




Mauro Comi
@maurok.bsky.social
Research Intern @GoogleDeepMind || PhD student in Machine Learning, 3D Computer Vision, and Robotics || https://maurocomi.com
Pinned
Mauro Comi
@maurok.bsky.social
· Feb 23
Grateful to be starting my second internship as a Student Researcher at Google DeepMind! I'm having a wonderful time at GDM and I'm excited to continue collaborating with such brilliant researchers 🥳
Grateful to be starting my second internship as a Student Researcher at Google DeepMind! I'm having a wonderful time at GDM and I'm excited to continue collaborating with such brilliant researchers 🥳
February 23, 2025 at 12:04 PM
Grateful to be starting my second internship as a Student Researcher at Google DeepMind! I'm having a wonderful time at GDM and I'm excited to continue collaborating with such brilliant researchers 🥳
Reposted by Mauro Comi
A new article appears! Finally I had the time to talk about gradient descent :) c0de517e.com/019_autoinig...
Learning to differentiably rasterize.
Angelo Pesce's homepage & blog on computers, graphics and other things.
c0de517e.com
February 11, 2025 at 7:50 PM
A new article appears! Finally I had the time to talk about gradient descent :) c0de517e.com/019_autoinig...
Amazing work as always!!

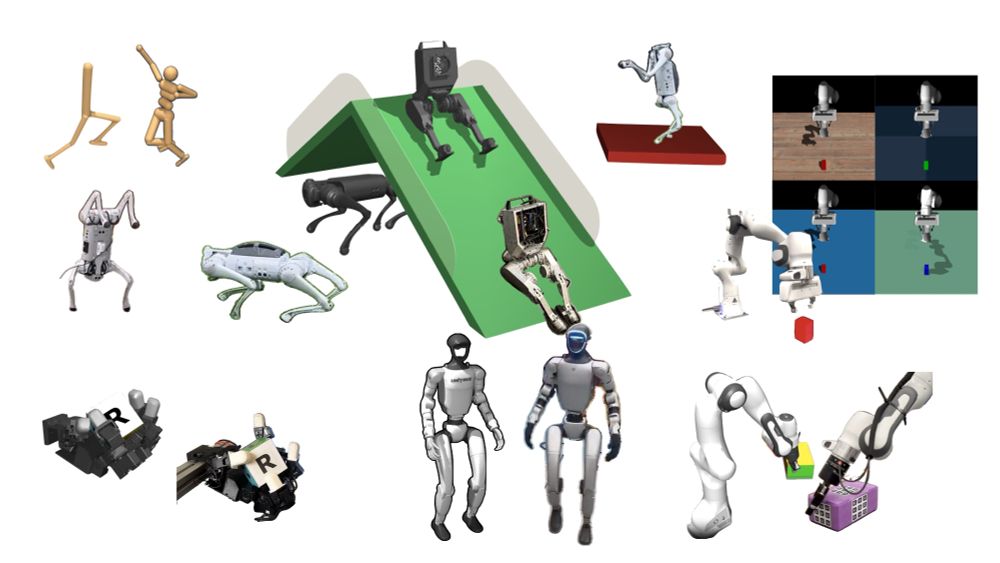
Introducing playground.mujoco.org
Combining MuJoCo’s rich and thriving ecosystem, massively parallel GPU-accelerated simulation, and real-world results across a diverse range of robot platforms: quadrupeds, humanoids, dexterous hands, and arms.
Get started today: pip install playground
Combining MuJoCo’s rich and thriving ecosystem, massively parallel GPU-accelerated simulation, and real-world results across a diverse range of robot platforms: quadrupeds, humanoids, dexterous hands, and arms.
Get started today: pip install playground
MuJoCo Playground
An open-source framework for GPU-accelerated robot learning and sim-to-real transfer
playground.mujoco.org
January 17, 2025 at 9:31 AM
Amazing work as always!!
Reposted by Mauro Comi
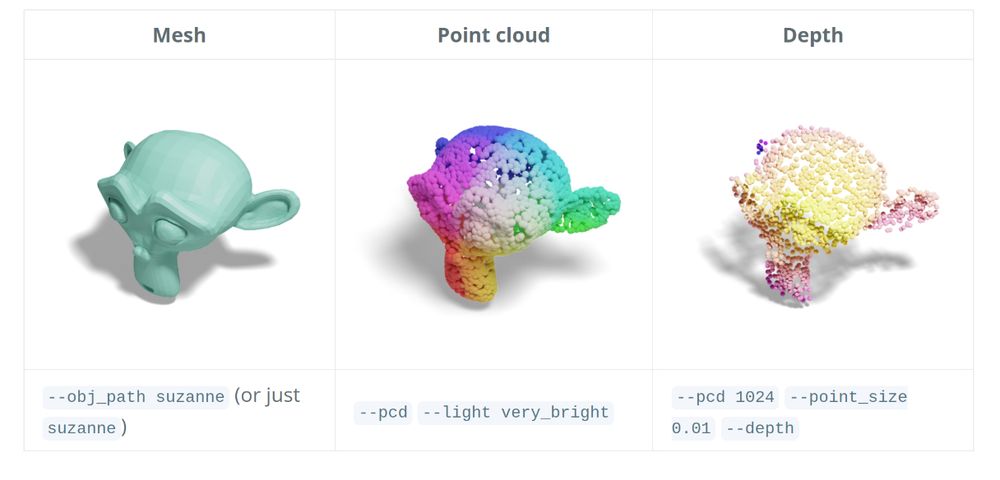
Publication-ready visualization of 3D objects and point clouds in seconds, using @blender.org and BlenderProc.
hummat.github.io/bproc-pubvis/
hummat.github.io/bproc-pubvis/
December 9, 2024 at 10:11 AM
Publication-ready visualization of 3D objects and point clouds in seconds, using @blender.org and BlenderProc.
hummat.github.io/bproc-pubvis/
hummat.github.io/bproc-pubvis/
Reposted by Mauro Comi

Just a heads up to everyone: @deep-mind.bsky.social is unfortunately a fake account and has been reported. Please do not follow it nor repost anything from it.
November 25, 2024 at 11:24 PM
Just a heads up to everyone: @deep-mind.bsky.social is unfortunately a fake account and has been reported. Please do not follow it nor repost anything from it.
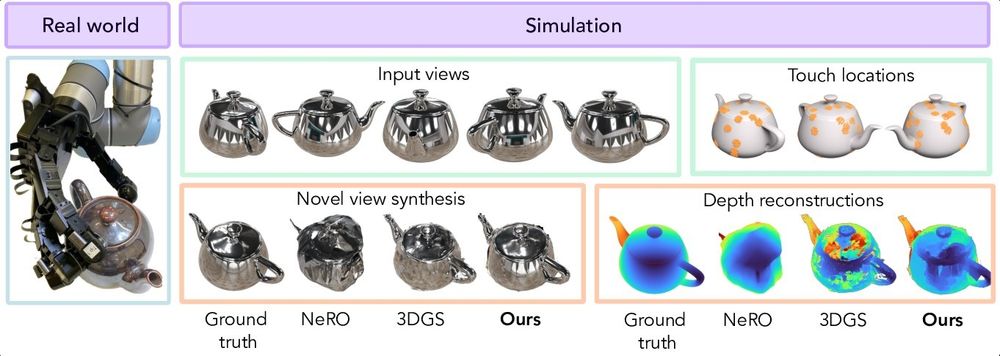
🥳📜 Our paper "Snap-it, Tap-it, Splat-it" was accepted at #3DV2025! We reconstruct objects in sim & real using vision, tactile sensing, and 3D Gaussian Splatting. If you're interested in 3D reconstruction in the real world, give it a look!
arxiv.org/abs/2403.20275
arxiv.org/abs/2403.20275
November 19, 2024 at 6:57 PM
🥳📜 Our paper "Snap-it, Tap-it, Splat-it" was accepted at #3DV2025! We reconstruct objects in sim & real using vision, tactile sensing, and 3D Gaussian Splatting. If you're interested in 3D reconstruction in the real world, give it a look!
arxiv.org/abs/2403.20275
arxiv.org/abs/2403.20275
Awesome, thanks!

Welcome to all new arrivals here on Bluesky! :) Here's a starter pack of people working on computer vision.
go.bsky.app/PkAKJu5
go.bsky.app/PkAKJu5
November 18, 2024 at 2:42 PM
Awesome, thanks!
Personal update! I've recently started my internship at @GoogleDeepMind as a PhD Student Researcher. Feeling incredibly grateful and excited to meet and work alongside such amazing people! 😊 🎉
November 16, 2024 at 8:53 AM
Personal update! I've recently started my internship at @GoogleDeepMind as a PhD Student Researcher. Feeling incredibly grateful and excited to meet and work alongside such amazing people! 😊 🎉