodies.github.io/RFGCA/ is featured in this years SIGGRAPH 2025 Technical Papers Trailer! @acmsiggraph.bsky.social:
www.youtube.com/watch?v=HfHC...
www.youtube.com/watch?v=HfHC...
Reposted by Patricia Gschoßmann

📣 Excited to share our #CVPR2025 Spotlight paper and my internship project @wayve: SimLingo.
A Vision-Language-Action (VLA) model that achieves state-of-the-art driving performance with language capabilities.
Code: github.com/RenzKa/simli...
Paper: arxiv.org/abs/2503.09594
A Vision-Language-Action (VLA) model that achieves state-of-the-art driving performance with language capabilities.
Code: github.com/RenzKa/simli...
Paper: arxiv.org/abs/2503.09594
May 8, 2025 at 3:25 PM
📣 Excited to share our #CVPR2025 Spotlight paper and my internship project @wayve: SimLingo.
A Vision-Language-Action (VLA) model that achieves state-of-the-art driving performance with language capabilities.
Code: github.com/RenzKa/simli...
Paper: arxiv.org/abs/2503.09594
A Vision-Language-Action (VLA) model that achieves state-of-the-art driving performance with language capabilities.
Code: github.com/RenzKa/simli...
Paper: arxiv.org/abs/2503.09594
Reposted by Patricia Gschoßmann

📢 New paper CVPR 25!
Can meshes capture fuzzy geometry? Volumetric Surfaces uses adaptive textured shells to model hair, fur without the splatting / volume overhead. It’s fast, looks great, and runs in real time even on budget phones.
🔗 autonomousvision.github.io/volsurfs/
📄 arxiv.org/pdf/2409.02482
Can meshes capture fuzzy geometry? Volumetric Surfaces uses adaptive textured shells to model hair, fur without the splatting / volume overhead. It’s fast, looks great, and runs in real time even on budget phones.
🔗 autonomousvision.github.io/volsurfs/
📄 arxiv.org/pdf/2409.02482
May 5, 2025 at 1:00 PM
📢 New paper CVPR 25!
Can meshes capture fuzzy geometry? Volumetric Surfaces uses adaptive textured shells to model hair, fur without the splatting / volume overhead. It’s fast, looks great, and runs in real time even on budget phones.
🔗 autonomousvision.github.io/volsurfs/
📄 arxiv.org/pdf/2409.02482
Can meshes capture fuzzy geometry? Volumetric Surfaces uses adaptive textured shells to model hair, fur without the splatting / volume overhead. It’s fast, looks great, and runs in real time even on budget phones.
🔗 autonomousvision.github.io/volsurfs/
📄 arxiv.org/pdf/2409.02482
Reposted by Patricia Gschoßmann
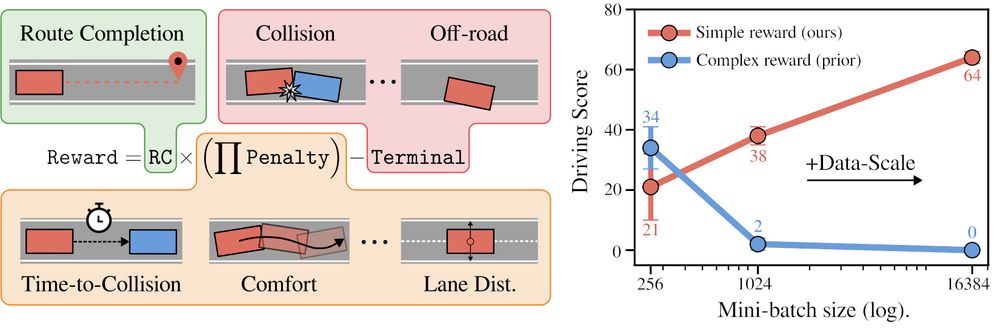
Introducing CaRL: Learning Scalable Planning Policies with Simple Rewards
We show how simple rewards enable scaling up PPO for planning.
CaRL outperforms all prior learning-based approaches on nuPlan Val14 and CARLA longest6 v2, using less inference compute.
arxiv.org/abs/2504.17838
We show how simple rewards enable scaling up PPO for planning.
CaRL outperforms all prior learning-based approaches on nuPlan Val14 and CARLA longest6 v2, using less inference compute.
arxiv.org/abs/2504.17838
April 28, 2025 at 3:17 PM
Introducing CaRL: Learning Scalable Planning Policies with Simple Rewards
We show how simple rewards enable scaling up PPO for planning.
CaRL outperforms all prior learning-based approaches on nuPlan Val14 and CARLA longest6 v2, using less inference compute.
arxiv.org/abs/2504.17838
We show how simple rewards enable scaling up PPO for planning.
CaRL outperforms all prior learning-based approaches on nuPlan Val14 and CARLA longest6 v2, using less inference compute.
arxiv.org/abs/2504.17838
Reposted by Patricia Gschoßmann
💃Excited to announce our new #3DV25 paper Unimotion, a multi-task human motion model which is able to
(1) generate motion from sequence- and frame-level text,
(2) generate detailed per-frame motion descriptions, and
(3) generate motion from random noise.
coral79.github.io/uni-motion/
(1) generate motion from sequence- and frame-level text,
(2) generate detailed per-frame motion descriptions, and
(3) generate motion from random noise.
coral79.github.io/uni-motion/
February 28, 2025 at 7:30 AM
💃Excited to announce our new #3DV25 paper Unimotion, a multi-task human motion model which is able to
(1) generate motion from sequence- and frame-level text,
(2) generate detailed per-frame motion descriptions, and
(3) generate motion from random noise.
coral79.github.io/uni-motion/
(1) generate motion from sequence- and frame-level text,
(2) generate detailed per-frame motion descriptions, and
(3) generate motion from random noise.
coral79.github.io/uni-motion/
Reposted by Patricia Gschoßmann
🚀 Names matter! We show that better class names in open-vocabulary segmentation benchmarks greatly improve dataset quality and boost model performance. RENOVATE your dataset labels with our automatic framework! #AI #ComputerVision #NeurIPS24
andrehuang.github.io/renovate/
andrehuang.github.io/renovate/

February 26, 2025 at 2:45 PM
🚀 Names matter! We show that better class names in open-vocabulary segmentation benchmarks greatly improve dataset quality and boost model performance. RENOVATE your dataset labels with our automatic framework! #AI #ComputerVision #NeurIPS24
andrehuang.github.io/renovate/
andrehuang.github.io/renovate/
Reposted by Patricia Gschoßmann
Our beginner's oriented accessible introduction to modern deep RL is now published in Foundations and Trends in Optimization. It is a great entry to the field if you want to jumpstart into RL!
@bernhard-jaeger.bsky.social
www.nowpublishers.com/article/Deta...
arxiv.org/abs/2312.08365
@bernhard-jaeger.bsky.social
www.nowpublishers.com/article/Deta...
arxiv.org/abs/2312.08365
February 22, 2025 at 7:32 PM
Our beginner's oriented accessible introduction to modern deep RL is now published in Foundations and Trends in Optimization. It is a great entry to the field if you want to jumpstart into RL!
@bernhard-jaeger.bsky.social
www.nowpublishers.com/article/Deta...
arxiv.org/abs/2312.08365
@bernhard-jaeger.bsky.social
www.nowpublishers.com/article/Deta...
arxiv.org/abs/2312.08365
Reposted by Patricia Gschoßmann
Synchronization is ubiquitous in nature and a key mechanism for information processing in the brain. We introduce AKOrN as a dynamical alternative to threshold units, which can be combined with MLPs, CNNs or Transformers. ICLR'25 Oral. Project page: takerum.github.io/akorn_projec...
February 12, 2025 at 2:07 PM
Synchronization is ubiquitous in nature and a key mechanism for information processing in the brain. We introduce AKOrN as a dynamical alternative to threshold units, which can be combined with MLPs, CNNs or Transformers. ICLR'25 Oral. Project page: takerum.github.io/akorn_projec...
Reposted by Patricia Gschoßmann
This week we had our winter retreat jointly with Daniel Cremer's group in Montafon, Austria. 46 talks, 100 Km of slopes and night sledding with some occasionally lost and found. It has been fun!




January 16, 2025 at 5:50 PM
This week we had our winter retreat jointly with Daniel Cremer's group in Montafon, Austria. 46 talks, 100 Km of slopes and night sledding with some occasionally lost and found. It has been fun!