




Zac Manchester
@zacmanchester.bsky.social
Assistant Professor of Robotics at CMU, Engineer, Spacecraft Hacker.
Reposted by Zac Manchester

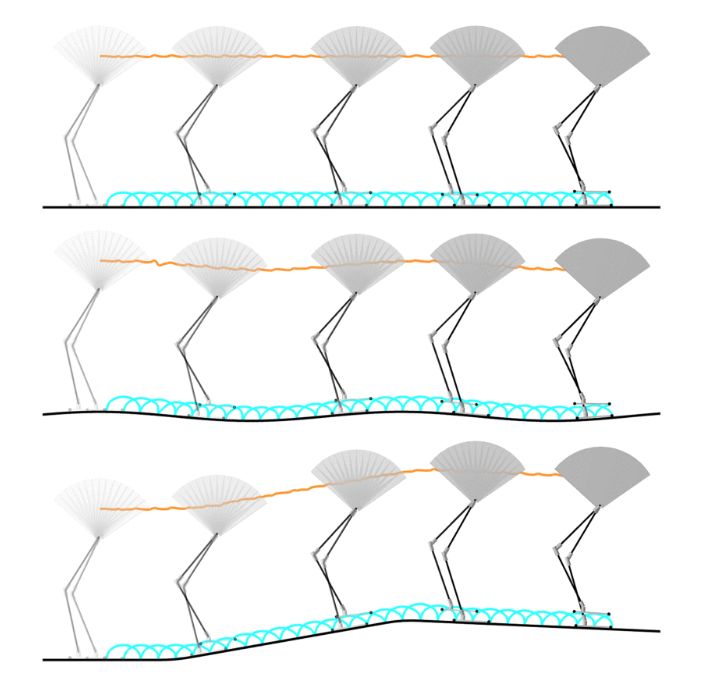
This T-RO paper will be presented at #ICRA2025 develops a Contact-Implicit MPC method for controlling #robots making/breaking contact. The bilevel planner uses LCPs to reason about contact timing/forces online, generating new contact modes in real-time.
ieeexplore.ieee.org/document/103...
ieeexplore.ieee.org/document/103...
May 13, 2025 at 9:28 PM
This T-RO paper will be presented at #ICRA2025 develops a Contact-Implicit MPC method for controlling #robots making/breaking contact. The bilevel planner uses LCPs to reason about contact timing/forces online, generating new contact modes in real-time.
ieeexplore.ieee.org/document/103...
ieeexplore.ieee.org/document/103...
Did a fun lecture this week on data-drive control with hints of behavior cloning and diffusion policies, but all grounded in classical linear systems theory. Most of the ideas are drawn from the behavioral control theory literature: youtu.be/fnajY4Ip13w?...

Optimal Control (CMU 16-745) 2024 Lecture 24: Data-Driven Control and Behavior Cloning
YouTube video by CMU Robotic Exploration Lab
youtu.be
April 19, 2025 at 10:42 PM
Did a fun lecture this week on data-drive control with hints of behavior cloning and diffusion policies, but all grounded in classical linear systems theory. Most of the ideas are drawn from the behavioral control theory literature: youtu.be/fnajY4Ip13w?...
Had a great visit to MIT for the robotics seminar a couple of weeks ago: www.youtube.com/watch?v=eSle...

MIT Robotics - Zac Manchester - Composable Optimization for Robotic Motion Planning and Control
YouTube video by MIT Robotics
www.youtube.com
March 21, 2025 at 3:52 AM
Had a great visit to MIT for the robotics seminar a couple of weeks ago: www.youtube.com/watch?v=eSle...
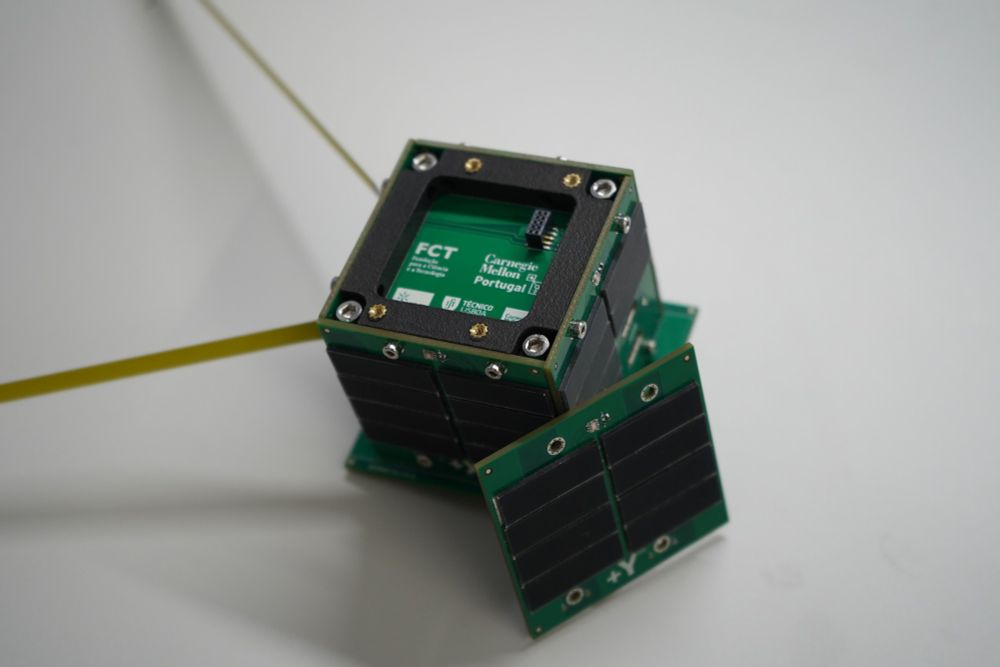
Just made first contact with our satellite PROMETHEUS-1 in collaboration with @cmurexlab.bsky.social @istecnico.bsky.social @uminho.bsky.social @cmurobotics.bsky.social @scsatcmu.bsky.social
See where our satellite is here: tinygs.com/satellite/PR...
See where our satellite is here: tinygs.com/satellite/PR...
January 23, 2025 at 10:58 PM
Just made first contact with our satellite PROMETHEUS-1 in collaboration with @cmurexlab.bsky.social @istecnico.bsky.social @uminho.bsky.social @cmurobotics.bsky.social @scsatcmu.bsky.social
See where our satellite is here: tinygs.com/satellite/PR...
See where our satellite is here: tinygs.com/satellite/PR...
Cool work by my student @fogmb.bsky.social trying to scale joint robot design and control optimization to realistic problems. These are super challenging optimization problems that are often handled separately by expert designers. We're trying to automate it.
🚀 Co-Optimizing Robots for Performance 🚀
🌟 CAPO: A scalable optimization method:
✅ Jointly optimizes actuators & control traj.
✅ Scales to complex systems
✅ Finds robust, efficient designs
🏋️ Tested on:
🚁 Multirotors 🛰️ Space structures 🧥 Cloth 🐟 Soft robots
📄 rexlab.ri.cmu.edu/papers/CAPO_...
🌟 CAPO: A scalable optimization method:
✅ Jointly optimizes actuators & control traj.
✅ Scales to complex systems
✅ Finds robust, efficient designs
🏋️ Tested on:
🚁 Multirotors 🛰️ Space structures 🧥 Cloth 🐟 Soft robots
📄 rexlab.ri.cmu.edu/papers/CAPO_...
December 10, 2024 at 2:47 PM
Cool work by my student @fogmb.bsky.social trying to scale joint robot design and control optimization to realistic problems. These are super challenging optimization problems that are often handled separately by expert designers. We're trying to automate it.
Reposted by Zac Manchester

🚀 Co-Optimizing Robots for Performance 🚀
🌟 CAPO: A scalable optimization method:
✅ Jointly optimizes actuators & control traj.
✅ Scales to complex systems
✅ Finds robust, efficient designs
🏋️ Tested on:
🚁 Multirotors 🛰️ Space structures 🧥 Cloth 🐟 Soft robots
📄 rexlab.ri.cmu.edu/papers/CAPO_...
🌟 CAPO: A scalable optimization method:
✅ Jointly optimizes actuators & control traj.
✅ Scales to complex systems
✅ Finds robust, efficient designs
🏋️ Tested on:
🚁 Multirotors 🛰️ Space structures 🧥 Cloth 🐟 Soft robots
📄 rexlab.ri.cmu.edu/papers/CAPO_...
December 10, 2024 at 2:11 PM
🚀 Co-Optimizing Robots for Performance 🚀
🌟 CAPO: A scalable optimization method:
✅ Jointly optimizes actuators & control traj.
✅ Scales to complex systems
✅ Finds robust, efficient designs
🏋️ Tested on:
🚁 Multirotors 🛰️ Space structures 🧥 Cloth 🐟 Soft robots
📄 rexlab.ri.cmu.edu/papers/CAPO_...
🌟 CAPO: A scalable optimization method:
✅ Jointly optimizes actuators & control traj.
✅ Scales to complex systems
✅ Finds robust, efficient designs
🏋️ Tested on:
🚁 Multirotors 🛰️ Space structures 🧥 Cloth 🐟 Soft robots
📄 rexlab.ri.cmu.edu/papers/CAPO_...
Reposted by Zac Manchester

End of an era as Kevin Tracy defends his PhD. Kevin has been with the lab since the very beginning at Stanford, through the move to CMU. He's done amazing optimization-based control work with applications spanning aerospace and robotics and it has been an absolute pleasure working with him.

November 22, 2024 at 7:08 PM
End of an era as Kevin Tracy defends his PhD. Kevin has been with the lab since the very beginning at Stanford, through the move to CMU. He's done amazing optimization-based control work with applications spanning aerospace and robotics and it has been an absolute pleasure working with him.