




Alfredo Canziani
@alfcnz.bsky.social
Musician, math lover, cook, dancer, 🏳️🌈, and an ass prof of Computer Science at New York University
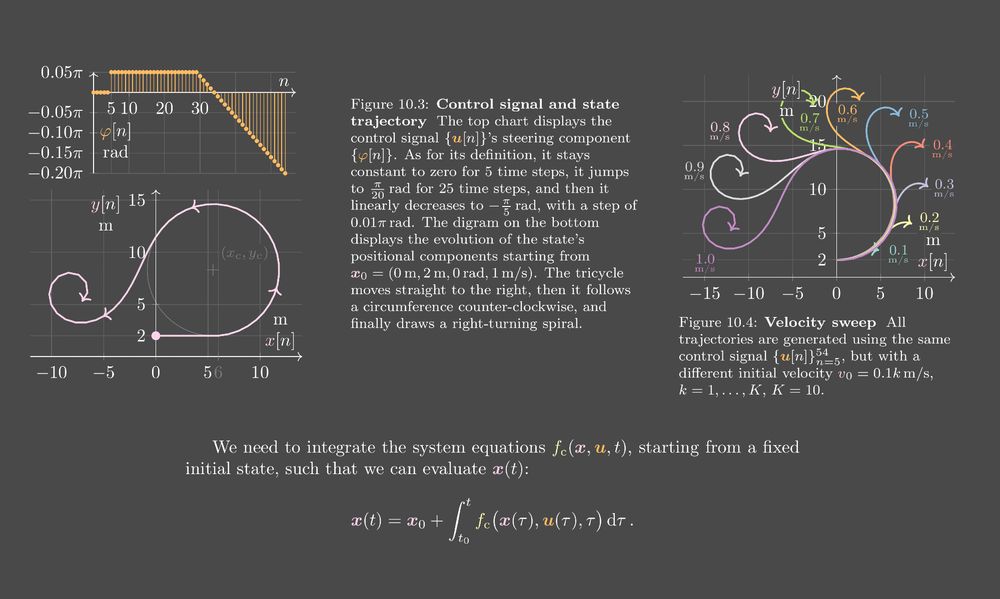
To compute the movement of the state x(t), we need to temporally integrate its velocity field ẋ(t). 🤓
The control signal steering angle stays at 0, then 0.05π, then linearly to −0.20π. The vehicle moves along circumferences.
Finally, a sweep of initial velocity is performed.
The control signal steering angle stays at 0, then 0.05π, then linearly to −0.20π. The vehicle moves along circumferences.
Finally, a sweep of initial velocity is performed.
July 2, 2025 at 3:17 PM
To compute the movement of the state x(t), we need to temporally integrate its velocity field ẋ(t). 🤓
The control signal steering angle stays at 0, then 0.05π, then linearly to −0.20π. The vehicle moves along circumferences.
Finally, a sweep of initial velocity is performed.
The control signal steering angle stays at 0, then 0.05π, then linearly to −0.20π. The vehicle moves along circumferences.
Finally, a sweep of initial velocity is performed.
Currently, writing chapter 10, «Planning and control».
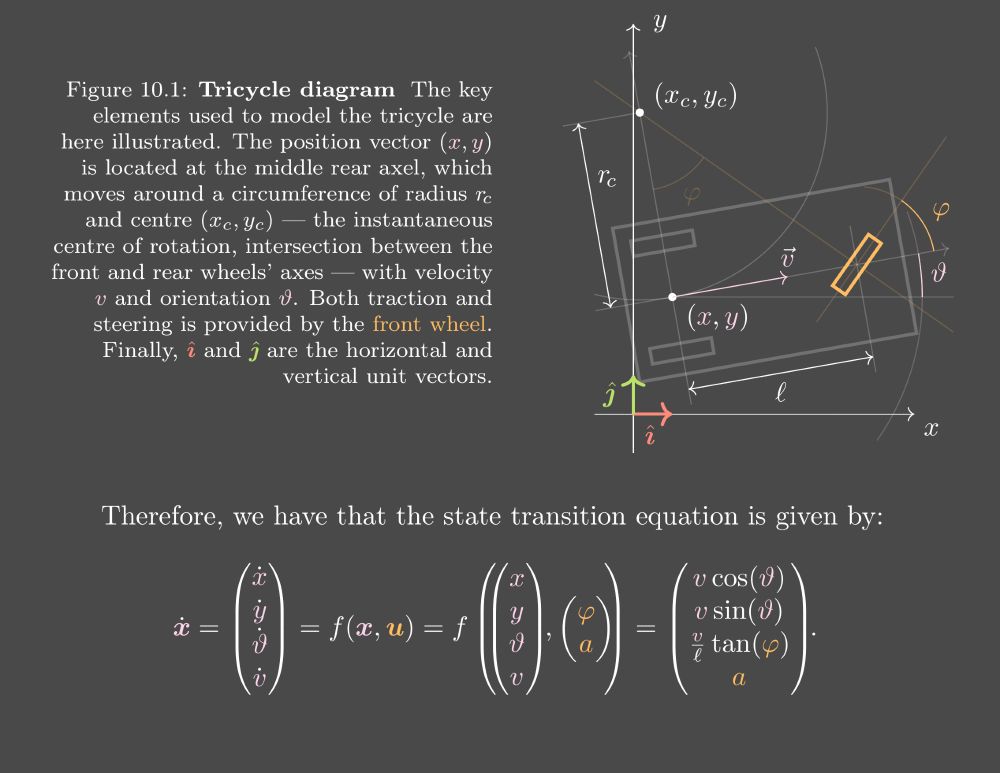
Physical constrains for the evolution of the state (e.g. pure rotation of the wheels) are encoded through the velocity of the state ẋ = dx(t)/dt, a function of the state x(t) and the control u(t).
Physical constrains for the evolution of the state (e.g. pure rotation of the wheels) are encoded through the velocity of the state ẋ = dx(t)/dt, a function of the state x(t) and the control u(t).
June 30, 2025 at 8:37 PM
Currently, writing chapter 10, «Planning and control».
Physical constrains for the evolution of the state (e.g. pure rotation of the wheels) are encoded through the velocity of the state ẋ = dx(t)/dt, a function of the state x(t) and the control u(t).
Physical constrains for the evolution of the state (e.g. pure rotation of the wheels) are encoded through the velocity of the state ẋ = dx(t)/dt, a function of the state x(t) and the control u(t).
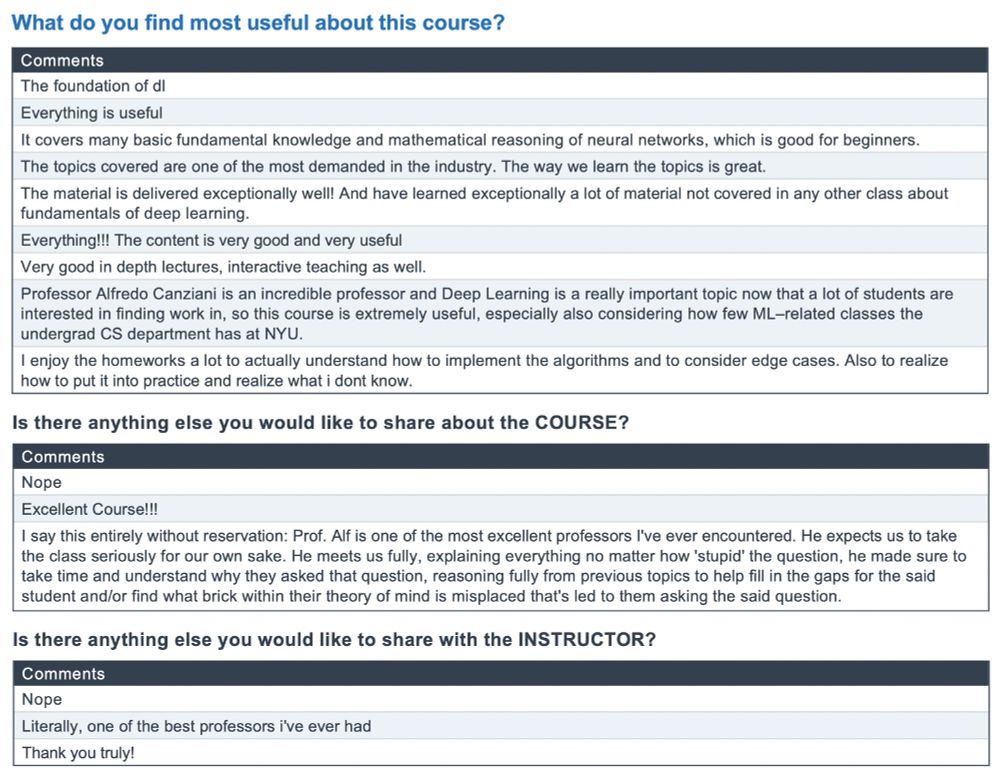
Oh! The undergrad feedback came in! 🥹🥹🥹
June 10, 2025 at 8:04 PM
Oh! The undergrad feedback came in! 🥹🥹🥹
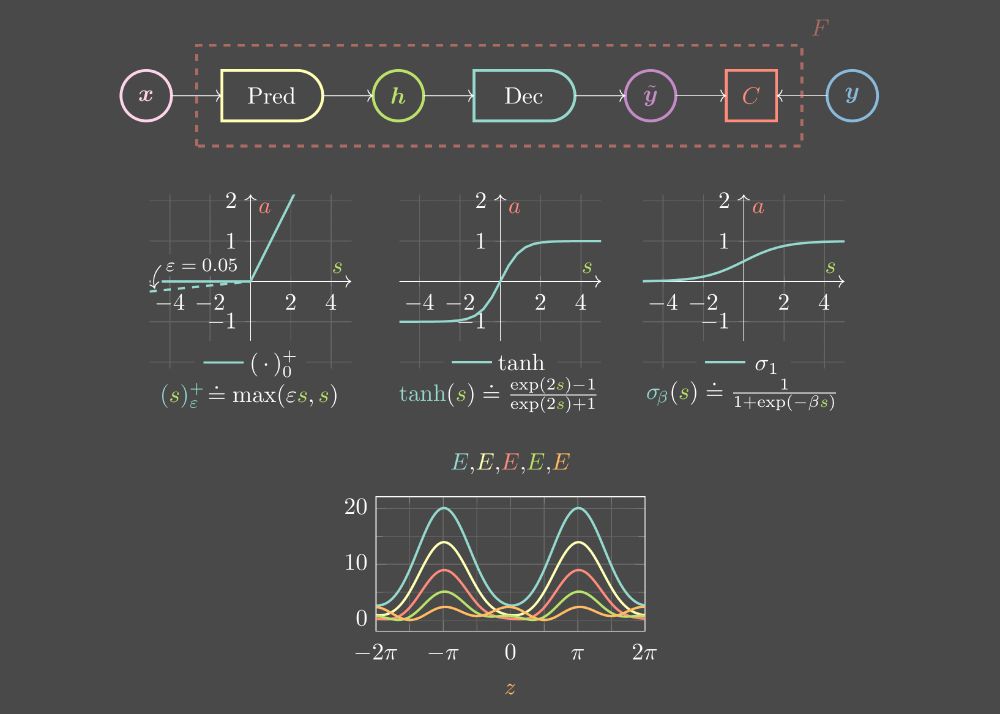
Releasing the Energy-Book 🔋 from its first appendix's chapter, where I explain how I create my figures. 🎨
Feel free to report errors via the issues' tracker, contribute to the exercises, and show me what you can draw, via the discussion section. 🥳
github.com/Atcold/Energ...
Feel free to report errors via the issues' tracker, contribute to the exercises, and show me what you can draw, via the discussion section. 🥳
github.com/Atcold/Energ...
June 9, 2025 at 8:56 PM
Releasing the Energy-Book 🔋 from its first appendix's chapter, where I explain how I create my figures. 🎨
Feel free to report errors via the issues' tracker, contribute to the exercises, and show me what you can draw, via the discussion section. 🥳
github.com/Atcold/Energ...
Feel free to report errors via the issues' tracker, contribute to the exercises, and show me what you can draw, via the discussion section. 🥳
github.com/Atcold/Energ...
Yeah, it took me 20 days to get back 🥹🥹🥹
I swear I respond to instant messages as they get through! 🥲🥲🥲
Anyhow, one more successful semester completed. 🥳🥳🥳
I swear I respond to instant messages as they get through! 🥲🥲🥲
Anyhow, one more successful semester completed. 🥳🥳🥳
May 29, 2025 at 6:34 PM
Yeah, it took me 20 days to get back 🥹🥹🥹
I swear I respond to instant messages as they get through! 🥲🥲🥲
Anyhow, one more successful semester completed. 🥳🥳🥳
I swear I respond to instant messages as they get through! 🥲🥲🥲
Anyhow, one more successful semester completed. 🥳🥳🥳
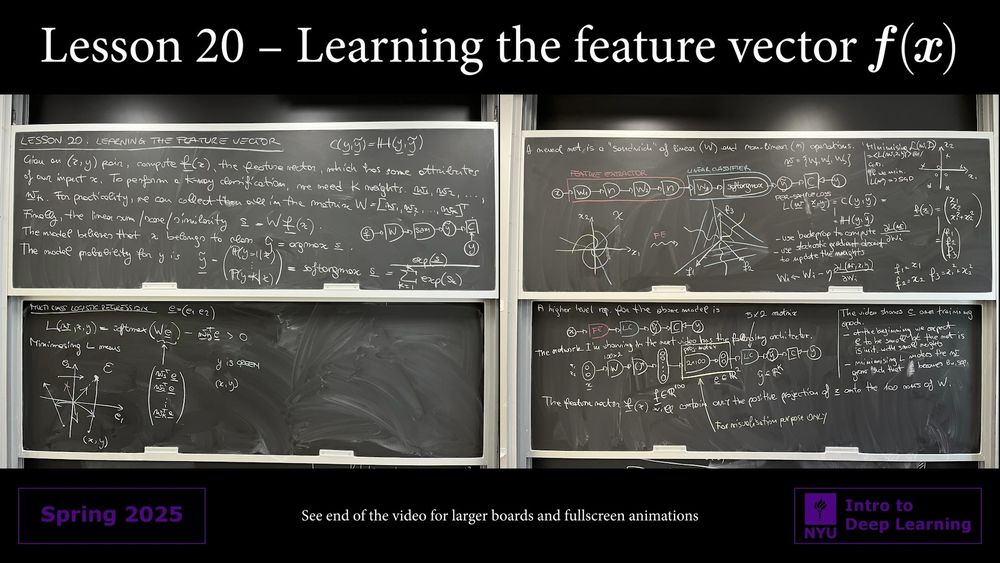
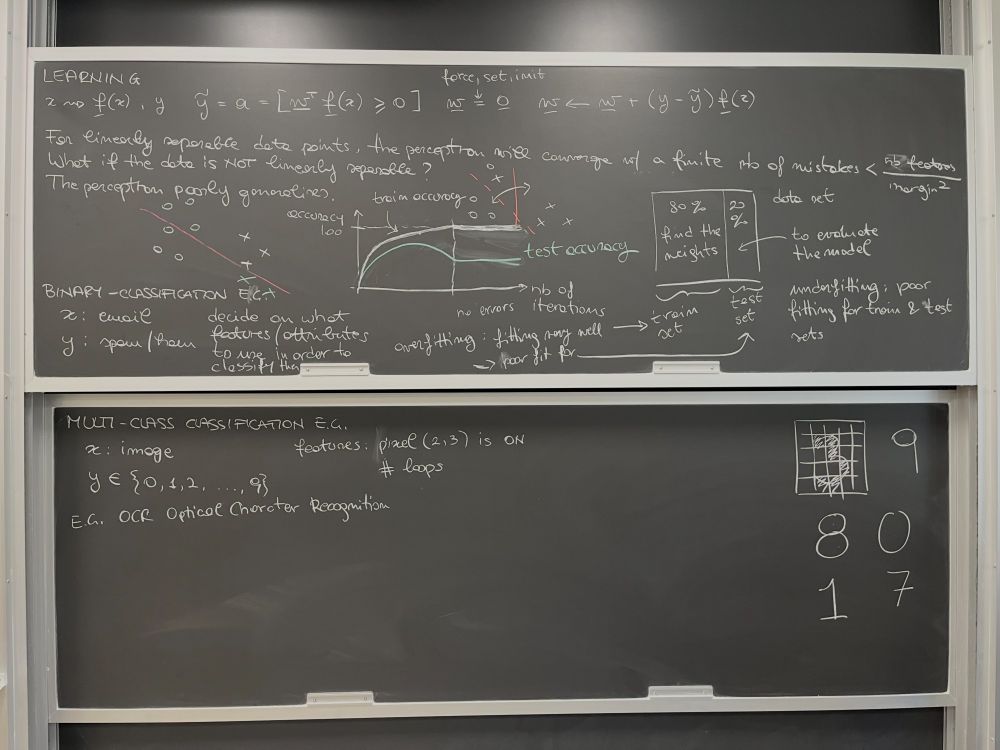
In this lecture from my new undergrad course, we review linear multiclass classification, leverage backprop and gradient descent to learn a linearly separable feature vector for the input, and observe the training dynamics in a 2D embedding space. 🤓
youtu.be/saskQ-EjCLQ
youtu.be/saskQ-EjCLQ
April 9, 2025 at 6:32 PM
In this lecture from my new undergrad course, we review linear multiclass classification, leverage backprop and gradient descent to learn a linearly separable feature vector for the input, and observe the training dynamics in a 2D embedding space. 🤓
youtu.be/saskQ-EjCLQ
youtu.be/saskQ-EjCLQ
This is different from the video I made 5 years ago, where the input-output linear interpolation of an already trained network shows what a neural net does to its input. Namely, it follows a piece-wise linear mapping defined by the hidden layer.
April 8, 2025 at 4:19 AM
This is different from the video I made 5 years ago, where the input-output linear interpolation of an already trained network shows what a neural net does to its input. Namely, it follows a piece-wise linear mapping defined by the hidden layer.
Training of a 2 → 100 → 2 → 5 fully connected ReLU neural net via cross-entropy minimisation.
• it starts outputting small embeddings
• around epoch 300 learns an identity function
• takes 1700 epochs more to unwind the data manifold
• it starts outputting small embeddings
• around epoch 300 learns an identity function
• takes 1700 epochs more to unwind the data manifold
April 8, 2025 at 4:19 AM
Training of a 2 → 100 → 2 → 5 fully connected ReLU neural net via cross-entropy minimisation.
• it starts outputting small embeddings
• around epoch 300 learns an identity function
• takes 1700 epochs more to unwind the data manifold
• it starts outputting small embeddings
• around epoch 300 learns an identity function
• takes 1700 epochs more to unwind the data manifold
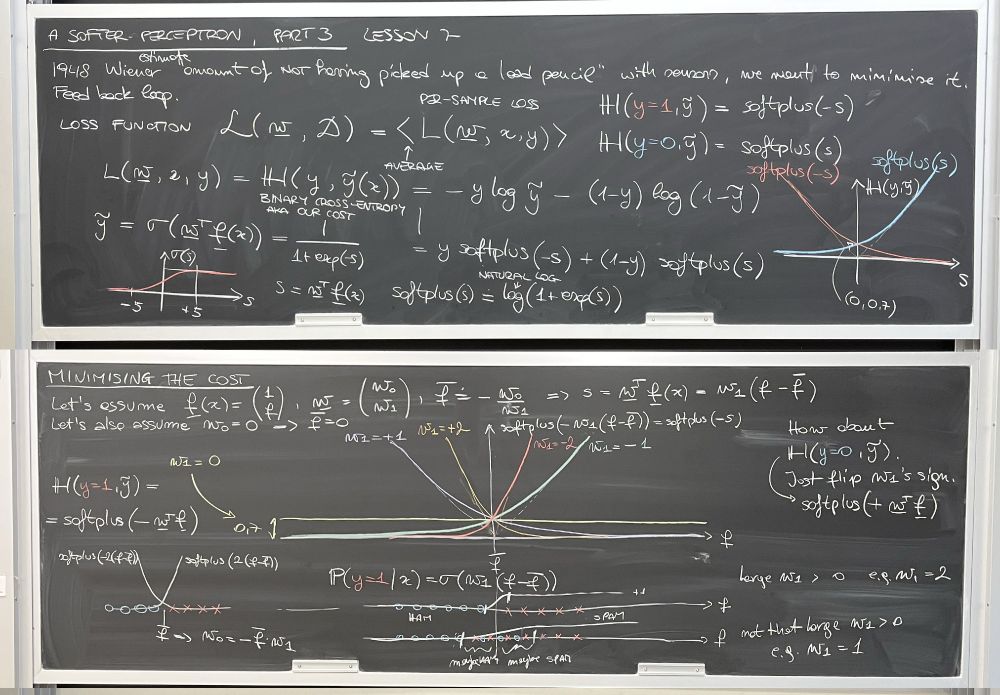
In today's episode, we review the concepts of loss ℒ(𝘄, 𝒟), per-sample loss L(𝘄, x, y), binary cross-entropy cost ℍ(y, ỹ) = y softplus(−s) + (1−y) softplus(s), ỹ = σ(𝘄ᵀ𝗳(x)).
Then, we minimised the loss by choosing convenient values for our weight vector 𝘄.
@nyucourant.bsky.social
Then, we minimised the loss by choosing convenient values for our weight vector 𝘄.
@nyucourant.bsky.social
February 11, 2025 at 9:14 PM
In today's episode, we review the concepts of loss ℒ(𝘄, 𝒟), per-sample loss L(𝘄, x, y), binary cross-entropy cost ℍ(y, ỹ) = y softplus(−s) + (1−y) softplus(s), ỹ = σ(𝘄ᵀ𝗳(x)).
Then, we minimised the loss by choosing convenient values for our weight vector 𝘄.
@nyucourant.bsky.social
Then, we minimised the loss by choosing convenient values for our weight vector 𝘄.
@nyucourant.bsky.social
Tue morning: *prepares slides*
Tue class: *improv blackboard lecture*
Outcome: unexpectedly great lecture.
Thu morning: *prep handwritten notes*
Thu class: *executes blackboard lecture*
Students: 🤩🤩🤩🤩🤩🤩🤩🤩🤩
@nyucourant.bsky.social @nyudatascience.bsky.social
Tue class: *improv blackboard lecture*
Outcome: unexpectedly great lecture.
Thu morning: *prep handwritten notes*
Thu class: *executes blackboard lecture*
Students: 🤩🤩🤩🤩🤩🤩🤩🤩🤩
@nyucourant.bsky.social @nyudatascience.bsky.social
January 30, 2025 at 8:20 PM
Tue morning: *prepares slides*
Tue class: *improv blackboard lecture*
Outcome: unexpectedly great lecture.
Thu morning: *prep handwritten notes*
Thu class: *executes blackboard lecture*
Students: 🤩🤩🤩🤩🤩🤩🤩🤩🤩
@nyucourant.bsky.social @nyudatascience.bsky.social
Tue class: *improv blackboard lecture*
Outcome: unexpectedly great lecture.
Thu morning: *prep handwritten notes*
Thu class: *executes blackboard lecture*
Students: 🤩🤩🤩🤩🤩🤩🤩🤩🤩
@nyucourant.bsky.social @nyudatascience.bsky.social
Vancouver’s cannellés are delicious! 😋
Get one at Granville Island public market!
Get one at Granville Island public market!

December 16, 2024 at 12:54 AM
Vancouver’s cannellés are delicious! 😋
Get one at Granville Island public market!
Get one at Granville Island public market!


UltraPixel: Advancing Ultra-High-Resolution Image Synthesis to New Peaks

December 14, 2024 at 1:52 AM
UltraPixel: Advancing Ultra-High-Resolution Image Synthesis to New Peaks
Scalable optimisation in the modular norm. Direct to the point. 😀😀😀

December 14, 2024 at 1:46 AM
Scalable optimisation in the modular norm. Direct to the point. 😀😀😀
Scaling continuous latent variable models as probabilistic integral circuits @nolovedeeplearning.bsky.social @gengala

December 14, 2024 at 1:28 AM
Scaling continuous latent variable models as probabilistic integral circuits @nolovedeeplearning.bsky.social @gengala
Optimization Algorithm Design via Electric Circuits @StephenPBoyd1


December 13, 2024 at 9:35 PM
Optimization Algorithm Design via Electric Circuits @StephenPBoyd1
Hello darkness, my old friend.


December 13, 2024 at 9:31 PM
Hello darkness, my old friend.
Convolutional Differentiable Logic Gate Networks @FHKPetersen

December 13, 2024 at 8:24 PM
Convolutional Differentiable Logic Gate Networks @FHKPetersen
An Eye for an Ear: Zero-shot Audio Description Leveraging an Image Captioner using Audiovisual Distribution Alignment

December 13, 2024 at 8:00 PM
An Eye for an Ear: Zero-shot Audio Description Leveraging an Image Captioner using Audiovisual Distribution Alignment
Outstanding presentation, finally!
DynaMo: In-Domain Dynamics Pretraining for Visuo-Motor Control @jeffacce.bsky.social @lerrelpinto.com
DynaMo: In-Domain Dynamics Pretraining for Visuo-Motor Control @jeffacce.bsky.social @lerrelpinto.com


December 13, 2024 at 7:40 PM
Outstanding presentation, finally!
DynaMo: In-Domain Dynamics Pretraining for Visuo-Motor Control @jeffacce.bsky.social @lerrelpinto.com
DynaMo: In-Domain Dynamics Pretraining for Visuo-Motor Control @jeffacce.bsky.social @lerrelpinto.com
Meta 3D AssetGen: Text-to-Mesh Generation with High-Quality Geometry, Texture, and PBR Materials

December 13, 2024 at 7:29 PM
Meta 3D AssetGen: Text-to-Mesh Generation with High-Quality Geometry, Texture, and PBR Materials
Universal Neural Functionals @AllanZhou17

December 13, 2024 at 7:26 PM
Universal Neural Functionals @AllanZhou17
BetterBench: Assessing Al Benchmarks, Uncovering Issues, and Establishing Best Practices @ankareuel.bsky.social

December 13, 2024 at 3:15 AM
BetterBench: Assessing Al Benchmarks, Uncovering Issues, and Establishing Best Practices @ankareuel.bsky.social
Hey, @neuripsconf.bsky.social, posters on the penultimate panel side are invisible. 🫥 There’s no light! This is extremely unfair for the presenter! See brightness comparison below. 👇🏻


December 13, 2024 at 2:57 AM
Hey, @neuripsconf.bsky.social, posters on the penultimate panel side are invisible. 🫥 There’s no light! This is extremely unfair for the presenter! See brightness comparison below. 👇🏻
Met the twins @roman-bushuiev.bsky.social @anton-bushuiev.bsky.social

December 13, 2024 at 1:43 AM
Met the twins @roman-bushuiev.bsky.social @anton-bushuiev.bsky.social