



MuJoCo.org
@mujoco.bsky.social
An open-source physics simulator for articulated systems with contacts.
Maintained by Google DeepMind and the community. This is not an officially supported Google product.
Maintained by Google DeepMind and the community. This is not an officially supported Google product.
This work wouldn’t have been possible without the most wonderful cast of collaborators from Berkeley, U. Toronto, Cambridge, Stanford and @deepmind.google.web.brid.gy.
January 16, 2025 at 8:48 PM
This work wouldn’t have been possible without the most wonderful cast of collaborators from Berkeley, U. Toronto, Cambridge, Stanford and @deepmind.google.web.brid.gy.
You can get started today
🌐 Project page: playground.mujoco.org
📂 Code: github.com/google-deepm...
📝 Paper: playground.mujoco.org/assets/playg...
🌐 Project page: playground.mujoco.org
📂 Code: github.com/google-deepm...
📝 Paper: playground.mujoco.org/assets/playg...
MuJoCo Playground
An open-source framework for GPU-accelerated robot learning and sim-to-real transfer
playground.mujoco.org
January 16, 2025 at 8:48 PM
You can get started today
🌐 Project page: playground.mujoco.org
📂 Code: github.com/google-deepm...
📝 Paper: playground.mujoco.org/assets/playg...
🌐 Project page: playground.mujoco.org
📂 Code: github.com/google-deepm...
📝 Paper: playground.mujoco.org/assets/playg...
playground.mujoco.org integrates high throughput batch rendering on GPU with Madrona-MJX. Using this, we trained a pixel-based block picking policy within minutes - achieving robust 100% success in real world trials.
January 16, 2025 at 8:48 PM
playground.mujoco.org integrates high throughput batch rendering on GPU with Madrona-MJX. Using this, we trained a pixel-based block picking policy within minutes - achieving robust 100% success in real world trials.
With the Franka arm and playground.mujoco.org, we trained torque-controlled policies for contact-rich tasks like block reorientation. We obtain smooth, compliant and reactive behaviors running at 200Hz.
January 16, 2025 at 8:48 PM
With the Franka arm and playground.mujoco.org, we trained torque-controlled policies for contact-rich tasks like block reorientation. We obtain smooth, compliant and reactive behaviors running at 200Hz.
Locomotion is important, but what about the finer things in robotics? With playground.mujoco.org we took on the challenging task of dexterous in-hand reorientation with the open-source and low-cos LEAP hand. Our policy below was trained in 30 minutes on 2 4090s.
January 16, 2025 at 8:48 PM
Locomotion is important, but what about the finer things in robotics? With playground.mujoco.org we took on the challenging task of dexterous in-hand reorientation with the open-source and low-cos LEAP hand. Our policy below was trained in 30 minutes on 2 4090s.
playground.mujoco.org allows humanoid robots to learn robust walking on different surfaces (below: Berkeley Humanoid, see other humanoid robots on the website).
January 16, 2025 at 8:48 PM
playground.mujoco.org allows humanoid robots to learn robust walking on different surfaces (below: Berkeley Humanoid, see other humanoid robots on the website).
playground.mujoco.org makes training locomotion policies straightforward and fast:
Quadrupeds like Go1: joystick control, fall recovery, handstands and footstands trained in minutes.
Quadrupeds like Go1: joystick control, fall recovery, handstands and footstands trained in minutes.
January 16, 2025 at 8:48 PM
playground.mujoco.org makes training locomotion policies straightforward and fast:
Quadrupeds like Go1: joystick control, fall recovery, handstands and footstands trained in minutes.
Quadrupeds like Go1: joystick control, fall recovery, handstands and footstands trained in minutes.
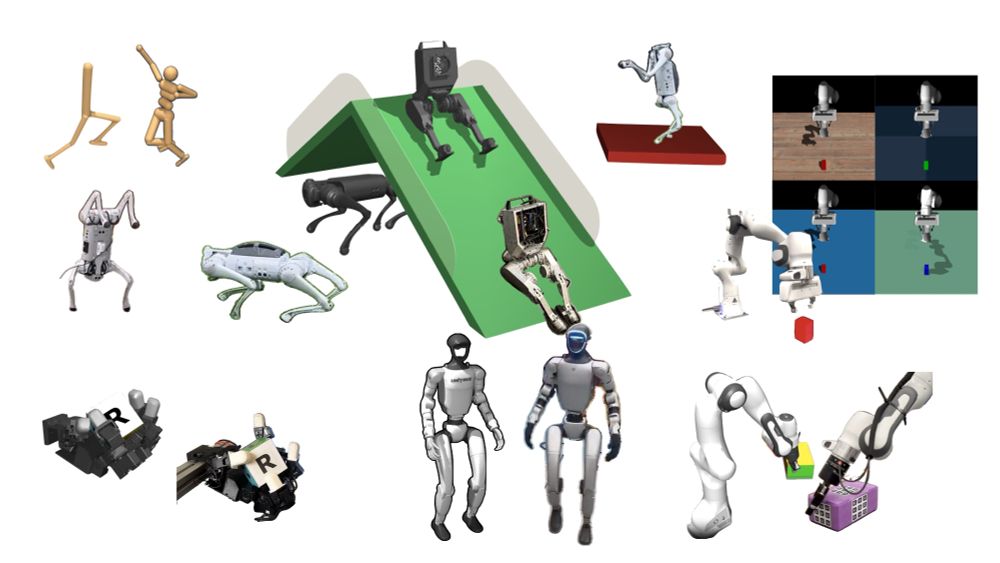
The key to fast progress in robotics? Rapid iteration loops.
playground.mujoco.org streamlines the entire process from simulation to deployment and back.
In just 8 weeks, this unlocked:
- Zero-shot transfer across 5 robots.
- Locomotion, manipulation, and vision-based control.
playground.mujoco.org streamlines the entire process from simulation to deployment and back.
In just 8 weeks, this unlocked:
- Zero-shot transfer across 5 robots.
- Locomotion, manipulation, and vision-based control.
MuJoCo Playground
An open-source framework for GPU-accelerated robot learning and sim-to-real transfer
playground.mujoco.org
January 16, 2025 at 8:48 PM
The key to fast progress in robotics? Rapid iteration loops.
playground.mujoco.org streamlines the entire process from simulation to deployment and back.
In just 8 weeks, this unlocked:
- Zero-shot transfer across 5 robots.
- Locomotion, manipulation, and vision-based control.
playground.mujoco.org streamlines the entire process from simulation to deployment and back.
In just 8 weeks, this unlocked:
- Zero-shot transfer across 5 robots.
- Locomotion, manipulation, and vision-based control.