




Marius M. Kästingschäfer
@mariusm.bsky.social
Ph.D. Student @ University of Freiburg | Research Scientist @ Continental AI Lab
I am excited to share that our work appeared at the IEEE/CVF Winter Conference on Applications of Computer Vision (WACV), where I presented our Poster (12/13) #WACV2025

March 29, 2025 at 4:07 PM
I am excited to share that our work appeared at the IEEE/CVF Winter Conference on Applications of Computer Vision (WACV), where I presented our Poster (12/13) #WACV2025
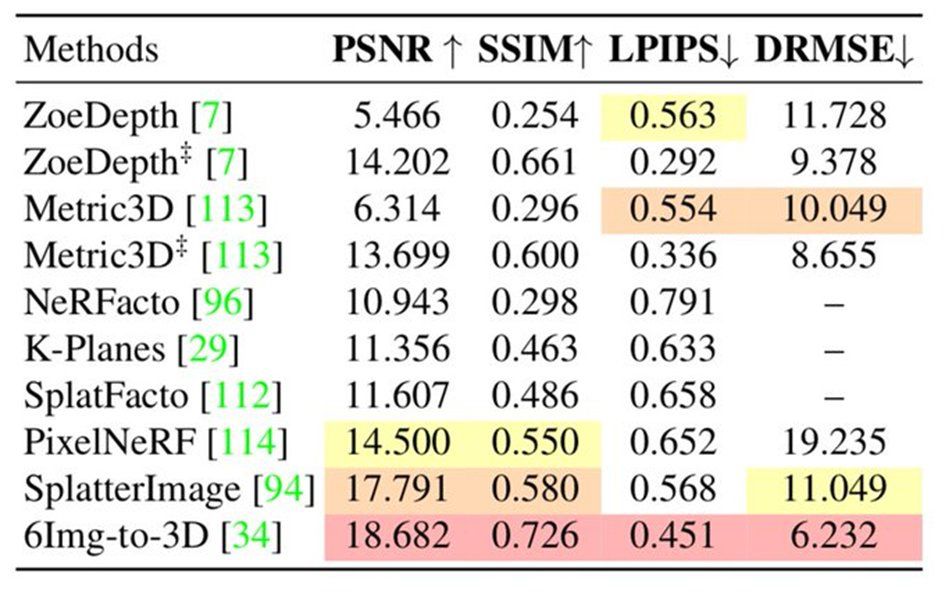
💡We also measure models on a few-image-to-3D benchmark. The task here is to render exocentric views using only egocentric views. We test monocular depth methods, iterative per-scene optimization methods, and feedforward methods (8/13)

March 29, 2025 at 4:07 PM
💡We also measure models on a few-image-to-3D benchmark. The task here is to render exocentric views using only egocentric views. We test monocular depth methods, iterative per-scene optimization methods, and feedforward methods (8/13)
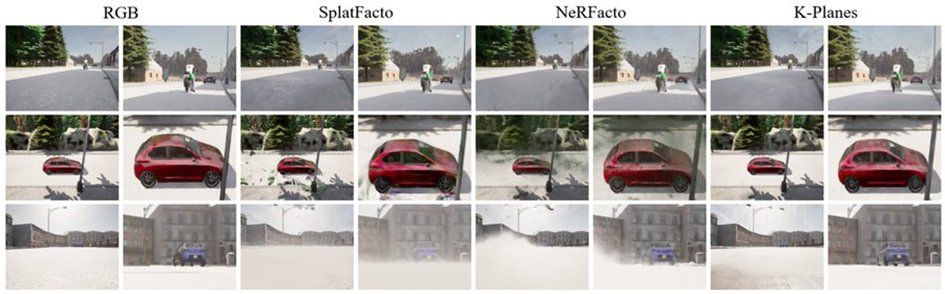
🔍We perform several tests on the static dataset. Our first benchmark trains per-scene optimization methods on inward-facing views. All models are trained on 80 exocentric views and evaluated on the remaining 20 exocentric views (7/13)

March 29, 2025 at 4:07 PM
🔍We perform several tests on the static dataset. Our first benchmark trains per-scene optimization methods on inward-facing views. All models are trained on 80 exocentric views and evaluated on the remaining 20 exocentric views (7/13)
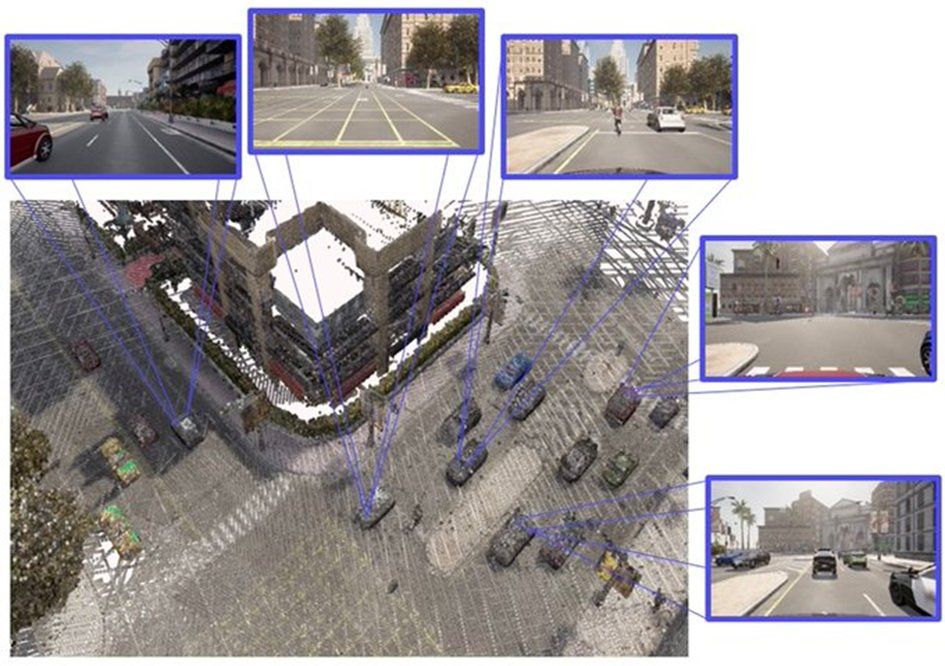
📁Using our data generator, we create two large-scale datasets, one Static and one Dynamic Ego-Exo dataset (6/13)

March 29, 2025 at 4:07 PM
📁Using our data generator, we create two large-scale datasets, one Static and one Dynamic Ego-Exo dataset (6/13)
🚀 Using our code, we can simultaneously collect both egocentric and exocentric viewpoints from multiple vehicles in dynamic scenes (5/13)
March 29, 2025 at 4:07 PM
🚀 Using our code, we can simultaneously collect both egocentric and exocentric viewpoints from multiple vehicles in dynamic scenes (5/13)
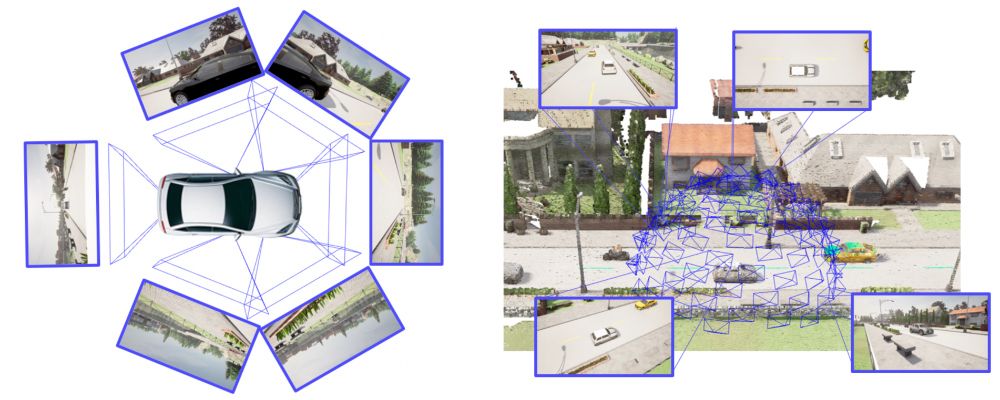
📷 Our data generator, out of the box, supports modeling camera setups from datasets like nuScenes and Waymo, and new ones can be added with little effort (4/13)

March 29, 2025 at 4:07 PM
📷 Our data generator, out of the box, supports modeling camera setups from datasets like nuScenes and Waymo, and new ones can be added with little effort (4/13)
💻Our customizable data generator is built on top of the Carla autonomous driving simulator. All output data is richly annotated and collected in a format suitable for NerfStudio (3/13)

March 29, 2025 at 4:07 PM
💻Our customizable data generator is built on top of the Carla autonomous driving simulator. All output data is richly annotated and collected in a format suitable for NerfStudio (3/13)
🚗 Driving data is usually egocentric, with common datasets such as nuScenes and Waymo. For 3D and 4D reconstruction tasks we would ideally like to have both egocentric and exocentric data. With our synthetic data generator, such data can be obtained (2/13)
March 29, 2025 at 4:07 PM
🚗 Driving data is usually egocentric, with common datasets such as nuScenes and Waymo. For 3D and 4D reconstruction tasks we would ideally like to have both egocentric and exocentric data. With our synthetic data generator, such data can be obtained (2/13)
🧵Excited to share our latest work: SEED4D - A large-scale Synthetic Ego-Exo Dynamic 4D Driving Dataset, Data Generator and Benchmarks (1/13)

March 29, 2025 at 4:07 PM
🧵Excited to share our latest work: SEED4D - A large-scale Synthetic Ego-Exo Dynamic 4D Driving Dataset, Data Generator and Benchmarks (1/13)