



Haofei Xu
@haofeixu.bsky.social
PhD student at ETH Zurich & University of Tübingen, working on 3D Vision
https://haofeixu.github.io/
https://haofeixu.github.io/
🚀Excited to share our recent work on test-time scaling for feed-forward Gaussian splatting:
we learn a recurrent model ReSplat that is able to iteratively improve the reconstruction quality in a feed-forward manner!
haofeixu.github.io/resplat/
we learn a recurrent model ReSplat that is able to iteratively improve the reconstruction quality in a feed-forward manner!
haofeixu.github.io/resplat/
October 10, 2025 at 8:12 PM
🚀Excited to share our recent work on test-time scaling for feed-forward Gaussian splatting:
we learn a recurrent model ReSplat that is able to iteratively improve the reconstruction quality in a feed-forward manner!
haofeixu.github.io/resplat/
we learn a recurrent model ReSplat that is able to iteratively improve the reconstruction quality in a feed-forward manner!
haofeixu.github.io/resplat/
Check out Frano's amazing work on multi-view 3D point tracking! 🚀 Code, models, datasets, and interactive results — all available!

1/4 🚀 We’re excited to release MVTracker (ICCV 2025 Oral), the first data-driven multi-view 3D point tracker. MVTracker tracks arbitrary 3D points across multiple cameras, handling occlusions and varied camera setups without per-sequence optimization.

August 29, 2025 at 3:20 PM
Check out Frano's amazing work on multi-view 3D point tracking! 🚀 Code, models, datasets, and interactive results — all available!
Reposted by Haofei Xu

🚀 Introducing our new paper, MDPO: Overcoming the Training-Inference Divide of Masked Diffusion Language Models.
📄 Paper: www.scholar-inbox.com/papers/He202...
arxiv.org/pdf/2508.13148
💻 Code: github.com/autonomousvi...
🌐 Project Page: cli212.github.io/MDPO/
📄 Paper: www.scholar-inbox.com/papers/He202...
arxiv.org/pdf/2508.13148
💻 Code: github.com/autonomousvi...
🌐 Project Page: cli212.github.io/MDPO/
August 20, 2025 at 9:30 AM
🚀 Introducing our new paper, MDPO: Overcoming the Training-Inference Divide of Masked Diffusion Language Models.
📄 Paper: www.scholar-inbox.com/papers/He202...
arxiv.org/pdf/2508.13148
💻 Code: github.com/autonomousvi...
🌐 Project Page: cli212.github.io/MDPO/
📄 Paper: www.scholar-inbox.com/papers/He202...
arxiv.org/pdf/2508.13148
💻 Code: github.com/autonomousvi...
🌐 Project Page: cli212.github.io/MDPO/
Wanna scale your feed-forward Gaussian Splatting model to 4K resolution? Come check out our #CVPR2025 poster PanSplat today 10:30–12:30 (June 14) at ExHall D, Poster #74!
June 14, 2025 at 5:06 AM
Wanna scale your feed-forward Gaussian Splatting model to 4K resolution? Come check out our #CVPR2025 poster PanSplat today 10:30–12:30 (June 14) at ExHall D, Poster #74!
Reposted by Haofei Xu

Your personalized CVPR 25 @cvprconference.bsky.social conference programs are now available for you!
www.scholar-inbox.com/conference/c...
www.scholar-inbox.com/conference/c...
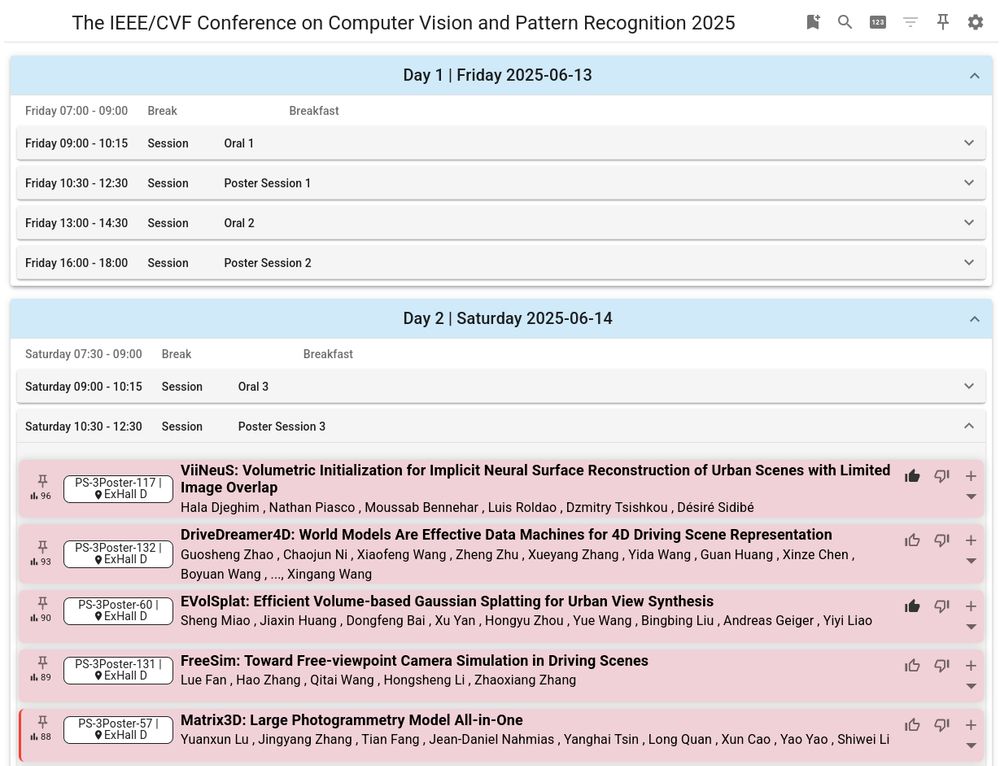
June 5, 2025 at 6:16 AM
Your personalized CVPR 25 @cvprconference.bsky.social conference programs are now available for you!
www.scholar-inbox.com/conference/c...
www.scholar-inbox.com/conference/c...
Excited to present our #CVPR2025 paper DepthSplat next week!
DepthSplat is a feed-forward model that achieves high-quality Gaussian reconstruction and view synthesis in just 0.6 seconds.
Looking forward to great conversations at the conference!
DepthSplat is a feed-forward model that achieves high-quality Gaussian reconstruction and view synthesis in just 0.6 seconds.
Looking forward to great conversations at the conference!
🏠 Introducing DepthSplat: a framework that connects Gaussian splatting with single- and multi-view depth estimation. This enables robust depth modeling and high-quality view synthesis with state-of-the-art results on ScanNet, RealEstate10K, and DL3DV.
🔗 haofeixu.github.io/depthsplat/
🔗 haofeixu.github.io/depthsplat/
June 5, 2025 at 12:09 PM
Excited to present our #CVPR2025 paper DepthSplat next week!
DepthSplat is a feed-forward model that achieves high-quality Gaussian reconstruction and view synthesis in just 0.6 seconds.
Looking forward to great conversations at the conference!
DepthSplat is a feed-forward model that achieves high-quality Gaussian reconstruction and view synthesis in just 0.6 seconds.
Looking forward to great conversations at the conference!
Reposted by Haofei Xu

📣 Excited to share our #CVPR2025 Spotlight paper and my internship project @wayve: SimLingo.
A Vision-Language-Action (VLA) model that achieves state-of-the-art driving performance with language capabilities.
Code: github.com/RenzKa/simli...
Paper: arxiv.org/abs/2503.09594
A Vision-Language-Action (VLA) model that achieves state-of-the-art driving performance with language capabilities.
Code: github.com/RenzKa/simli...
Paper: arxiv.org/abs/2503.09594
May 8, 2025 at 3:25 PM
📣 Excited to share our #CVPR2025 Spotlight paper and my internship project @wayve: SimLingo.
A Vision-Language-Action (VLA) model that achieves state-of-the-art driving performance with language capabilities.
Code: github.com/RenzKa/simli...
Paper: arxiv.org/abs/2503.09594
A Vision-Language-Action (VLA) model that achieves state-of-the-art driving performance with language capabilities.
Code: github.com/RenzKa/simli...
Paper: arxiv.org/abs/2503.09594
Reposted by Haofei Xu

📢 New paper CVPR 25!
Can meshes capture fuzzy geometry? Volumetric Surfaces uses adaptive textured shells to model hair, fur without the splatting / volume overhead. It’s fast, looks great, and runs in real time even on budget phones.
🔗 autonomousvision.github.io/volsurfs/
📄 arxiv.org/pdf/2409.02482
Can meshes capture fuzzy geometry? Volumetric Surfaces uses adaptive textured shells to model hair, fur without the splatting / volume overhead. It’s fast, looks great, and runs in real time even on budget phones.
🔗 autonomousvision.github.io/volsurfs/
📄 arxiv.org/pdf/2409.02482
May 5, 2025 at 1:00 PM
📢 New paper CVPR 25!
Can meshes capture fuzzy geometry? Volumetric Surfaces uses adaptive textured shells to model hair, fur without the splatting / volume overhead. It’s fast, looks great, and runs in real time even on budget phones.
🔗 autonomousvision.github.io/volsurfs/
📄 arxiv.org/pdf/2409.02482
Can meshes capture fuzzy geometry? Volumetric Surfaces uses adaptive textured shells to model hair, fur without the splatting / volume overhead. It’s fast, looks great, and runs in real time even on budget phones.
🔗 autonomousvision.github.io/volsurfs/
📄 arxiv.org/pdf/2409.02482
Reposted by Haofei Xu

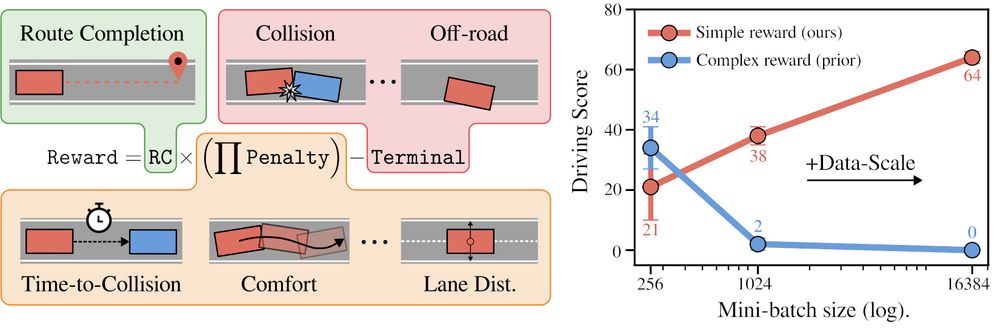
Introducing CaRL: Learning Scalable Planning Policies with Simple Rewards
We show how simple rewards enable scaling up PPO for planning.
CaRL outperforms all prior learning-based approaches on nuPlan Val14 and CARLA longest6 v2, using less inference compute.
arxiv.org/abs/2504.17838
We show how simple rewards enable scaling up PPO for planning.
CaRL outperforms all prior learning-based approaches on nuPlan Val14 and CARLA longest6 v2, using less inference compute.
arxiv.org/abs/2504.17838
April 28, 2025 at 3:17 PM
Introducing CaRL: Learning Scalable Planning Policies with Simple Rewards
We show how simple rewards enable scaling up PPO for planning.
CaRL outperforms all prior learning-based approaches on nuPlan Val14 and CARLA longest6 v2, using less inference compute.
arxiv.org/abs/2504.17838
We show how simple rewards enable scaling up PPO for planning.
CaRL outperforms all prior learning-based approaches on nuPlan Val14 and CARLA longest6 v2, using less inference compute.
arxiv.org/abs/2504.17838
Reposted by Haofei Xu
🏠 Introducing DepthSplat: a framework that connects Gaussian splatting with single- and multi-view depth estimation. This enables robust depth modeling and high-quality view synthesis with state-of-the-art results on ScanNet, RealEstate10K, and DL3DV.
🔗 haofeixu.github.io/depthsplat/
🔗 haofeixu.github.io/depthsplat/
April 24, 2025 at 8:58 AM
🏠 Introducing DepthSplat: a framework that connects Gaussian splatting with single- and multi-view depth estimation. This enables robust depth modeling and high-quality view synthesis with state-of-the-art results on ScanNet, RealEstate10K, and DL3DV.
🔗 haofeixu.github.io/depthsplat/
🔗 haofeixu.github.io/depthsplat/
Reposted by Haofei Xu
Personal programs for ICLR 25 @iclr-conf.bsky.social are now available at www.scholar-inbox.com. Enjoy!
Scholar Inbox
Scholar Inbox is a personal paper recommender which enables researchers to stay up-to-date with the most relevant progress in their field based on their personal research interests. Scholar Inbox is f...
www.scholar-inbox.com
April 23, 2025 at 9:07 PM
Personal programs for ICLR 25 @iclr-conf.bsky.social are now available at www.scholar-inbox.com. Enjoy!
Reposted by Haofei Xu

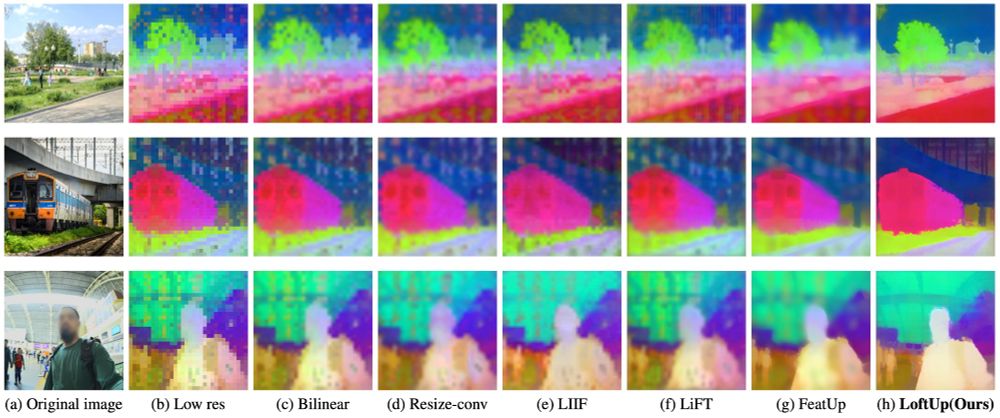
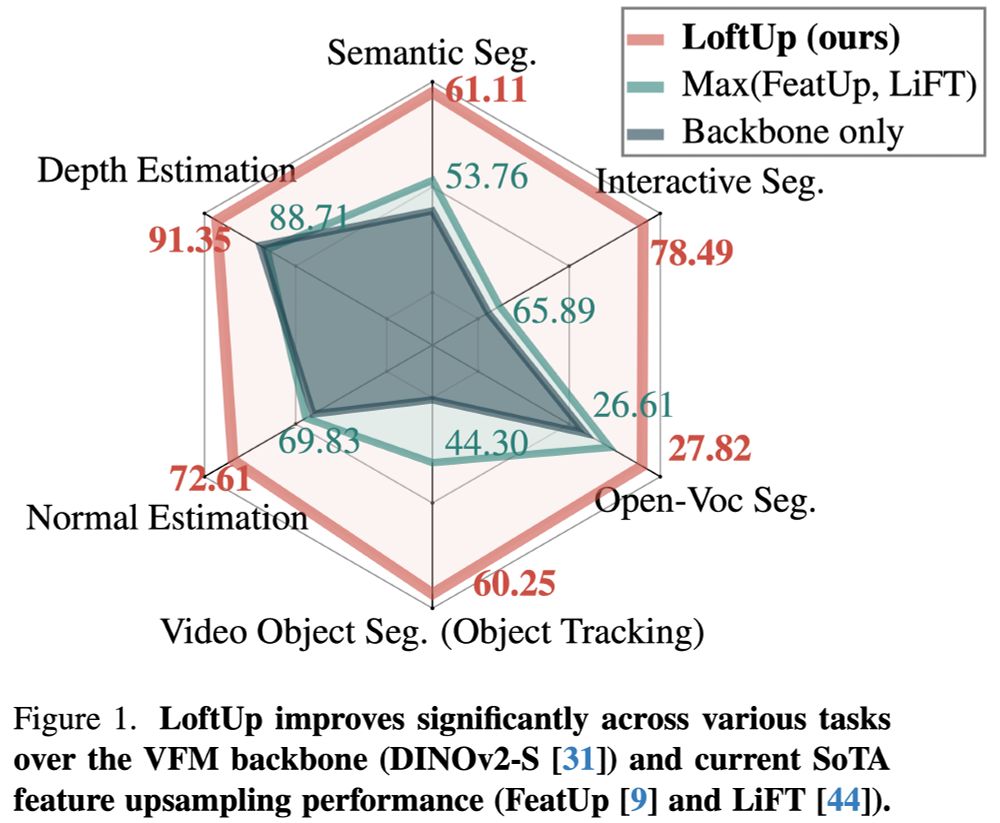
Excited to introduce LoftUp!
A strong (than ever) and lightweight feature upsampler for vision encoders that can boost performance on dense prediction tasks by 20%–100%!
Easy to plug into models like DINOv2, CLIP, SigLIP — simple design, big gains. Try it out!
github.com/andrehuang/l...
A strong (than ever) and lightweight feature upsampler for vision encoders that can boost performance on dense prediction tasks by 20%–100%!
Easy to plug into models like DINOv2, CLIP, SigLIP — simple design, big gains. Try it out!
github.com/andrehuang/l...
April 22, 2025 at 7:55 AM
Excited to introduce LoftUp!
A strong (than ever) and lightweight feature upsampler for vision encoders that can boost performance on dense prediction tasks by 20%–100%!
Easy to plug into models like DINOv2, CLIP, SigLIP — simple design, big gains. Try it out!
github.com/andrehuang/l...
A strong (than ever) and lightweight feature upsampler for vision encoders that can boost performance on dense prediction tasks by 20%–100%!
Easy to plug into models like DINOv2, CLIP, SigLIP — simple design, big gains. Try it out!
github.com/andrehuang/l...
Reposted by Haofei Xu
🐎 Centaur, our first foray into test-time training for end-to-end driving. No retraining needed, just plug-and-play at deployment given a trained model. Also, theoretically nearly no overhead in latency with some clever use of buffers. Surprising how effective this is! arxiv.org/abs/2503.11650

March 17, 2025 at 11:03 AM
🐎 Centaur, our first foray into test-time training for end-to-end driving. No retraining needed, just plug-and-play at deployment given a trained model. Also, theoretically nearly no overhead in latency with some clever use of buffers. Surprising how effective this is! arxiv.org/abs/2503.11650
Reposted by Haofei Xu
This week we had our winter retreat jointly with Daniel Cremer's group in Montafon, Austria. 46 talks, 100 Km of slopes and night sledding with some occasionally lost and found. It has been fun!




January 16, 2025 at 5:50 PM
This week we had our winter retreat jointly with Daniel Cremer's group in Montafon, Austria. 46 talks, 100 Km of slopes and night sledding with some occasionally lost and found. It has been fun!