



Linus Härenstam-Nielsen
@linushn.bsky.social
PhD student at TU Munich
Working on 3D reconstruction, optimization theory and such things
website: linusnie.github.io/
github: github.com/Linusnie
scholar: scholar.google.com/citations?user=HWAA
Working on 3D reconstruction, optimization theory and such things
website: linusnie.github.io/
github: github.com/Linusnie
scholar: scholar.google.com/citations?user=HWAA
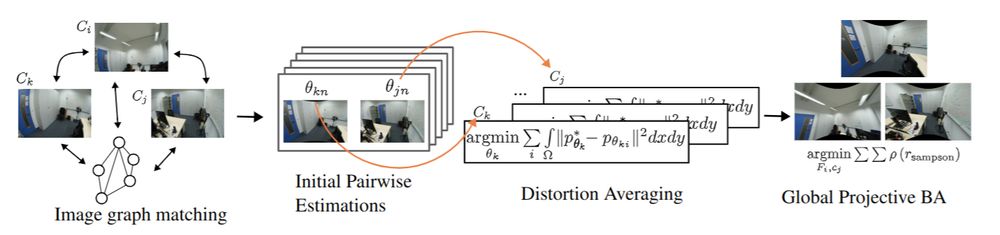
The code for our #CVPR2025 paper, PRaDA: Projective Radial Distortion Averaging, is now out!
Turns out distortion calibration from multiview 2D correspondences can be fully decoupled from 3D reconstruction, greatly simplifying the problem
arxiv.org/abs/2504.16499
github.com/DaniilSinits...
Turns out distortion calibration from multiview 2D correspondences can be fully decoupled from 3D reconstruction, greatly simplifying the problem
arxiv.org/abs/2504.16499
github.com/DaniilSinits...
July 9, 2025 at 1:54 PM
The code for our #CVPR2025 paper, PRaDA: Projective Radial Distortion Averaging, is now out!
Turns out distortion calibration from multiview 2D correspondences can be fully decoupled from 3D reconstruction, greatly simplifying the problem
arxiv.org/abs/2504.16499
github.com/DaniilSinits...
Turns out distortion calibration from multiview 2D correspondences can be fully decoupled from 3D reconstruction, greatly simplifying the problem
arxiv.org/abs/2504.16499
github.com/DaniilSinits...
consider me nerd-sniped 😅 one benefit I can see for the reprojection error is that it gives a better tradeoff when cameras are at different distances.
Here's a 3-view example:
blue=GT point
red=optimal projection error
green=optimal point-to-ray distance
all views have the same observation noise
Here's a 3-view example:
blue=GT point
red=optimal projection error
green=optimal point-to-ray distance
all views have the same observation noise

February 21, 2025 at 6:24 PM
consider me nerd-sniped 😅 one benefit I can see for the reprojection error is that it gives a better tradeoff when cameras are at different distances.
Here's a 3-view example:
blue=GT point
red=optimal projection error
green=optimal point-to-ray distance
all views have the same observation noise
Here's a 3-view example:
blue=GT point
red=optimal projection error
green=optimal point-to-ray distance
all views have the same observation noise
DiffCD: A Symmetric Differentiable Chamfer Distance for Neural Implicit Surface Fitting, presented at #ECCV2024
Paper: arxiv.org/abs/2407.17058
Code/project: github.com/linusnie/dif...
Paper: arxiv.org/abs/2407.17058
Code/project: github.com/linusnie/dif...

January 8, 2025 at 12:30 PM
DiffCD: A Symmetric Differentiable Chamfer Distance for Neural Implicit Surface Fitting, presented at #ECCV2024
Paper: arxiv.org/abs/2407.17058
Code/project: github.com/linusnie/dif...
Paper: arxiv.org/abs/2407.17058
Code/project: github.com/linusnie/dif...
Reposting some of my prior works here on this site :) "Semidefinite Relaxations for Robust Multiview Triangulation" at #CVPR2023!
paper: arxiv.org/abs/2301.11431
code: github.com/Linusnie/rob...
paper: arxiv.org/abs/2301.11431
code: github.com/Linusnie/rob...


January 8, 2025 at 12:29 PM
Reposting some of my prior works here on this site :) "Semidefinite Relaxations for Robust Multiview Triangulation" at #CVPR2023!
paper: arxiv.org/abs/2301.11431
code: github.com/Linusnie/rob...
paper: arxiv.org/abs/2301.11431
code: github.com/Linusnie/rob...