



Christian Gumbsch
@cgumbsch.bsky.social
Postdoc @ University of Amsterdam | world models and sensorimotor abstractions for RL and cognitive modeling |👾🤖🧠
https://cgumbsch.github.io
https://cgumbsch.github.io
Reposted by Christian Gumbsch

🎉 New work: “Learning Massively Multitask World Models for Continuous Control”
We introduce MMBench: a 200-task RL benchmark, and Newt: a language-conditioned multitask world model trained with large-scale online RL.
www.nicklashansen.com/NewtWM/
Code, checkpoints, dataset etc. are open-source!
We introduce MMBench: a 200-task RL benchmark, and Newt: a language-conditioned multitask world model trained with large-scale online RL.
www.nicklashansen.com/NewtWM/
Code, checkpoints, dataset etc. are open-source!
November 25, 2025 at 7:47 PM
🎉 New work: “Learning Massively Multitask World Models for Continuous Control”
We introduce MMBench: a 200-task RL benchmark, and Newt: a language-conditioned multitask world model trained with large-scale online RL.
www.nicklashansen.com/NewtWM/
Code, checkpoints, dataset etc. are open-source!
We introduce MMBench: a 200-task RL benchmark, and Newt: a language-conditioned multitask world model trained with large-scale online RL.
www.nicklashansen.com/NewtWM/
Code, checkpoints, dataset etc. are open-source!
Reposted by Christian Gumbsch

Introducing DINOv3 🦕🦕🦕
A SotA-enabling vision foundation model, trained with pure self-supervised learning (SSL) at scale.
High quality dense features, combining unprecedented semantic and geometric scene understanding.
Three reasons why this matters👇
A SotA-enabling vision foundation model, trained with pure self-supervised learning (SSL) at scale.
High quality dense features, combining unprecedented semantic and geometric scene understanding.
Three reasons why this matters👇

August 14, 2025 at 6:52 PM
Introducing DINOv3 🦕🦕🦕
A SotA-enabling vision foundation model, trained with pure self-supervised learning (SSL) at scale.
High quality dense features, combining unprecedented semantic and geometric scene understanding.
Three reasons why this matters👇
A SotA-enabling vision foundation model, trained with pure self-supervised learning (SSL) at scale.
High quality dense features, combining unprecedented semantic and geometric scene understanding.
Three reasons why this matters👇
Reposted by Christian Gumbsch

Are you working on real-to-sim, sim-to-real, learning world models, or using physics based simulators to do interesting robotics tasks? There are 15 days to the submission deadline for our CoRL workshop Learning to Simulate Robot Worlds. More details here simulatingrobotworlds.github.io/submit.html

Learning to Simulate Robot Worlds
simulatingrobotworlds.github.io
August 4, 2025 at 4:48 AM
Are you working on real-to-sim, sim-to-real, learning world models, or using physics based simulators to do interesting robotics tasks? There are 15 days to the submission deadline for our CoRL workshop Learning to Simulate Robot Worlds. More details here simulatingrobotworlds.github.io/submit.html
Reposted by Christian Gumbsch
🚀 We’re pleased to announce our workshop at CoRL 2025: Learning to Simulate Robot Worlds! Workshop website: simulatingrobotworlds.github.io
The workshop aims to cover topics like physics-grounded simulation, photorealistic digital twins, AI-controlled simulators, to learned neural world models.
The workshop aims to cover topics like physics-grounded simulation, photorealistic digital twins, AI-controlled simulators, to learned neural world models.
Learning to Simulate Robot Worlds
Join the Learning to Simulate Robot Worlds workshop.
simulatingrobotworlds.github.io
August 1, 2025 at 6:11 PM
🚀 We’re pleased to announce our workshop at CoRL 2025: Learning to Simulate Robot Worlds! Workshop website: simulatingrobotworlds.github.io
The workshop aims to cover topics like physics-grounded simulation, photorealistic digital twins, AI-controlled simulators, to learned neural world models.
The workshop aims to cover topics like physics-grounded simulation, photorealistic digital twins, AI-controlled simulators, to learned neural world models.
Reposted by Christian Gumbsch
SCMs often assume overly-dense causal graphs in dynamic settings 👉⚽🥎, since any object interaction is a potential causal edge, making them hard to scale. In joint work with @turanorujlu.bsky.social @cgumbsch.bsky.social & Martin Butz we propose a new Causal Process Model to tackle this.
Thread👇
Thread👇
July 24, 2025 at 4:26 PM
SCMs often assume overly-dense causal graphs in dynamic settings 👉⚽🥎, since any object interaction is a potential causal edge, making them hard to scale. In joint work with @turanorujlu.bsky.social @cgumbsch.bsky.social & Martin Butz we propose a new Causal Process Model to tackle this.
Thread👇
Thread👇
Reposted by Christian Gumbsch

Sergey Levine was just presenting in the Exploration in AI @ #ICML2025 and promoted that exploration needs to be grounded, and that VLMs are a good source ;-) Check our paper below
👇
👇

July 19, 2025 at 5:47 PM
Sergey Levine was just presenting in the Exploration in AI @ #ICML2025 and promoted that exploration needs to be grounded, and that VLMs are a good source ;-) Check our paper below
👇
👇
Reposted by Christian Gumbsch
I am going to present the poster during the next poster session. 11am Wed.
Poster W #707
Poster W #707
✨Introducing SENSEI✨ We bring semantically meaningful exploration to model-based RL using VLMs.
With intrinsic rewards for novel yet useful behaviors, SENSEI showcases strong exploration in MiniHack, Pokémon Red & Robodesk.
Accepted at ICML 2025🎉
Joint work with @cgumbsch.bsky.social
🧵
With intrinsic rewards for novel yet useful behaviors, SENSEI showcases strong exploration in MiniHack, Pokémon Red & Robodesk.
Accepted at ICML 2025🎉
Joint work with @cgumbsch.bsky.social
🧵
July 16, 2025 at 4:00 PM
I am going to present the poster during the next poster session. 11am Wed.
Poster W #707
Poster W #707
Reposted by Christian Gumbsch
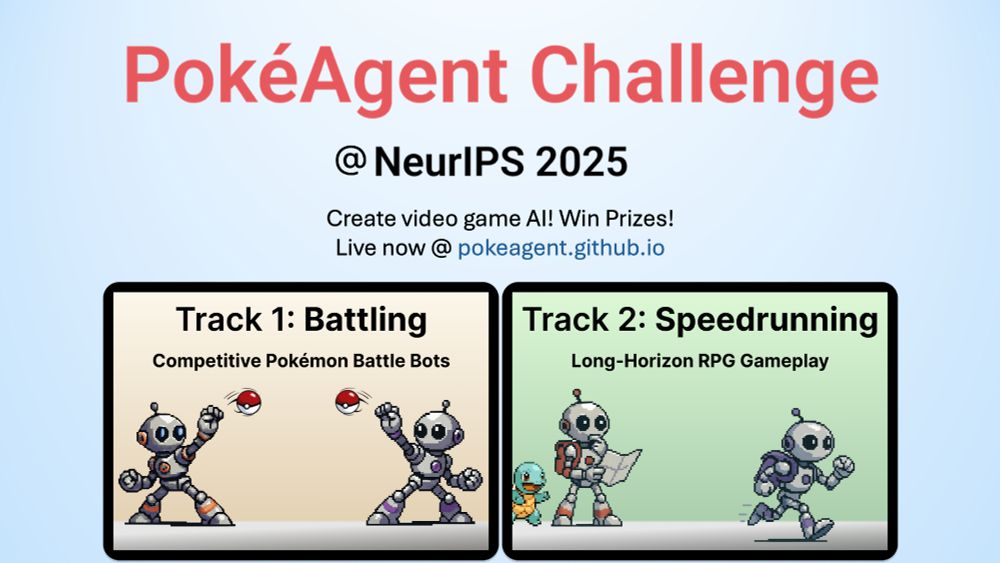
🚀 Launch day! The NeurIPS 2025 PokéAgent Challenge is live. @neuripsconf.bsky.social
Two tracks:
① Showdown Battling – imperfect-info, turn-based strategy
② Pokemon Emerald Speedrunning – long horizon RPG planning
5 M labeled replays • starter kit • baselines.
Bring your LLM, RL, or hybrid agent!
Two tracks:
① Showdown Battling – imperfect-info, turn-based strategy
② Pokemon Emerald Speedrunning – long horizon RPG planning
5 M labeled replays • starter kit • baselines.
Bring your LLM, RL, or hybrid agent!
July 14, 2025 at 4:33 PM
🚀 Launch day! The NeurIPS 2025 PokéAgent Challenge is live. @neuripsconf.bsky.social
Two tracks:
① Showdown Battling – imperfect-info, turn-based strategy
② Pokemon Emerald Speedrunning – long horizon RPG planning
5 M labeled replays • starter kit • baselines.
Bring your LLM, RL, or hybrid agent!
Two tracks:
① Showdown Battling – imperfect-info, turn-based strategy
② Pokemon Emerald Speedrunning – long horizon RPG planning
5 M labeled replays • starter kit • baselines.
Bring your LLM, RL, or hybrid agent!
Reposted by Christian Gumbsch

✨Introducing SENSEI✨ We bring semantically meaningful exploration to model-based RL using VLMs.
With intrinsic rewards for novel yet useful behaviors, SENSEI showcases strong exploration in MiniHack, Pokémon Red & Robodesk.
Accepted at ICML 2025🎉
Joint work with @cgumbsch.bsky.social
🧵
With intrinsic rewards for novel yet useful behaviors, SENSEI showcases strong exploration in MiniHack, Pokémon Red & Robodesk.
Accepted at ICML 2025🎉
Joint work with @cgumbsch.bsky.social
🧵
July 14, 2025 at 8:02 AM
✨Introducing SENSEI✨ We bring semantically meaningful exploration to model-based RL using VLMs.
With intrinsic rewards for novel yet useful behaviors, SENSEI showcases strong exploration in MiniHack, Pokémon Red & Robodesk.
Accepted at ICML 2025🎉
Joint work with @cgumbsch.bsky.social
🧵
With intrinsic rewards for novel yet useful behaviors, SENSEI showcases strong exploration in MiniHack, Pokémon Red & Robodesk.
Accepted at ICML 2025🎉
Joint work with @cgumbsch.bsky.social
🧵
Reposted by Christian Gumbsch

Mark your calendars, EWRL is coming to Tübingen! 📅
When? September 17-19, 2025.
More news to come soon, stay tuned!
When? September 17-19, 2025.
More news to come soon, stay tuned!

April 8, 2025 at 8:33 AM
Mark your calendars, EWRL is coming to Tübingen! 📅
When? September 17-19, 2025.
More news to come soon, stay tuned!
When? September 17-19, 2025.
More news to come soon, stay tuned!