


@mattadc.bsky.social
Day 19 learning robotics and ros. Building my own active suspension mobile robot in FreeCAD and CROSS workbench. Built a chassis, struts, and wheels. Having trouble getting the joints to all line up. Visualizing the whole robot is nice, but the placement UI is a bit challenging.

January 14, 2025 at 3:43 AM
Day 19 learning robotics and ros. Building my own active suspension mobile robot in FreeCAD and CROSS workbench. Built a chassis, struts, and wheels. Having trouble getting the joints to all line up. Visualizing the whole robot is nice, but the placement UI is a bit challenging.
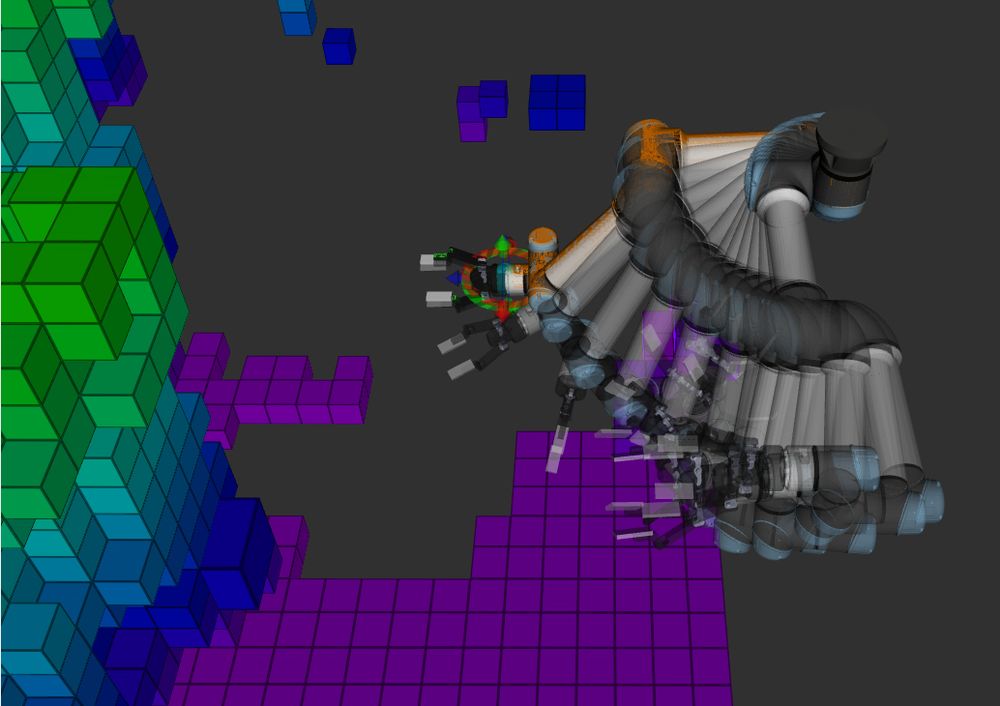
Day 18 learning robotics and ros. Connected the gazebo depth sensor to the planning environment makes octree of blocks for occupied regions where the sensor detects objects. Collision check between the blocks and the robot arm allows for collision free planning in the real world.

January 11, 2025 at 1:55 AM
Day 18 learning robotics and ros. Connected the gazebo depth sensor to the planning environment makes octree of blocks for occupied regions where the sensor detects objects. Collision check between the blocks and the robot arm allows for collision free planning in the real world.
Day 17 learning robotics and ros. Lots of pieces coming together now as I added a simulated sensor to see my simulated robot. The planner (with some help from me) can see the virtual scene the same way it would on a real robot. Very cool. Even has physics for the gripper pickup.

January 8, 2025 at 2:42 AM
Day 17 learning robotics and ros. Lots of pieces coming together now as I added a simulated sensor to see my simulated robot. The planner (with some help from me) can see the virtual scene the same way it would on a real robot. Very cool. Even has physics for the gripper pickup.
Day 16 learning robotics and ros. This actually took more than a day because I was stuck. Joint limits on my model and planning limits and goal waypoint all being identical caused nothing to move but no useful errors. Finally got my arm and gripper moving in the simulator via ros_control and moveit.

January 7, 2025 at 2:52 AM
Day 16 learning robotics and ros. This actually took more than a day because I was stuck. Joint limits on my model and planning limits and goal waypoint all being identical caused nothing to move but no useful errors. Finally got my arm and gripper moving in the simulator via ros_control and moveit.
Day 14/15 learning robotics and ros. By far the hardest days so far. Between the sim, controller, and moveit planner, there are tons of config variables that need to be set properly and match in order for the system to communicate. Tools for configuration flow seem to be lacking.
December 30, 2024 at 3:57 AM
Day 14/15 learning robotics and ros. By far the hardest days so far. Between the sim, controller, and moveit planner, there are tons of config variables that need to be set properly and match in order for the system to communicate. Tools for configuration flow seem to be lacking.
Day 13 learning robotics and ros. Successfully modified a standard robot by adding my own custom gripper. Really enjoying Xacro as a method for chaining existing components, but also as a way for simplifying repeated operations, like inertia blocks, within existing robot models.

December 28, 2024 at 3:00 AM
Day 13 learning robotics and ros. Successfully modified a standard robot by adding my own custom gripper. Really enjoying Xacro as a method for chaining existing components, but also as a way for simplifying repeated operations, like inertia blocks, within existing robot models.
Day 12 learning robotics and ros. Back in FreeCAD to modify my robot by building a custom gripper. Smooth transition from CAD to Gazebo thanks to CROSS Workbench. Really helpful to see visual rep of frames and joints in CAD to debug before doing the whole export process.

December 27, 2024 at 3:12 AM
Day 12 learning robotics and ros. Back in FreeCAD to modify my robot by building a custom gripper. Smooth transition from CAD to Gazebo thanks to CROSS Workbench. Really helpful to see visual rep of frames and joints in CAD to debug before doing the whole export process.
Day 11 learning robotics and ros. Small detour today to focus on exploring nodes and how they talk with topics, services, and actions. I wish there were better tools for this. The old rqt_graph tool from the ros1 days doesn't render well. Or are these graphs always a big mess?
December 24, 2024 at 3:11 AM
Day 11 learning robotics and ros. Small detour today to focus on exploring nodes and how they talk with topics, services, and actions. I wish there were better tools for this. The old rqt_graph tool from the ros1 days doesn't render well. Or are these graphs always a big mess?
Day 10 learning robotics. Switching over to arms now. Amazing how much functionality is available for free to drive an arm. Kinematics, collision free planning, sensor integration, GUI tools for defining tasks, scripting. All available free out of the box. It's an amazing time to be a beginner.
December 23, 2024 at 2:15 AM
Day 10 learning robotics. Switching over to arms now. Amazing how much functionality is available for free to drive an arm. Kinematics, collision free planning, sensor integration, GUI tools for defining tasks, scripting. All available free out of the box. It's an amazing time to be a beginner.
Day 9 learning robotics. Doing some research into an interesting robot to model from scratch and simulate doing something useful. I'm thinking that some sort of active suspension wheeled robot is a good step up from the basic mobile base. Probably not gonna go with the balancing one, too unstable.

December 22, 2024 at 3:35 AM
Day 9 learning robotics. Doing some research into an interesting robot to model from scratch and simulate doing something useful. I'm thinking that some sort of active suspension wheeled robot is a good step up from the basic mobile base. Probably not gonna go with the balancing one, too unstable.
Day 7+8 of learning robotics and ros. Everyone talks about the sim-to-real problem, but for beginners the cad-to-sim is often a big barrier. Learning about urdf and model import and using the FreeCAD CROSS workbench to visualize models and make modifications in 3d instead of in text files. Big help!

December 21, 2024 at 2:11 AM
Day 7+8 of learning robotics and ros. Everyone talks about the sim-to-real problem, but for beginners the cad-to-sim is often a big barrier. Learning about urdf and model import and using the FreeCAD CROSS workbench to visualize models and make modifications in 3d instead of in text files. Big help!
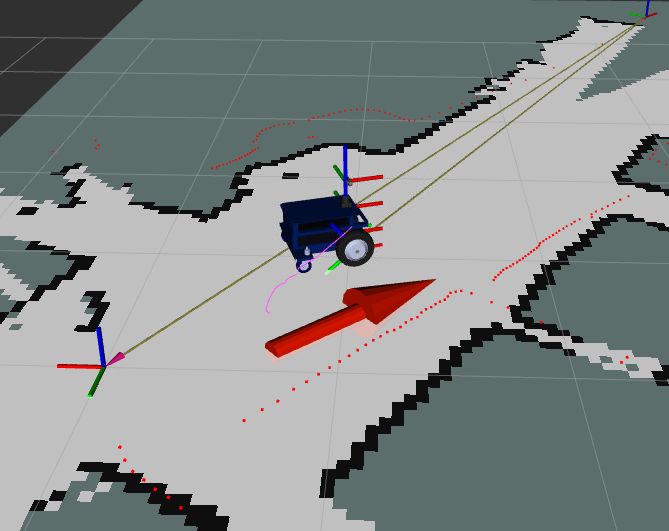
Day 6 learning robotics and ros. Driving via nav2 and programmatically generated drive targets (big red arrow). Great when it works. When it doesn't, though, it does highlight the problem of "where do I even start" to debug when things don't go as planned. Need lots more logging on the command side.
December 19, 2024 at 11:22 PM
Day 6 learning robotics and ros. Driving via nav2 and programmatically generated drive targets (big red arrow). Great when it works. When it doesn't, though, it does highlight the problem of "where do I even start" to debug when things don't go as planned. Need lots more logging on the command side.
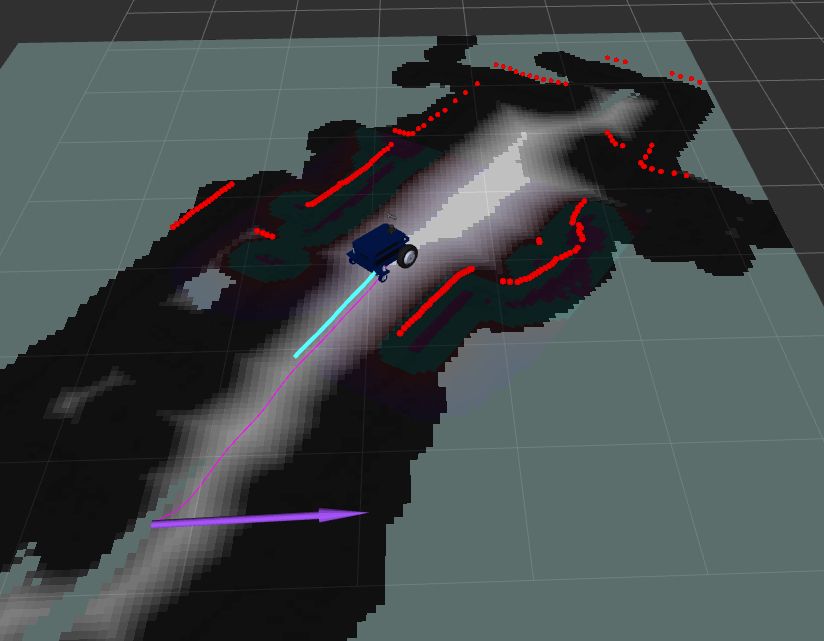
Day 5 of learning robotics and ros. Testing autonomous driving with nav2, looking at cost maps. Because so much amazing functionality exists already, it's an interesting teaching modality to show the entire workings of a complex system and then peel back the layers to see how it's done. I love it.
December 19, 2024 at 2:53 AM
Day 5 of learning robotics and ros. Testing autonomous driving with nav2, looking at cost maps. Because so much amazing functionality exists already, it's an interesting teaching modality to show the entire workings of a complex system and then peel back the layers to see how it's done. I love it.
Day 4 of learning robotics and ros. Jumping into the SLAM toolbox to drive around in gazebo and look at how the work gets mapped by lidar. Good to see a realistic application. The the map frame jumps around a lot as I drive. It also gets completely broken if I bump into anything.

December 18, 2024 at 4:27 AM
Day 4 of learning robotics and ros. Jumping into the SLAM toolbox to drive around in gazebo and look at how the work gets mapped by lidar. Good to see a realistic application. The the map frame jumps around a lot as I drive. It also gets completely broken if I bump into anything.
Day 3 of my robotics challenge. Working with Rviz and Gazebo together now. I always love seeing data from different sensors line up so perfectly. I know it's simulation so of course it will, but it still feels like a victory, especially when no rendered in the robot frame.

December 17, 2024 at 3:01 AM
Day 3 of my robotics challenge. Working with Rviz and Gazebo together now. I always love seeing data from different sensors line up so perfectly. I know it's simulation so of course it will, but it still feels like a victory, especially when no rendered in the robot frame.
Day 2 of 28 learning robotics and ros. Poking around under the hood with topics, nodes, message types and the like. Despite the fact that I've been doing this for a while I was surprised to finally notice that ros params are just a wrapper on a set of service calls.
December 16, 2024 at 3:04 AM
Day 2 of 28 learning robotics and ros. Poking around under the hood with topics, nodes, message types and the like. Despite the fact that I've been doing this for a while I was surprised to finally notice that ros params are just a wrapper on a set of service calls.
Day 1 of my learning robotics challenge course. Docker. Everything in Docker. Not sure how I feel about this. For distributing content for a course to make sure everyone is on the same environment sure, but is this really a solution for production? Does anyone run a robot in production with Docker?
December 15, 2024 at 2:38 AM
Day 1 of my learning robotics challenge course. Docker. Everything in Docker. Not sure how I feel about this. For distributing content for a course to make sure everyone is on the same environment sure, but is this really a solution for production? Does anyone run a robot in production with Docker?
I'm starting a 28 day robotics programming challenge today. If any of my followers have advice for good, small, standalone coding projects for robotics engineers, I'm all ears.
December 15, 2024 at 1:57 AM
I'm starting a 28 day robotics programming challenge today. If any of my followers have advice for good, small, standalone coding projects for robotics engineers, I'm all ears.