


Bhamla Lab @ Georgia Tech
@bhamlalab.bsky.social
Curiosity driven science in physics of life and frugal innovations for planetary scale challenges
https://bhamla.gatech.edu/
https://bhamla.gatech.edu/
Featured on the cover of science

August 23, 2025 at 9:16 PM
Featured on the cover of science
You can also read our comic in Spanish and Korean!




August 23, 2025 at 8:37 PM
You can also read our comic in Spanish and Korean!
Check out our comic illustrated by
@jordancollver.bsky.social and @rikworth.bsky.social , colors by @owenwattsdraws.bsky.social .
-- find the full comic and more here
bhamla.gatech.edu/project-blog...
@jordancollver.bsky.social and @rikworth.bsky.social , colors by @owenwattsdraws.bsky.social .
-- find the full comic and more here
bhamla.gatech.edu/project-blog...

August 23, 2025 at 8:37 PM
Check out our comic illustrated by
@jordancollver.bsky.social and @rikworth.bsky.social , colors by @owenwattsdraws.bsky.social .
-- find the full comic and more here
bhamla.gatech.edu/project-blog...
@jordancollver.bsky.social and @rikworth.bsky.social , colors by @owenwattsdraws.bsky.social .
-- find the full comic and more here
bhamla.gatech.edu/project-blog...
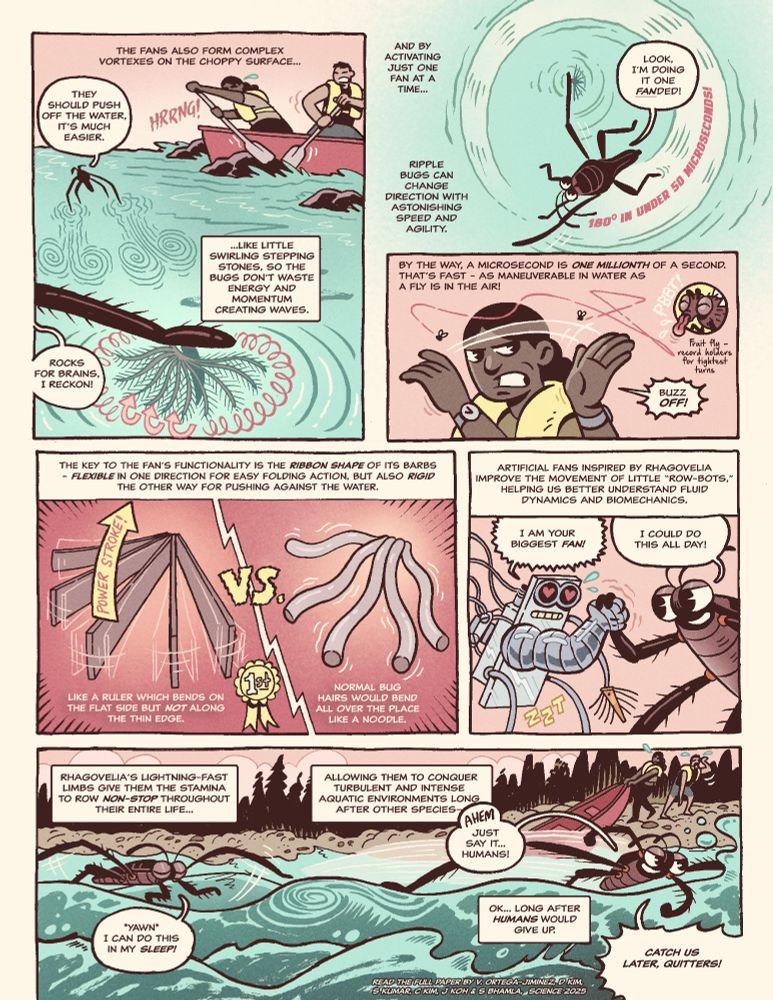
Ripple bugs embody interfacial intelligence - structures that use the air–water interface itself as a source of power. By borrowing this idea, tiny robots can move with agility and efficiency in turbulent waters.

August 23, 2025 at 8:37 PM
Ripple bugs embody interfacial intelligence - structures that use the air–water interface itself as a source of power. By borrowing this idea, tiny robots can move with agility and efficiency in turbulent waters.
Inspired by nature, we built the Rhagobot: a tiny robot with self-morphing fans that copy this trick. Just 1 mg each, the fans open + close with water, boosting thrust, efficiency, and maneuverability.

August 23, 2025 at 8:37 PM
Inspired by nature, we built the Rhagobot: a tiny robot with self-morphing fans that copy this trick. Just 1 mg each, the fans open + close with water, boosting thrust, efficiency, and maneuverability.
Second, we found that this passive fan design gives ripple bugs extreme agility, lightning-fast sprints, sharp braking, and full-body turns of ~96° in just 50 milliseconds.This design gives ripple bugs super agility: ⚡️


August 23, 2025 at 8:37 PM
Second, we found that this passive fan design gives ripple bugs extreme agility, lightning-fast sprints, sharp braking, and full-body turns of ~96° in just 50 milliseconds.This design gives ripple bugs super agility: ⚡️
First, we discovered that ripple bugs have collapsible fans on their middle legs. These fans open automatically in water and fold back when lifted - no muscles needed. Just surface tension + smart geometry.
#Science #Bioinspired #Robotics #Rhaogovelia #RippleBugs
#Science #Bioinspired #Robotics #Rhaogovelia #RippleBugs


August 23, 2025 at 8:37 PM
First, we discovered that ripple bugs have collapsible fans on their middle legs. These fans open automatically in water and fold back when lifted - no muscles needed. Just surface tension + smart geometry.
#Science #Bioinspired #Robotics #Rhaogovelia #RippleBugs
#Science #Bioinspired #Robotics #Rhaogovelia #RippleBugs
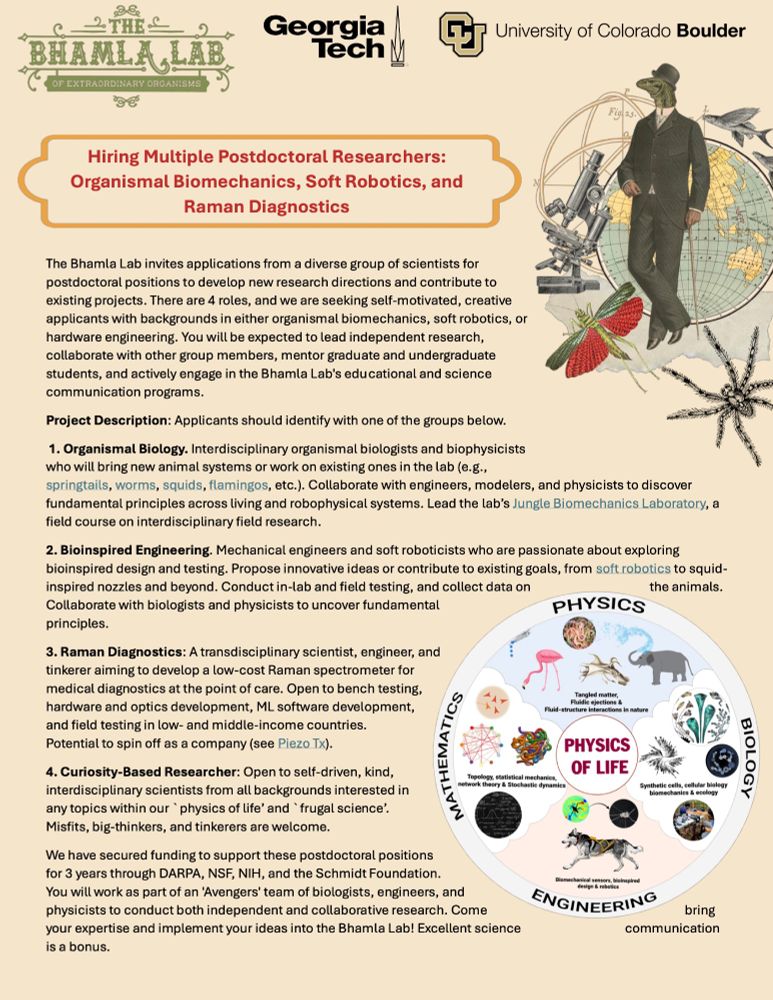
Hiring 4 postdocs — organismal biophysics, soft robotics, frugal Raman diagnostics, or your own bold idea.
3-year funding, $65K+ benefits. GT (Atlanta) now → CU Boulder BioFrontiers Institute in Fall ’26.
PDF/details in next post. Tag/share if someone comes to mind. 🧪🪲🪳#livingphysics
3-year funding, $65K+ benefits. GT (Atlanta) now → CU Boulder BioFrontiers Institute in Fall ’26.
PDF/details in next post. Tag/share if someone comes to mind. 🧪🪲🪳#livingphysics
July 30, 2025 at 12:42 PM
Hiring 4 postdocs — organismal biophysics, soft robotics, frugal Raman diagnostics, or your own bold idea.
3-year funding, $65K+ benefits. GT (Atlanta) now → CU Boulder BioFrontiers Institute in Fall ’26.
PDF/details in next post. Tag/share if someone comes to mind. 🧪🪲🪳#livingphysics
3-year funding, $65K+ benefits. GT (Atlanta) now → CU Boulder BioFrontiers Institute in Fall ’26.
PDF/details in next post. Tag/share if someone comes to mind. 🧪🪲🪳#livingphysics
Third cohort of our Jungle Biomechanics Lab (JBL) just hit the Amazon. Physicists, biologists, and engineers in the field, chasing questions for no other reason than curiosity. It’s the most fulfilling thing I do as a scientist - enabling others to find their joy in science.

July 28, 2025 at 12:34 PM
Third cohort of our Jungle Biomechanics Lab (JBL) just hit the Amazon. Physicists, biologists, and engineers in the field, chasing questions for no other reason than curiosity. It’s the most fulfilling thing I do as a scientist - enabling others to find their joy in science.
Check out this first page of our comic illustrated by @matteofarinella.bsky.social -- find the full comic and more here bhamla.gatech.edu/comics

May 13, 2025 at 9:06 PM
Check out this first page of our comic illustrated by @matteofarinella.bsky.social -- find the full comic and more here bhamla.gatech.edu/comics
Second, by using flexible and rigid flamingo foot models, we discovered that feet stomping produces strong horizontal vortices, reinvigorated with each step, effectively trapping small and fast prey. The asymmetry in toe and web morphology pushes the vortices to where the beak filter feeds.

May 13, 2025 at 8:53 PM
Second, by using flexible and rigid flamingo foot models, we discovered that feet stomping produces strong horizontal vortices, reinvigorated with each step, effectively trapping small and fast prey. The asymmetry in toe and web morphology pushes the vortices to where the beak filter feeds.
First, we found that flamingo bobbing, happening at ~400 ms, produces strong tornado-like vortices, stirring particles at the bottom and upwelling them towards the surface. The bent shape of the bill upside down presents a flat surface primed for vortical interaction.

May 13, 2025 at 8:53 PM
First, we found that flamingo bobbing, happening at ~400 ms, produces strong tornado-like vortices, stirring particles at the bottom and upwelling them towards the surface. The bent shape of the bill upside down presents a flat surface primed for vortical interaction.
This work is the result of the hard work of an amazing team of researchers, especially @chemicalsunnyraj.bsky.social @itiwari93.bsky.social and Victor Ortega-Jimenez, who co-led this work and brought it to the finish line. #ScienceRoboticsResearch
scim.ag/4iDIa1i
scim.ag/4iDIa1i

April 24, 2025 at 4:29 AM
This work is the result of the hard work of an amazing team of researchers, especially @chemicalsunnyraj.bsky.social @itiwari93.bsky.social and Victor Ortega-Jimenez, who co-led this work and brought it to the finish line. #ScienceRoboticsResearch
scim.ag/4iDIa1i
scim.ag/4iDIa1i
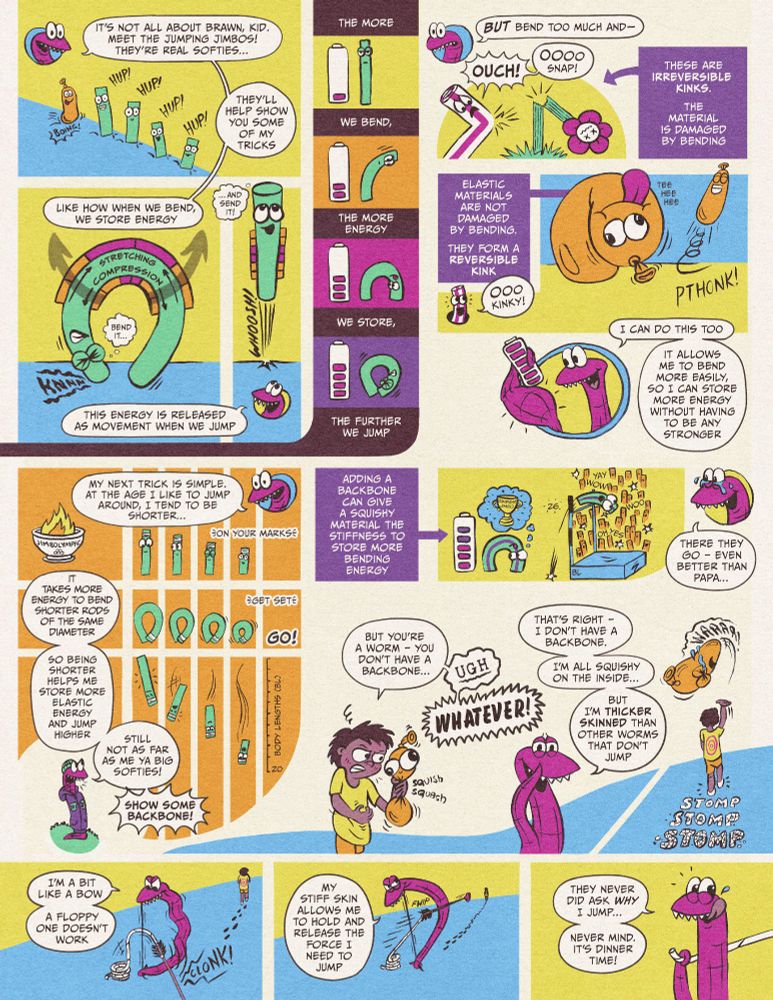
Page 2 of the comic. Find more about this research and more comics from the Bhamla lab here bhamla.gatech.edu/s/Unofficial...
April 24, 2025 at 4:29 AM
Page 2 of the comic. Find more about this research and more comics from the Bhamla lab here bhamla.gatech.edu/s/Unofficial...
For a fun, illustrated journey following this work's discoveries, check out our comic book on this project by the amazing Eliza Wolfson (lizawolfson.co.uk), it packs all the science into a playful adventure! Page 1/2

April 24, 2025 at 4:29 AM
For a fun, illustrated journey following this work's discoveries, check out our comic book on this project by the amazing Eliza Wolfson (lizawolfson.co.uk), it packs all the science into a playful adventure! Page 1/2
Learning from these principles, he then spliced carbon-fiber backbones into a soft silicone shell and observed takeoff velocities climb to 13 m/s and jump height to 25 body lengths (3 m)! Even a basketball rim can’t hold it back. 🏀🚀 #SoftRobotics
April 24, 2025 at 4:29 AM
Learning from these principles, he then spliced carbon-fiber backbones into a soft silicone shell and observed takeoff velocities climb to 13 m/s and jump height to 25 body lengths (3 m)! Even a basketball rim can’t hold it back. 🏀🚀 #SoftRobotics
Inspired, @chemicalsunnyraj.bsky.social built Soft Jumping models (SoftJM) prototypes that mimic this kink instability: reversible kinks boost elastic energy storage 4–5× under a force ceiling, giving stronger, faster jumps without blowing “muscles.” 🤖 #BioinspiredDesign
April 24, 2025 at 4:29 AM
Inspired, @chemicalsunnyraj.bsky.social built Soft Jumping models (SoftJM) prototypes that mimic this kink instability: reversible kinks boost elastic energy storage 4–5× under a force ceiling, giving stronger, faster jumps without blowing “muscles.” 🤖 #BioinspiredDesign
Zooming in, we saw that the worm bends its body so much that it can form a kink at the bend! Kinks are usually detrimental in structures. For example, Kinked straws are useless. But this nematode can reversibly kink its body and keep jumping!
April 24, 2025 at 4:29 AM
Zooming in, we saw that the worm bends its body so much that it can form a kink at the bend! Kinks are usually detrimental in structures. For example, Kinked straws are useless. But this nematode can reversibly kink its body and keep jumping!
What holds this tiny spring as it stores energy? A microscopic water bridge at the ventral-ventral contact acts as a liquid latch, balancing the bending force until the water bridge breaks. And then off it goes into the air!
April 24, 2025 at 4:29 AM
What holds this tiny spring as it stores energy? A microscopic water bridge at the ventral-ventral contact acts as a liquid latch, balancing the bending force until the water bridge breaks. And then off it goes into the air!
Using AFM, we discovered their cuticle is stiffer than C. elegans. That extra rigidity stores loads of energy in their body curvature when they bend into a shape that looks like the letter α, turning their bodies into tiny but mighty springs.

April 24, 2025 at 4:29 AM
Using AFM, we discovered their cuticle is stiffer than C. elegans. That extra rigidity stores loads of energy in their body curvature when they bend into a shape that looks like the letter α, turning their bodies into tiny but mighty springs.
Using Cosserat rod modelling, @itiwari93.bsky.social created a simulated worm that jumps not only by mimicking the shape of the worm, but also from a wide variety of initial postures that the worm does not make!
April 24, 2025 at 4:29 AM
Using Cosserat rod modelling, @itiwari93.bsky.social created a simulated worm that jumps not only by mimicking the shape of the worm, but also from a wide variety of initial postures that the worm does not make!
Looking at multitudes of jumps, we found that these worms can steer their jumps! By tweaking head (α) and loop (θ) angles, they bias their center of mass and can choose forward or backward takeoff.
April 24, 2025 at 4:29 AM
Looking at multitudes of jumps, we found that these worms can steer their jumps! By tweaking head (α) and loop (θ) angles, they bias their center of mass and can choose forward or backward takeoff.
Ever watched a legless worm launch itself 20 body lengths in just 150μs? This incredible high-speed video by Victor shows Steinernema carpocapsae curling into an α-loop, snapping open in μs, and soaring at ~1.5 m/s. We wanted to understand how it stored this energy & develop a robotic mechanism.
April 24, 2025 at 4:29 AM
Ever watched a legless worm launch itself 20 body lengths in just 150μs? This incredible high-speed video by Victor shows Steinernema carpocapsae curling into an α-loop, snapping open in μs, and soaring at ~1.5 m/s. We wanted to understand how it stored this energy & develop a robotic mechanism.
HIRING: Looking for lab manager to start before August, when our current lab manager leaves to begin their PhD!

April 10, 2025 at 4:19 PM
HIRING: Looking for lab manager to start before August, when our current lab manager leaves to begin their PhD!
Apply to Jungle Biomechanics Lab by this Saturday -- to see this view in Peru! And figure out why these bugs are on your screen! bhamla.gatech.edu/project-blog...

March 11, 2025 at 2:46 PM
Apply to Jungle Biomechanics Lab by this Saturday -- to see this view in Peru! And figure out why these bugs are on your screen! bhamla.gatech.edu/project-blog...