


Georg Martius @ ICML
@gmartius.bsky.social
Prof. Uni Tübingen, Machine Learning, Robotics, Haptics
Here at #EWRL: demonstration of autonomous tomato harvesting by polybot.eu
#Robot #Harvesting #Learning
#Robot #Harvesting #Learning
September 17, 2025 at 1:42 PM
Here at #EWRL: demonstration of autonomous tomato harvesting by polybot.eu
#Robot #Harvesting #Learning
#Robot #Harvesting #Learning
Fascinating talk by Amy Zhang
on Proto Successor Measures at #EWRL 2025.
euro-workshop-on-reinforcement-learning.github.io/ewrl18/progr...
#reinforcementlearning #robotics #machinelearning
on Proto Successor Measures at #EWRL 2025.
euro-workshop-on-reinforcement-learning.github.io/ewrl18/progr...
#reinforcementlearning #robotics #machinelearning

September 17, 2025 at 8:21 AM
Fascinating talk by Amy Zhang
on Proto Successor Measures at #EWRL 2025.
euro-workshop-on-reinforcement-learning.github.io/ewrl18/progr...
#reinforcementlearning #robotics #machinelearning
on Proto Successor Measures at #EWRL 2025.
euro-workshop-on-reinforcement-learning.github.io/ewrl18/progr...
#reinforcementlearning #robotics #machinelearning
Sergey Levine was just presenting in the Exploration in AI @ #ICML2025 and promoted that exploration needs to be grounded, and that VLMs are a good source ;-) Check our paper below
👇
👇

July 19, 2025 at 5:47 PM
Sergey Levine was just presenting in the Exploration in AI @ #ICML2025 and promoted that exploration needs to be grounded, and that VLMs are a good source ;-) Check our paper below
👇
👇
Getting from Tübingen participating in the Huggingface LeRobot hackathon!
#Huggingface #Robotarm #hackathon #PhysicalAI #TuebingenAI
huggingface.co/spaces/LeRob...
#Huggingface #Robotarm #hackathon #PhysicalAI #TuebingenAI
huggingface.co/spaces/LeRob...

June 14, 2025 at 1:41 PM
Getting from Tübingen participating in the Huggingface LeRobot hackathon!
#Huggingface #Robotarm #hackathon #PhysicalAI #TuebingenAI
huggingface.co/spaces/LeRob...
#Huggingface #Robotarm #hackathon #PhysicalAI #TuebingenAI
huggingface.co/spaces/LeRob...
Excited to be at the opening of the BITS: Bionic Intelligence Tübingen Stuttgart.
www.bionic-intelligence.org
Intro by Syn Schmitt.
Looking forward to great collaborative research!
www.bionic-intelligence.org
Intro by Syn Schmitt.
Looking forward to great collaborative research!

May 20, 2025 at 5:16 PM
Excited to be at the opening of the BITS: Bionic Intelligence Tübingen Stuttgart.
www.bionic-intelligence.org
Intro by Syn Schmitt.
Looking forward to great collaborative research!
www.bionic-intelligence.org
Intro by Syn Schmitt.
Looking forward to great collaborative research!
Corrected figure...
April 4, 2025 at 9:40 AM
Corrected figure...
10/10
Surprise bonus 🎁
Without explicit physics priors, 3DGSim also learns lighting & shadows 💡🕶️ as part of “dynamics” — showing its ability to model complex, diverse scene factors 🌍
Surprise bonus 🎁
Without explicit physics priors, 3DGSim also learns lighting & shadows 💡🕶️ as part of “dynamics” — showing its ability to model complex, diverse scene factors 🌍
April 4, 2025 at 9:08 AM
10/10
Surprise bonus 🎁
Without explicit physics priors, 3DGSim also learns lighting & shadows 💡🕶️ as part of “dynamics” — showing its ability to model complex, diverse scene factors 🌍
Surprise bonus 🎁
Without explicit physics priors, 3DGSim also learns lighting & shadows 💡🕶️ as part of “dynamics” — showing its ability to model complex, diverse scene factors 🌍
9/10
Generalization? 🤔
Trained only on single-object-ground collisions, 3DGSim still handles multi-object interactions 📷 — preserving each object’s structure 🧱
Generalization? 🤔
Trained only on single-object-ground collisions, 3DGSim still handles multi-object interactions 📷 — preserving each object’s structure 🧱
April 4, 2025 at 9:08 AM
9/10
Generalization? 🤔
Trained only on single-object-ground collisions, 3DGSim still handles multi-object interactions 📷 — preserving each object’s structure 🧱
Generalization? 🤔
Trained only on single-object-ground collisions, 3DGSim still handles multi-object interactions 📷 — preserving each object’s structure 🧱
8/10
Editability! ✏️🧩
Because 3DGSim uses an explicit 3D Gaussian representation, we can modify objects or environments mid-simulation—great for counterfactuals, scenario exploration, and modular setups.
Editability! ✏️🧩
Because 3DGSim uses an explicit 3D Gaussian representation, we can modify objects or environments mid-simulation—great for counterfactuals, scenario exploration, and modular setups.

April 4, 2025 at 9:08 AM
8/10
Editability! ✏️🧩
Because 3DGSim uses an explicit 3D Gaussian representation, we can modify objects or environments mid-simulation—great for counterfactuals, scenario exploration, and modular setups.
Editability! ✏️🧩
Because 3DGSim uses an explicit 3D Gaussian representation, we can modify objects or environments mid-simulation—great for counterfactuals, scenario exploration, and modular setups.
7/10
Results!
3DGSim accurately simulates cloth, elastic, and rigid dynamics, capturing realistic motions and interactions across diverse scenarios.
Results!
3DGSim accurately simulates cloth, elastic, and rigid dynamics, capturing realistic motions and interactions across diverse scenarios.
April 4, 2025 at 9:08 AM
7/10
Results!
3DGSim accurately simulates cloth, elastic, and rigid dynamics, capturing realistic motions and interactions across diverse scenarios.
Results!
3DGSim accurately simulates cloth, elastic, and rigid dynamics, capturing realistic motions and interactions across diverse scenarios.
6/10
We introduce three challenging datasets capturing distinct physical phenomena—rigid, elastic, and cloth dynamics (anchored at corners requiring implicit constraint learning)—each spanning unique interactions and deformation characteristics.
We introduce three challenging datasets capturing distinct physical phenomena—rigid, elastic, and cloth dynamics (anchored at corners requiring implicit constraint learning)—each spanning unique interactions and deformation characteristics.

April 4, 2025 at 9:08 AM
6/10
We introduce three challenging datasets capturing distinct physical phenomena—rigid, elastic, and cloth dynamics (anchored at corners requiring implicit constraint learning)—each spanning unique interactions and deformation characteristics.
We introduce three challenging datasets capturing distinct physical phenomena—rigid, elastic, and cloth dynamics (anchored at corners requiring implicit constraint learning)—each spanning unique interactions and deformation characteristics.
5/10
We extend MVSplat to support per-particle latent features, enabling latent 3D reconstruction—straight from multi-view RGB!
We extend MVSplat to support per-particle latent features, enabling latent 3D reconstruction—straight from multi-view RGB!

April 4, 2025 at 9:08 AM
5/10
We extend MVSplat to support per-particle latent features, enabling latent 3D reconstruction—straight from multi-view RGB!
We extend MVSplat to support per-particle latent features, enabling latent 3D reconstruction—straight from multi-view RGB!
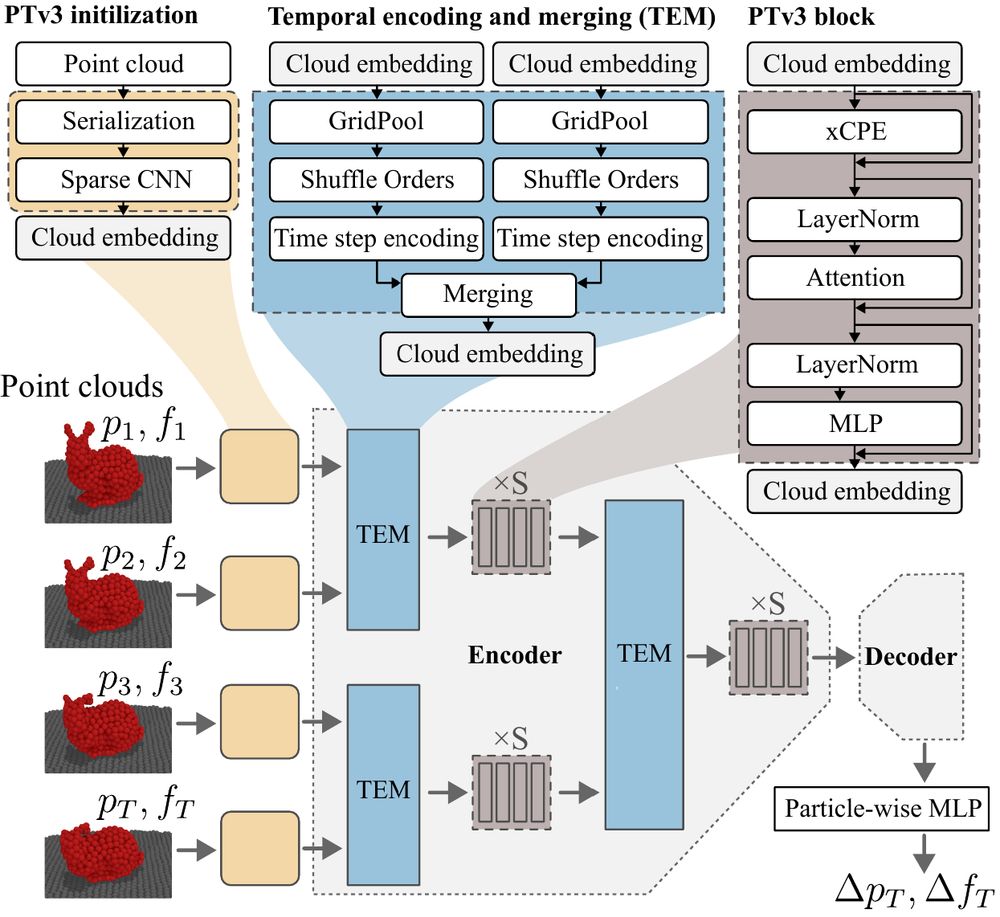
4/10
Powered by TEM-PTV3, our dynamic transformer hierarchically aggregates spatial information and systematically merges particle sets across timesteps, creating a unified, evolving 3D representation for simulations.
Powered by TEM-PTV3, our dynamic transformer hierarchically aggregates spatial information and systematically merges particle sets across timesteps, creating a unified, evolving 3D representation for simulations.

April 4, 2025 at 9:08 AM
4/10
Powered by TEM-PTV3, our dynamic transformer hierarchically aggregates spatial information and systematically merges particle sets across timesteps, creating a unified, evolving 3D representation for simulations.
Powered by TEM-PTV3, our dynamic transformer hierarchically aggregates spatial information and systematically merges particle sets across timesteps, creating a unified, evolving 3D representation for simulations.
3/10
What’s novel?
3DGSim skips heavy biases (e.g., GNNs) & ground-truth 3D data (e.g., VPD). Training inverse rendering + dynamics end to end lets the encoder learn particle latents that capture both physical and visual aspects.
What’s novel?
3DGSim skips heavy biases (e.g., GNNs) & ground-truth 3D data (e.g., VPD). Training inverse rendering + dynamics end to end lets the encoder learn particle latents that capture both physical and visual aspects.
April 4, 2025 at 9:08 AM
3/10
What’s novel?
3DGSim skips heavy biases (e.g., GNNs) & ground-truth 3D data (e.g., VPD). Training inverse rendering + dynamics end to end lets the encoder learn particle latents that capture both physical and visual aspects.
What’s novel?
3DGSim skips heavy biases (e.g., GNNs) & ground-truth 3D data (e.g., VPD). Training inverse rendering + dynamics end to end lets the encoder learn particle latents that capture both physical and visual aspects.
2/10
Website:
🔗 mikel-zhobro.github.io/3dgsim
#GaussianSplatting #Simulation #Inversegraphics #MachineLearning #ComputerVision
3DGSim encodes each frame as a 3D Gaussian particle set ✨, the dynamics transformer handles dynamics 🔄🌍, and 3D Gaussian splatting renders the scene 🎨
Website:
🔗 mikel-zhobro.github.io/3dgsim
#GaussianSplatting #Simulation #Inversegraphics #MachineLearning #ComputerVision
3DGSim encodes each frame as a 3D Gaussian particle set ✨, the dynamics transformer handles dynamics 🔄🌍, and 3D Gaussian splatting renders the scene 🎨

April 4, 2025 at 9:08 AM
2/10
Website:
🔗 mikel-zhobro.github.io/3dgsim
#GaussianSplatting #Simulation #Inversegraphics #MachineLearning #ComputerVision
3DGSim encodes each frame as a 3D Gaussian particle set ✨, the dynamics transformer handles dynamics 🔄🌍, and 3D Gaussian splatting renders the scene 🎨
Website:
🔗 mikel-zhobro.github.io/3dgsim
#GaussianSplatting #Simulation #Inversegraphics #MachineLearning #ComputerVision
3DGSim encodes each frame as a 3D Gaussian particle set ✨, the dynamics transformer handles dynamics 🔄🌍, and 3D Gaussian splatting renders the scene 🎨
Ready to host GSO 2025 in Tübingen.
www.guided-self.org/gso-2025.html
www.guided-self.org/gso-2025.html


February 12, 2025 at 8:05 AM
Ready to host GSO 2025 in Tübingen.
www.guided-self.org/gso-2025.html
www.guided-self.org/gso-2025.html